RollerDrive RGV系列
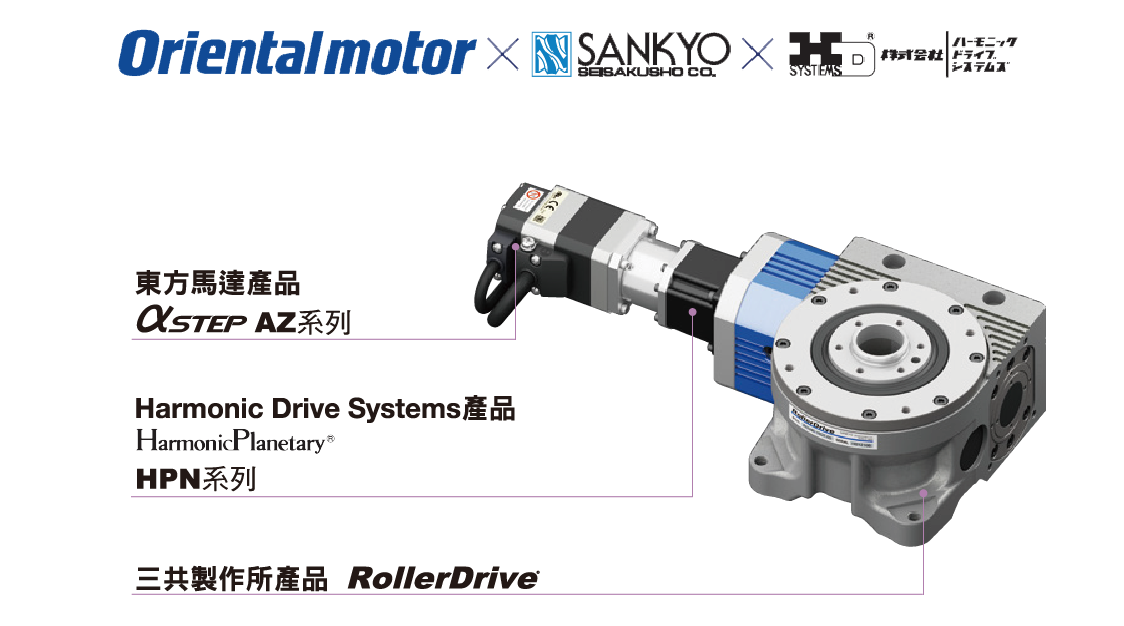
旋轉機構與馬達一體化的中空旋轉平台。
結合三共製作所的零背隙定位器、Harmonic Drive
Systems的HPN系列減速機,以及東方馬達的馬達產品,兼具高性能與易用性。
具備零背隙、高剛性等特點,且可採用無檢知器設計,是重物高精度定位設備的理想選擇。
- 大口徑中空工作台
- 高重量、大慣性驅動
- 高精度定位
- 無檢知器設計
特徵 | RollerDrive RGV系列
RollerDrive的關鍵特點!
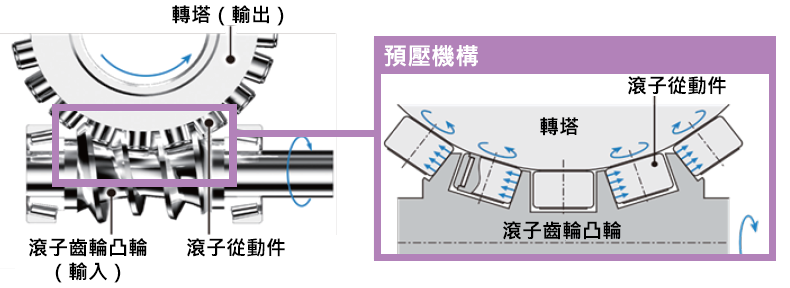
零背隙(RollerDrive的構造)
由螺桿形入力軸(滾子齒輪凸輪)與滾子從動件呈放射狀配置的出力軸(轉塔)所構成,兩軸呈直交配置。滾子從動件在預壓狀態下與楔形輸入肋表面接觸,並透過輸入軸側的調整機構,形成可完全消除背隙(晃動)的構造。
採用多個滾子從動件與輸入肋在預壓狀態下嚙合,因此可在輸入一圈的全區域內實現零背隙。
以小型馬達實現高重量與大慣性驅動
RollerDrive的高剛性構造結合HPN系列減速機的高減速比,可實現大轉矩。雖然搭載小型馬達,仍可進行高重量搬運與大慣性驅動。
採用多個滾子從動件與輸入肋在預壓狀態下嚙合,因此可在輸入一圈的全區域內實現零背隙。
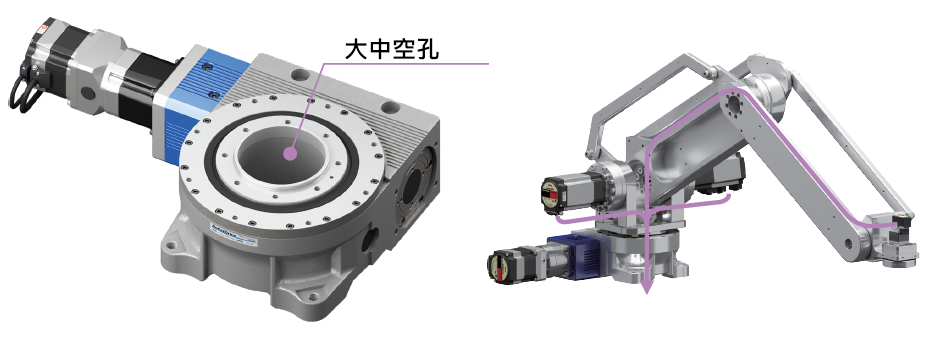
出力軸採中空工作台構造
可直接將設備的工作台或是機械手臂安裝在輸出平台。
與使用皮帶、皮帶輪等機構零件的情形相較,可減少機構設計、零件調配、皮帶鬆緊調整等的時間精力與成本。此外,藉由中空設計,例如在搭載機器人時,可將各關節馬達的電纜線穿過中空孔進行配線。
高精度定位
透過獨特的滾子齒輪凸輪機構與預壓機構,實現零背隙齒輪機構。
結合零背隙的RollerDrive與無背隙的HPN系列減速機,實現優異的定位精度。
馬達的關鍵特點!
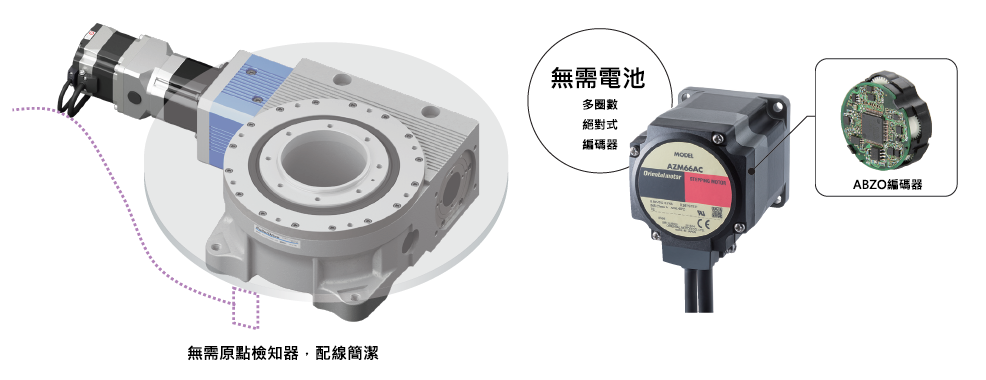
可採無檢知器設計
搭載無需電池機械式絕對式編碼器,無需原點檢知器或極限檢知器,有助於簡化配線設計。
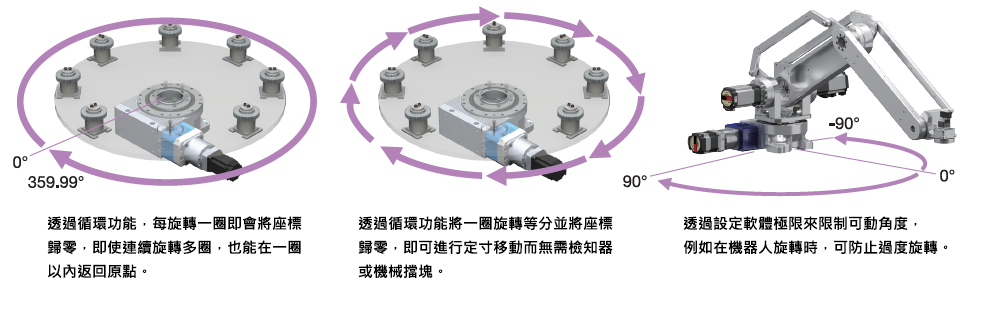
透過適用於旋轉控制的功能,讓控制更簡單
AZ系列搭載適用於旋轉控制的功能,可藉此輕鬆進行旋轉控制。
可配合上位控制器進行控制
備有多種介面規格的驅動器,可對應各種上位控制器。

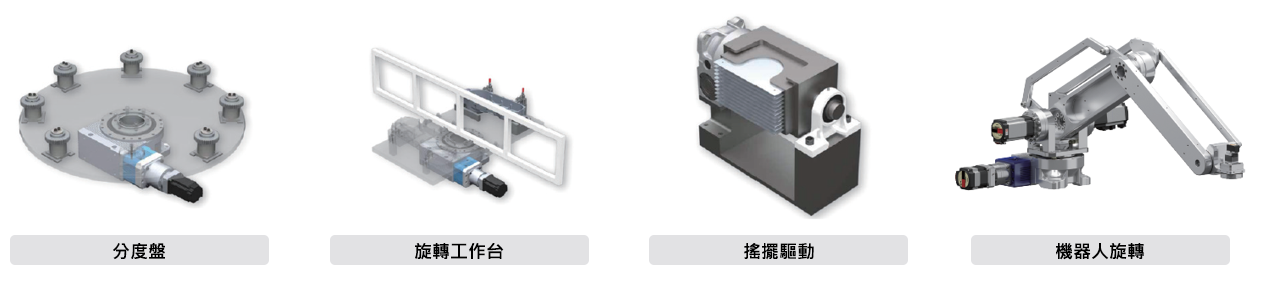
用途例
分度盤、旋轉工作台、搖擺驅動、機器人旋轉等
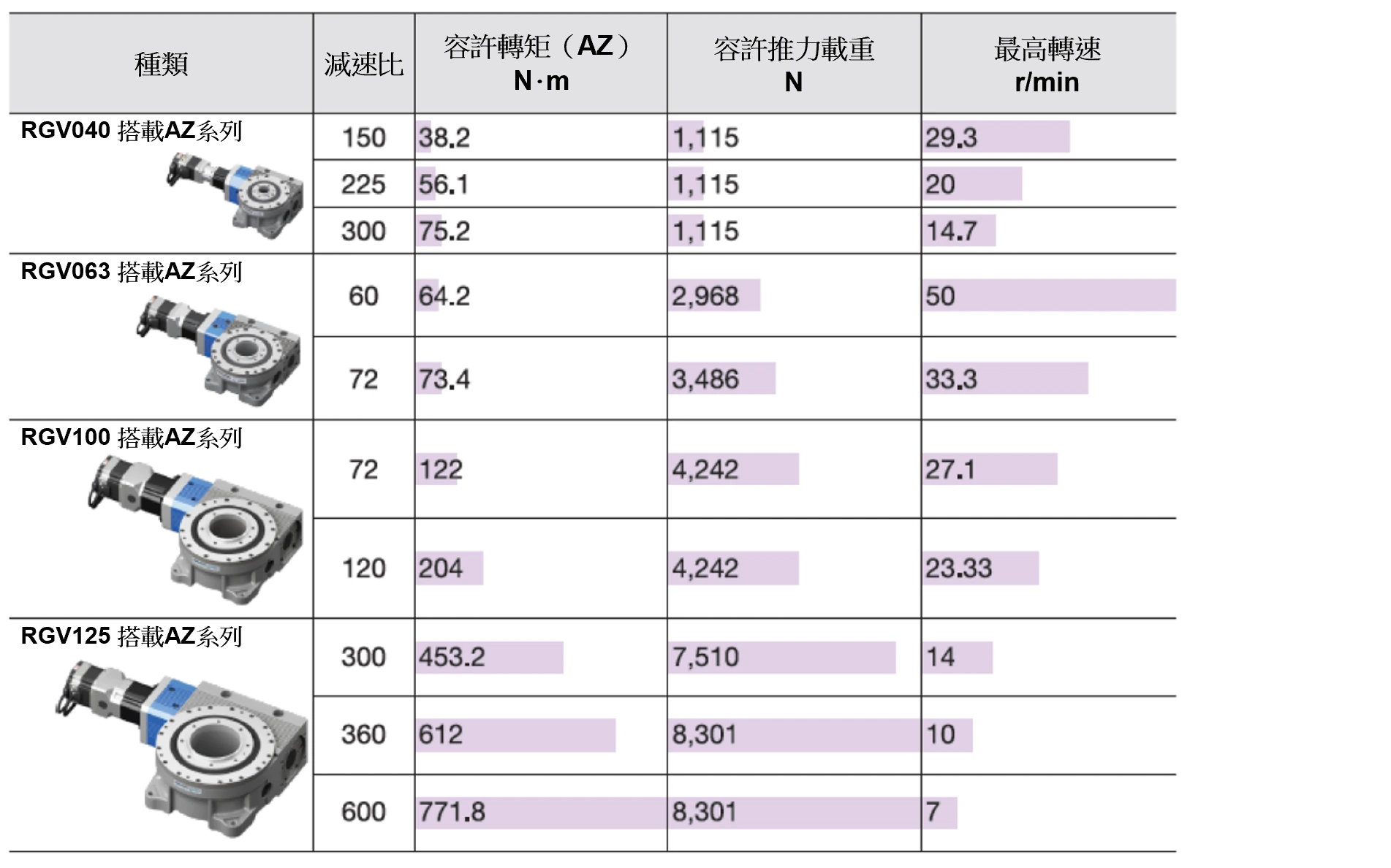
產品種類、品名
產品種類
品名看法
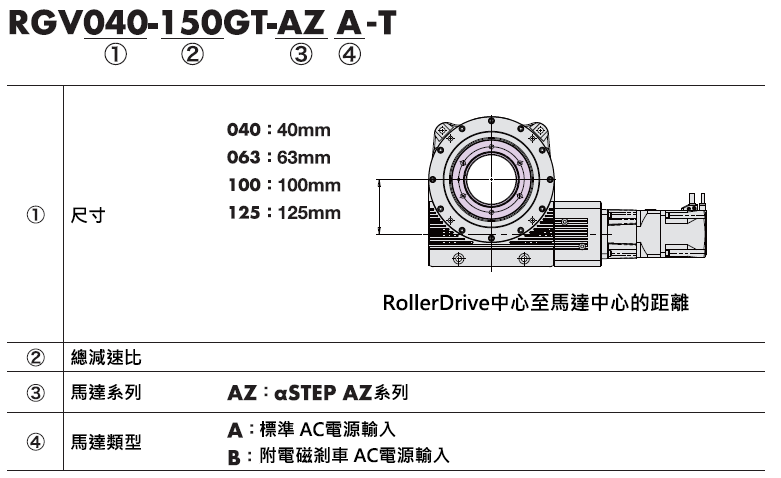
規格
RGV040(搭載AZ系列)
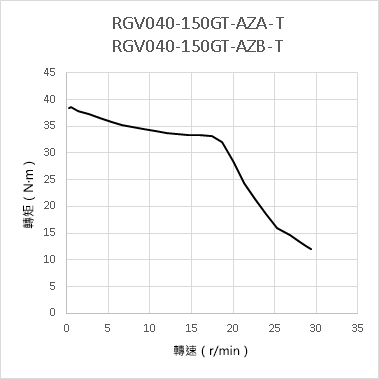
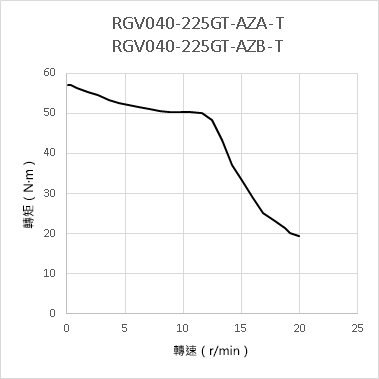
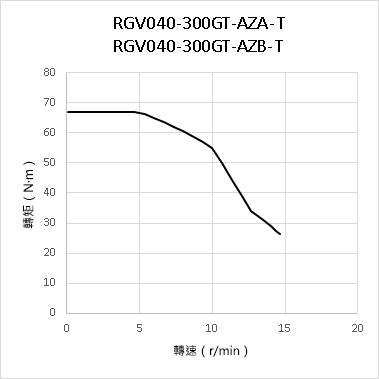
| RollerDrive組合品名(單出力軸) | RGV040-150GT-AZA-T | RGV040-225GT-AZA-T | RGV040-300GT-AZA-T |
|---|---|---|---|
| RollerDrive組合品名(附電磁剎車) | RGV040-150GT-AZB-T | RGV040-225GT-AZB-T | RGV040-300GT-AZB-T |
| RollerDrive品名 | RGV040-015GT-VN(減速比15) | RGV040-015GT-VN(減速比15) | RGV040-015GT-VN(減速比15) |
| 減速機品名 | HPN-11A-10-J8ADHZ-XG1-OM(減速比10) | HPN-11A-15-J8ADHZ-XF1-OM(減速比15) | HPN-11A-20-J8ADHZ-XF1-OM(減速比20) |
| 馬達品名 | AZM46A0C(單出力軸)、AZM46M0C(附電磁剎車) | ||
| 總減速比 | 150 | 225 | 300 |
| 轉子慣性慣量 (×10-4kg・m2) |
0.055 | 0.055 | 0.055 |
| 電磁剎車慣性慣量(×10-4kg・m2) | 0.016 | 0.016 | 0.016 |
| 馬達軸換算齒輪慣性慣量(×10-4kg・m2) | 0.004 | 0.002 | 0.001 |
| 容許轉矩(N・m) | 38.2 | 56.1 | 67 |
| 停止時保持轉矩 通電時(N・m) | 19.1 | 28 | 37.6 |
| 停止時保持轉矩 電磁剎車(N・m) | 19.1 | 28 | 37.6 |
| 最高轉速(r/min) | 29.3 | 20 | 14.7 |
| 反覆定位精度※1 (arcsec以下) |
±10 | ||
| 背隙(arcmin) | RollerDrive:0 HPN減速機:5 |
RollerDrive:0 HPN減速機:7 |
|
| 容許推力載重(N) | ±10 | ||
| 容許懸吊載重(N) | ±10 | ||
| 重量(kg)單出力軸/附電磁剎車 | 5.23/5.40 | 5.36/5.53 | 5.36/5.53 |
| 外形圖 | 單出力軸+附電磁剎車 | ||
| 2D CAD資料※2 |
單出力軸
附電磁剎車 |
單出力軸
附電磁剎車 |
|
| 3D CAD資料※2 |
單出力軸
附電磁剎車 |
單出力軸
附電磁剎車 |
|
※1:此數值代表不含減速機的RollerDrive本體精度。
※2:CAD資料請按右鍵點選「另存連結為」
※ 當輸出的慣性慣量較大時,若進行急加速或急減速,可能造成RollerDrive損壞。請設定較長的加速時間與減速時間,以避免超過最大轉矩。
※ 驅動器另售,關於組合驅動器的詳細內容,請參閱此處。
RGV063(搭載AZ系列)
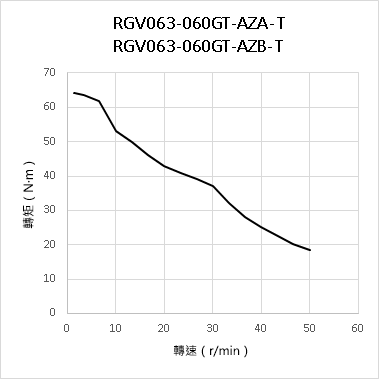
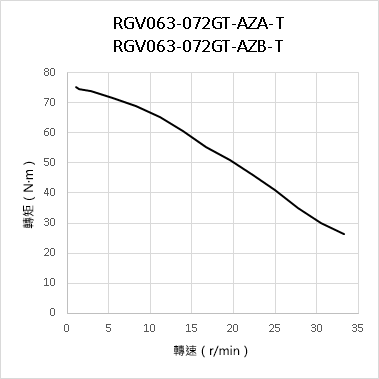
| RollerDrive組合品名(單出力軸) | RGV063-060GT-AZA-T | RGV063-072GT-AZA-T |
|---|---|---|
| RollerDrive組合品名(附電磁剎車) | RGV063-060GT-AZB-T | RGV063-072GT-AZB-T |
| RollerDrive品名 | RGV063-012GT-VN(減速比12) | RGV063-024GT-VN(減速比24) |
| 減速機品名 | HHPN-14A-05-J8AEA-YB1-OM(減速比5) | HPN-14A-03-J8AEA-YB1-OM(減速比3) |
| 馬達品名 | AZM66A0C(單出力軸)、AZM66M0C(附電磁剎車) | |
| 總減速比 | 60 | 72 |
| 轉子慣性慣量 (×10-4kg・m2) |
0.037 | 0.037 |
| 電磁剎車慣性慣量(×10-4kg・m2) | 0.016 | 0.016 |
| 馬達軸換算齒輪慣性慣量(×10-4kg・m2) | 0.067 | 0.163 |
| 容許轉矩(N・m) | 64.2 | 73.4 |
| 停止時保持轉矩 通電時(N・m) | 32.1 | 37.7 |
| 停止時保持轉矩 電磁剎車(N・m) | 32.1 | 37.7 |
| 最高轉速(r/min) | 50 | 33.3 |
| 反覆定位精度※1 (arcsec以下) |
±7 | |
| 背隙(arcmin) | RollerDrive:0 HPN減速機:5 |
|
| 容許推力載重(N) | 2,968 | 3,486 |
| 容許懸吊載重(N) | 2,642 | 3,082 |
| 容許慣量(N・m) | 160 | 176 |
| 重量(kg) 單出力軸/附電磁剎車 | 10.19/10.18 | 10.19/10.58 |
| 外形圖 | 單出力軸+附電磁剎車 | |
| 2D CAD資料※2 |
單出力軸
附電磁剎車 |
|
| 3D CAD資料※2 |
單出力軸
附電磁剎車 |
|
※1:此數值代表不含減速機的RollerDrive本體精度。
※2:CAD資料請按右鍵點選「另存連結為」
※ 當輸出的慣性慣量較大時,若進行急加速或急減速,可能造成RollerDrive損壞。請設定較長的加速時間與減速時間,以避免超過最大轉矩。
※ 驅驅動器另售,關於組合驅動器的詳細內容,請參閱此處。
RGV100(搭載AZ系列)
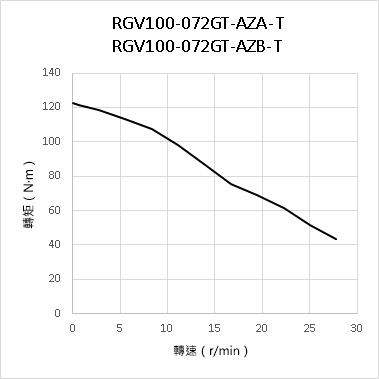
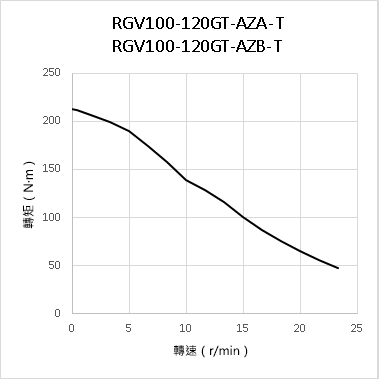
| RollerDrive組合品名(單出力軸) | RGV100-072GT-AZA-T | RGV100-120GT-AZA-T |
|---|---|---|
| RollerDrive組合品名(附電磁剎車) | RGV100-072GT-AZB-T | RGV100-120GT-AZB-T |
| RollerDrive品名 | RGV100-024GT-VN(減速比24) | RGV100-024GT-VN(減速比24) |
| 減速機品名 | HPN-20A-03-J8AFC-BC3-BL3-OM(減速比3) | HPN-20A-05-J8AFC-BC3-BL3-OM(減速比5) |
| 馬達品名 | AZM98A0C(單出力軸)、AZM98M0C(附電磁剎車) | |
| 總減速比 | 72 | 120 |
| 轉子慣性慣量 (×10-4kg・m2) |
1.09 | 1.09 |
| 電磁剎車慣性慣量(×10-4kg・m2) | 0.016 | 0.016 |
| 馬達軸換算齒輪慣性慣量(×10-4kg・m2) | 0.828 | 0.298 |
| 容許轉矩(N・m) | 122 | 204 |
| 停止時保持轉矩 通電時(N・m) | 61.2 | 102 |
| 停止時保持轉矩 電磁剎車(N・m) | 61.2 | 102 |
| 最高轉速(r/min) | 27.1 | 23.33 |
| 反覆定位精度※1 (arcsec以下) |
±5 | |
| 背隙(arcmin) | RollerDrive:0 HPN減速機:3 |
|
| 容許推力載重(N) | 4,242 | 4,242 |
| 容許懸吊載重(N) | 3,741 | 3,741 |
| 容許慣量(N・m) | 160 | 176 |
| 重量(kg) 單出力軸/附電磁剎車 | 30.9/31.5 | 31.5/32.1 |
| 外形圖 | 單出力軸+附電磁剎車 | |
| 2D CAD資料※2 |
單出力軸
附電磁剎車 |
|
| 3D CAD資料※2 |
單出力軸
附電磁剎車 |
|
※1:此數值代表不含減速機的RollerDrive本體精度。
※2:CAD資料請按右鍵點選「另存連結為」
※ 當輸出的慣性慣量較大時,若進行急加速或急減速,可能造成RollerDrive損壞。請設定較長的加速時間與減速時間,以避免超過最大轉矩。
※ 驅動器另售,關於組合驅動器的詳細內容,請參閱此處。
RGV125(搭載AZ系列)
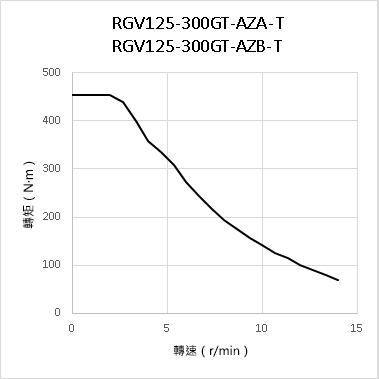
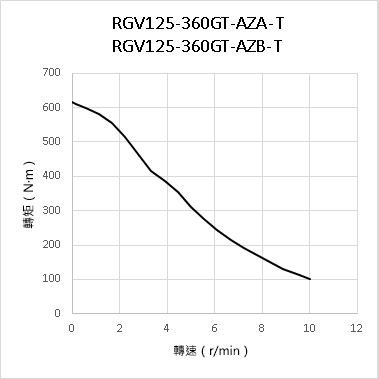
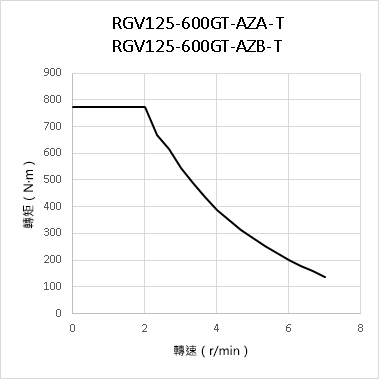
| RollerDrive組合品名(單出力軸) | RGV125-300GT-AZA-T | RGV125-360GT-AZA-T | RGV125-600GT-AZA-T |
|---|---|---|---|
| RollerDrive組合品名(附電磁剎車) | RGV125-300GT-AZB-T | RGV125-360GT-AZB-T | RGV125-600GT-AZB-T |
| RollerDrive品名 | RGV125-012GT-VN(減速比12) | RGV125-024GT-VN(減速比24) | RGV125-024GT-VN(減速比24) |
| 減速機品名 | HPN-20A-25-J8AFC-BB4-BL5-OM(減速比25) | HPN-20A-15-J8AFC-BB4-BL5-OM(減速比15) | HPN-20A-25-J8AFC-BB4-BL5-OM(減速比25) |
| 馬達品名 | AZM98A0C(單出力軸)、AZM98M0C(附電磁剎車) | ||
| 總減速比 | 300 | 360 | 600 |
| 轉子慣性慣量 (×10-4kg・m2) |
1.09 | 1.09 | 1.09 |
| 電磁剎車慣性慣量(×10-4kg・m2) | 0.016 | 0.016 | 0.016 |
| 馬達軸換算齒輪慣性慣量(×10-4kg・m2) | 0.034 | 0.095 | 0.037 |
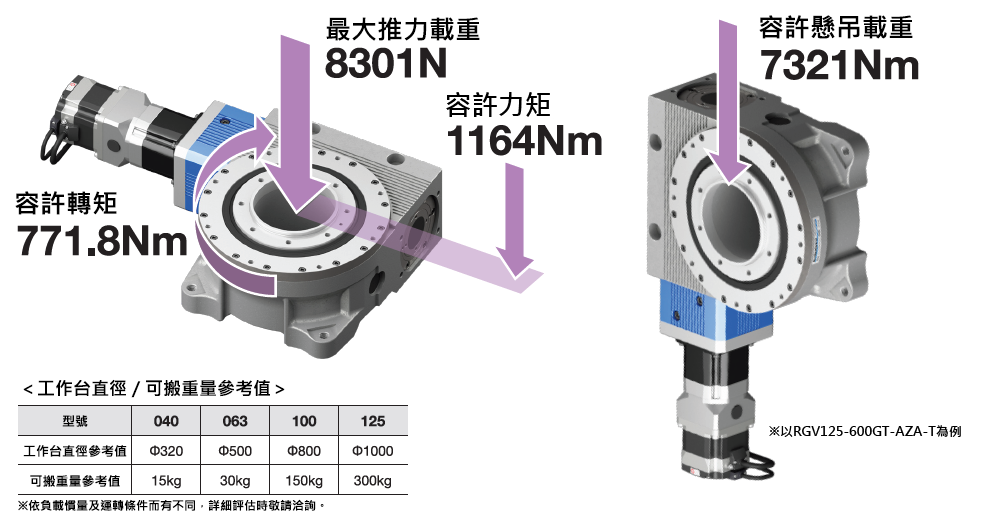
| 容許轉矩(N・m) | 453.2 | 612 | 771.8 |
| 停止時保持轉矩 通電時(N・m) | 260 | 302 | 520 |
| 停止時保持轉矩 電磁剎車(N・m) | 260 | 302 | 520 |
| 最高轉速(r/min) | 14 | 10 | 7 |
| 反覆定位精度※1 (arcsec以下) |
±5 | ||
| 背隙(arcmin) | RollerDrive:0 HPN減速機:5 |
||
| 容許推力載重(N) | 7,510 | 8,301 | 8,301 |
| 容許懸吊載重(N) | 6,624 | 7,321 | 7,321 |
| 容許慣量(N・m) | 1,005 | 1,164 | 1,164 |
| 重量(kg)單出力軸/附電磁剎車 | 50.3/50.9 | 50.3/50.9 | 50.3/50.9 |
| 外形圖 | 單出力軸+附電磁剎車 | ||
| 2D CAD資料※2 |
單出力軸
附電磁剎車 |
||
| 3D CAD資料※2 |
單出力軸
附電磁剎車 |
||
※1:此數值代表不含減速機的RollerDrive本體精度。
※2:CAD資料請按右鍵點選「另存連結為」
※ 當輸出的慣性慣量較大時,若進行急加速或急減速,可能造成RollerDrive損壞。請設定較長的加速時間與減速時間,以避免超過最大轉矩。
※ 驅動器另售,關於組合驅動器的詳細內容,請參閱此處。
縮小產品範圍