中空旋轉平台
DGⅡ系列

- 中空旋轉平台與閉回路步進馬達一體化
- 也可搭載伺服馬達
- 安裝尺寸60~200 mm,中空徑ϕ20~100 mm
- 高強度、高精度定位
特徵 | 中空旋轉平台DGⅡ系列
採用交叉滾子軸承的中空旋轉平台,並與步進馬達一體化的產品。
中空旋轉平台 DGⅡ 系列是將採用交叉滾子軸承的中空旋轉平台與步進馬達整合為一體的產品。由於電動模組內部採用減速機構造,因此能提供高輸出驅動能力。
您可以透過影片更清楚了解中空旋轉平台DGⅡ系列的特點。
模組產品的特點
以搭載AZ系列為例介紹DGⅡ系列的特徵。
可實現負載的直接連結
可直接安裝慣性慣量較大的輸出平台和機械手臂等,因此不需要連接零件(軸),從而可減少設計和組裝的麻煩,降低零件成本。
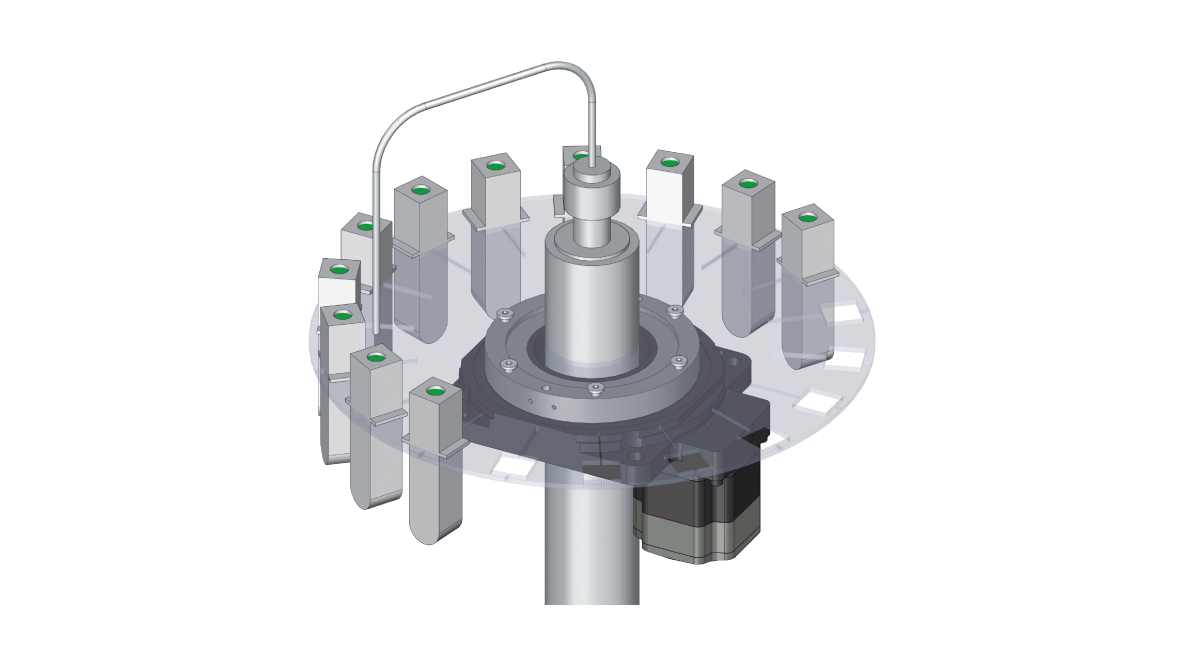
大口徑中空輸出平台
可以使用中空孔徑來配置電纜線或空氣、液體的配管。

高強度
較重的大型工作物也能進行驅動
最大容許推力載重為 4000 N。最大容許慣量為500N・m。即使工作物的重量或慣性慣量較大,也可以進行驅動。

表面偏差小
可在遠離輸出平台中央的位置放置工作物。
由於容許慣量進一步提升,因此手臂長度可加長使用。



手臂長度可延長約 3 倍,擴大可動範圍

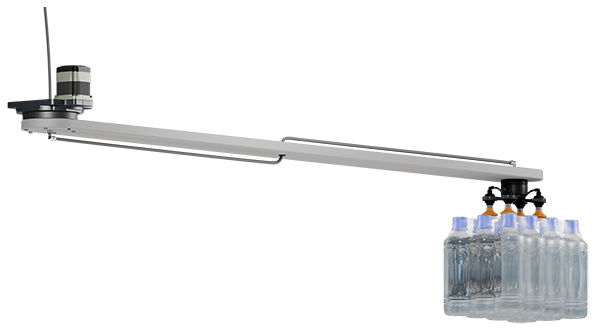
| 變更前 | 變更後 | |
|---|---|---|
| 安裝角尺寸 [mm] | 130 | 130 |
| 容許慣量 [N·m] | 50 | 160 |
| 負載轉矩 [N·m] | 29.4 | 88.2 |
| 負載重量 [kg] | 6 | 6 |
| 距離桌面中心的距離 [m] | 0.5 | 0.5 |
| 寶特瓶[瓶] | 12 | 12 |
容許慣量提升。達到與大一尺寸(130 mm)相同的容許慣量,協助設備小型化
因容許慣量值提高,可在更小的機身尺寸上實現同等的高容許慣量,有助於設備的小型化。


| 變更前 | 變更後 | |
|---|---|---|
| 安裝角尺寸 [mm] | 130 | 85 |
| 容許慣量 [N·m] | 50 | 50 |
| 負載轉矩 [N·m] | 29.4 | 29.4 |
| 負載重量 [kg] | 6 | 6 |
| 距離桌面中心的距離 [m] | 0.5 | 0.5 |
| 寶特瓶[瓶] | 12 | 12 |
定位精度
| 馬達縱向 | 馬達橫向 | 馬達橫向(附安裝腳座) | |
|---|---|---|---|
| 齒隙 | 無齒隙 | 3~10 arcmin | 6 arcmin |
| 反覆定位精度 | ±15 arcsec(±0.004°) | ±15 arcsec(±0.004°) | ±30 arcsec(±0.008°) |
能縮短設備起動時間的一體型構造
減少「設計」「組裝」「調整」的所需時間。
可直接將設備的平台或是機械手臂安裝在輸出平台。

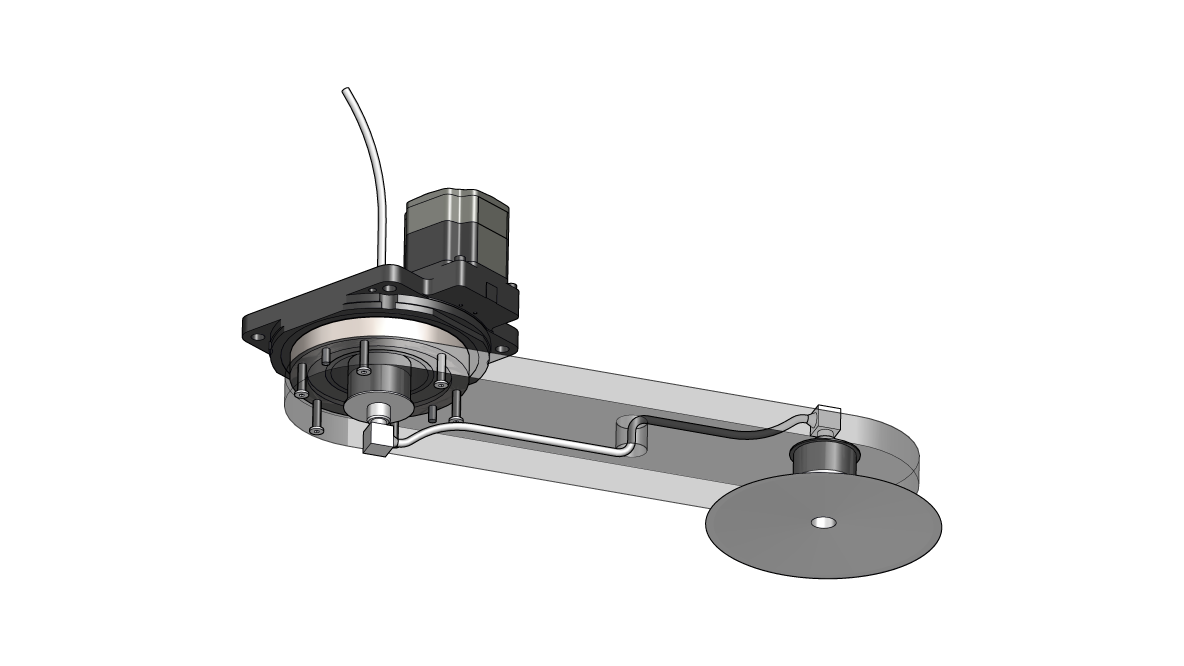
採用交叉滾柱軸承達到高輸出驅動

- 上圖為馬達縱向的構造。關於中空輸出平台的構造,馬達橫向亦同。
可根據空間選擇馬達方向
- 備有馬達縱向、馬達橫向及馬達橫向(附安裝腳座)的規格。可依設備內的安裝空間進行選擇。
- 馬達橫向的厚度較薄,可降低安裝面的高度。此外,由於是搭載連接器型*的馬達,接線簡單。
- *DC電源輸入 安裝尺寸60mm為電纜線型馬達。

馬達橫向安裝的優點(附安裝腳座)
- 不須加工馬達開孔,安裝板可簡單化。
- 可將電纜線或配管等配置在平台下方腳座間。

可選擇安裝方向
DGⅡ系列除了可以水平安裝,亦可安裝在天花板上或採壁掛安裝,因此設備設計的範圍相當寬廣。

搭載αSTEP AZ系列的優點
搭載無需電池絕對式編碼器
搭載小型的無需電池絕對式編碼器(ABZO檢知器)。可提高生產力並降低成本。

- 機械式檢知器
即使斷電也可保持位置資訊 - 搭載多圈數絕對式編碼器
可從標準的原點,以馬達軸檢知±900圈(1800圈)的絕對位置
無需外部檢知器
採絕對式系統,無需原點檢知器、極限檢知器。
優點
- 高速原點復歸+原點復歸精度提升
- 降低成本
- 節省配線
- 不受到外部檢知器錯誤動作的影響
無需電池
機械式檢知器無需電池。
位置資訊是利用ABZO檢知器進行機械式管理。
優點
- 不需要更換電池
- 提高驅動器設置的自由度
- 海外運送也令人安心
透過編程功能簡化主程式
AZ系列搭載連結運轉、運轉時間設定、條件分歧及Loop運轉等多種編程功能(部分機種除外)。
可以使用支援軟體MEXE02進行設定,可以簡化上位控制器的程序程式。

- 定位運轉資料設定值(最大256點)
- 通用輸出入點數(輸入10點、輸出6點)
- 通訊用輸出入點數(輸入16點、輸出16點)
便捷的操作與設置
使用AZ系列的功能,可進行以下運轉:
透過快速操作縮短生產節拍
針對設定的目標位置,以最短距離移動。

例)
從0°的位置移動至270°時,自動選擇逆時針方向轉動的最短旋轉方向驅動。
設定禁止進入範圍
可有效防止設備與障礙物相撞而損壞,並確保作業區域。

可設定多圈數運轉
具有將現在位置自動重設為「0°」的循環功能。可進行無限多圈數運轉。
縮短設備起動時間
出廠時已設定中空旋轉平台所需的參數。有助於減少設備設定時間。
[在出貨時設定的參數範例]
- 原點位置
- 解析度設定(0.01°/step)
- 輸出平台旋轉方向設定
- 循環功能設定(±180°)
- * 可變更各初始設定值。

用途例和使用例
低速、低振動用途
透過微步級驅動方式及平滑驅動功能,即使在低速領域也能低振動進行運轉動作。
例)藥液塗抹設備
低速下也能均勻穩定塗抹。
高精度定位的用途
停止時不會產生軸微幅振動的微振現象。最適合不希望停止時產生振動的用途。
例)影像檢查設備
不產生微振,可準確讀取影像。
可配合上位控制器選購的驅動器
備有對應各種控制、系統、介面的產品陣容。
| 驅動器種類 | 對應介面 | 單軸驅動器 | ||
|---|---|---|---|---|
| AC電源輸入 | DC電源輸入 | |||

搭載 AZ系列 |

搭載 AZ系列 |
|||
| 網路對應 | 透過FA網路,可由上位控制器直接控制驅動器。 |
EtherCAT | ○ | ○ |
| EtherNet/IP™ | ○ | ○ | ||
| PROFINET | ○ | ○ | ||
| MECHATROLINK-III | ○ | - | ||
| SSCNET Ⅲ/H | ○ | - | ||
| 內藏定位功能 | 將運轉資料寫入驅動器。 可透過 Modbus (RTU) 和 I/O 控制。可使用網路轉換器透過 CC-Link 進行控制 |
Modbus(RTU) I/O CC-Link* |
○ | ○ |
| RS-485通訊附脈波列輸入 | 以脈波信號控制 馬達狀態信息可通過Modbus(RTU)進行監視。 |
脈波列輸入 Modbus(RTU) |
○ | ○ |
| 脈波輸入 | 以脈波信號控制 | 脈波列輸入 | ○ | ○ |
- * 使用網路轉換器時可支援(另售)。
搭載AZ系列 產品種類
因為搭載的馬達相同,驅動方式與維修方法相同。
電動模組產品 (搭載AZ系列)
| 電動滑台 | 電動缸 | 小型電動缸 | 齒條・齒輪系統 | 電動夾爪 | 中空旋轉平台 |
|---|---|---|---|---|---|
| EZS系列 | EAC系列 | DR系列 DRS2系列 |
L系列 | EH系列 | DGⅡ系列 |
- 不同系列所配備馬達的電源輸入有所不同。詳細的產品陣容請參閱各系列的頁面。
支援軟體、監視功能
使用支援軟體 MEXE02從電腦簡單驅動
資料設定軟體MEXE02是從起動到維修皆可支援的軟體。除了可在電腦上設定或編輯運轉資料及各種參數,亦可示教、監視各種狀態。
透過各種功能,從起動到維修全面支援
-
起動、評估
備有可助於配線檢查或測試運轉的功能。
- 運轉資料的設定及儲存
- I/O 測試
- 示教・遙控運轉
-
調整
安裝設備後,有助於馬達動作調整的功能。
- 波形監視
-
診斷、維修
備有開始運用後有助於發生問題時進行診斷或維修功能。
- Alarm監視
- 組合資訊監視
- 狀態監視
-
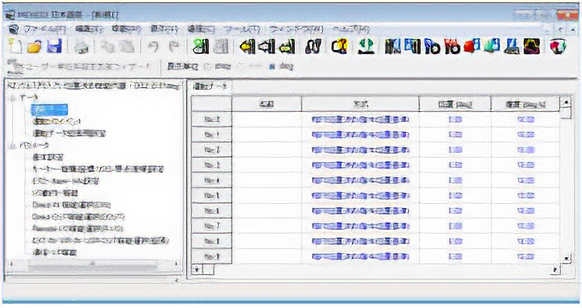
運轉資料/參數設定畫面 -
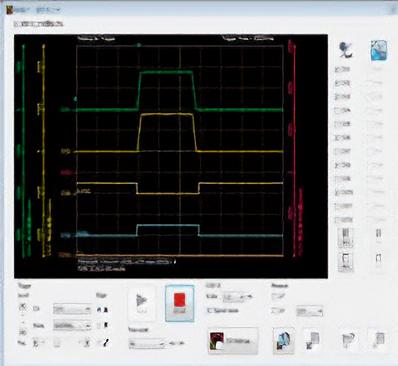
波形監視
可與協作機器人連動,作為周邊軸使用
可用於機器人周邊軸的旋轉應用。
組合產品(適用於Universal Robot・FANUC)
-
- 中空旋轉平台
- DGⅡ系列 搭載αSTEP AZ系列(DC電源輸入)
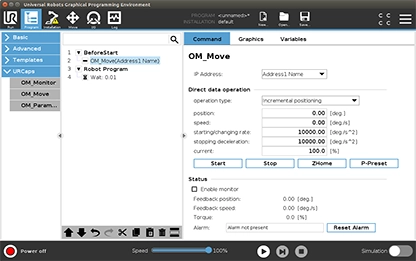
Universal Robot認證應用

可直接從URCap控制
DGII系列專用的URCap*1可以同時控制優傲機器人和DGII系列。可以透過優傲機器人示教型設定器變更移動量、轉速等。
Universal Robot產品規格
-
- URCap
- OM_DG2-xxxurcap *2
-
- 支援系列
- e系列
-
- PolyScope 版本
- PolyScope 5.12.2以上
提供軟體和操作手冊。
URCap
操作手冊 (僅日文)
- *1 URCap是Universal Robot的圖形程式介面。
- *2 xxx 包含版本資訊。
FANUC插件對應周邊機器

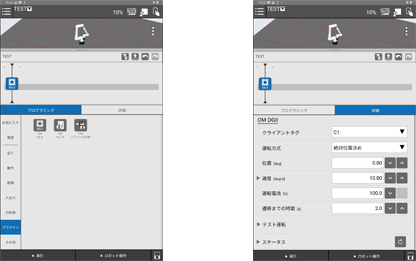
可直接透過平板 TP 控制
使用專為 DGⅡ 系列設計的插件軟體,可實現 CRX 系列與 DGⅡ 系列的連動控制。無需 PLC 等外部控制設備,即可透過 FANUC 的平板 TP 設定・變更移動量及速度等參數。
FANUC 產品規格
-
- 插件軟體
- ORIENTALMOTOR_AZ.ipl
-
- 支援系列
- CRX系列
需要軟體選項「用戶插座訊息功能(A05B-2600-R648)」。
提供軟體和操作手冊。
插件軟體
操作手冊 (僅日文)
注意事項
我們的服務不包含有關 UNIVERSAL ROBOTS 或 FANUC 產品的諮詢。
相關產品
DGII系列中空旋轉平台無馬達型
DGII系列的單體模組產品(無馬達型)。保持DGII系列的模組產品結構,透過聯軸器連接,可與各品牌伺服馬達搭配使用。適用於大慣性驅動的應用。
替代品請點選此處
DGN130R2-18
DGN200R2-18







縮小產品範圍



