小型機器人OVR
3軸水平關節型機器人(SCARA機器人)
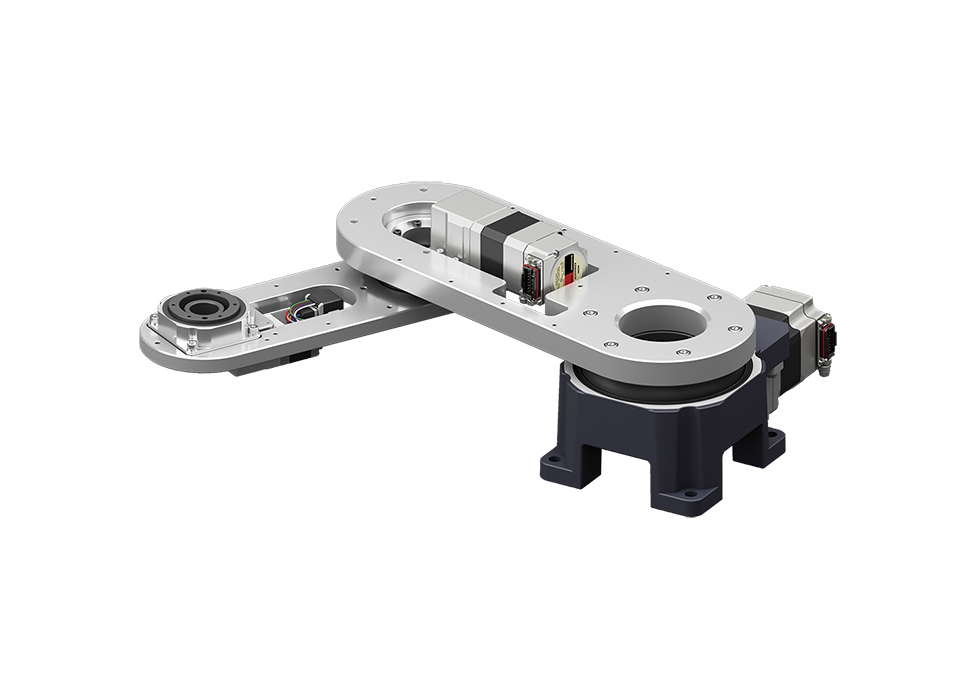
- 重量7.6 kg~、高度137 mm~,輕量、薄型
- 適用於狹窄的空間
- 第三臂可依照設備需求自由設計
- 最大臂展長備有3種規格,410 mm/460 mm/700 mm、可搬重量3 公斤
- 驅動馬達:搭載無需電池絕對式編碼器αSTEP AZ系列(DC電源輸入)
追加可進行全方位動作、最大臂展長460 mm/700 mm產品規格。
特徵 | 3軸水平關節型機器人
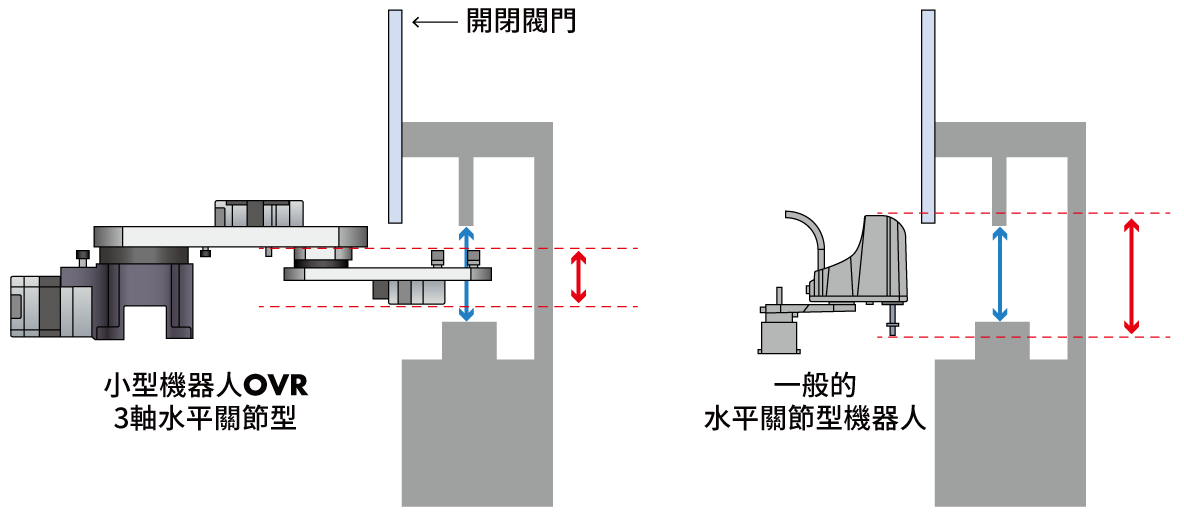
薄型水平關節型機器人
與一般的水平關節型機器人相比,薄型的設計使機器人能夠用於狹窄的空間,例如在設備上安裝和拆卸零件。
為您介紹搭配電動升降設備,EL系列的工作物搬運動作
- 透過升降機器人本體,即可輕鬆擴展上下方向的動作範圍。
- 由於能降低機器人前端高度,因此可進入狹小空間。
- 無需設計外部滑軌或安排零件採購,可縮短設備建置時間。
可依用途選擇產品陣容
除了既有的水平關節型機器人外,還追加了能夠全方位動作的水平關節型機器人。
高可搬重量、長行程等規格的優化擴大了應用範圍。
種類和特徵
| 品名 | OVR3041K3-H | NEWOVR3046K10-H | NEWOVR3070K3-H | |
|---|---|---|---|---|
| 外觀 |
|

|

|
|
| 特徵 | ・薄型、輕量 ・低成本 |
・高可搬重量 ・全方位動作縮短生產節拍 ・簡易防塵構造 |
・長行程 ・全方位動作縮短生產節拍 ・簡易防塵構造 |
|
| 最大臂展長 | 410 mm | 460 mm | 700 mm | |
| 最大可搬重量 | 3 kg | 10 kg | 3 kg | |
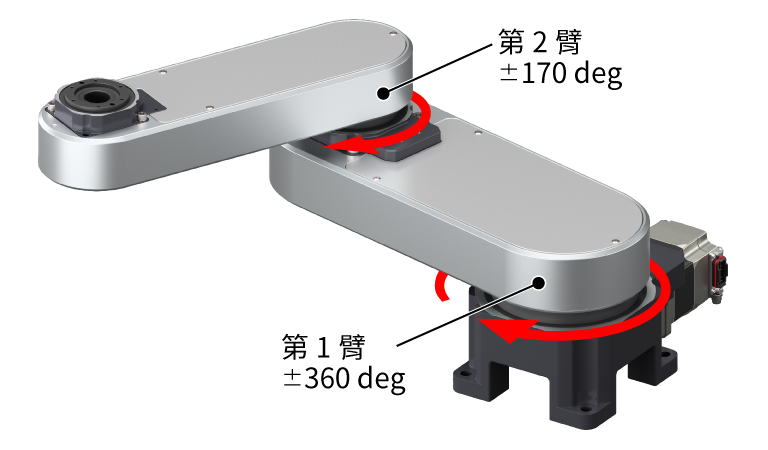
| 可動範圍* | 第1軸 | ±170度 | ±360度 | ±360度 |
| 第2軸 | ±140度 | ±170度 | ±170度 | |
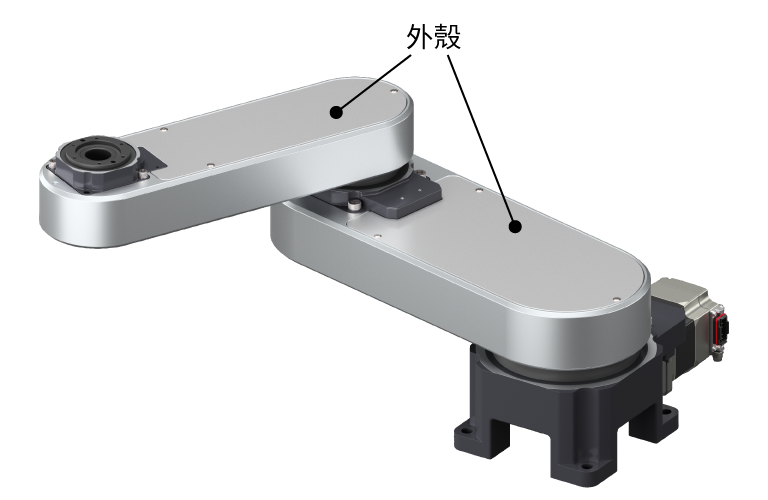
| 外蓋 | - | 附外蓋 | 附外蓋 | |
- *定位PIN於原點銷孔中的設置原點姿勢的操作範圍。
全方位動作縮短生產節拍
可提供能夠全方位動作的產品。
既有產品與新產品系列的動作比較
透過全方位可動的全新產品系列,手臂可通過機器人上方,因此能以最佳距離進行作動。
藉此,與既有產品相比,可將節拍時間縮短 37%。
動作範圍
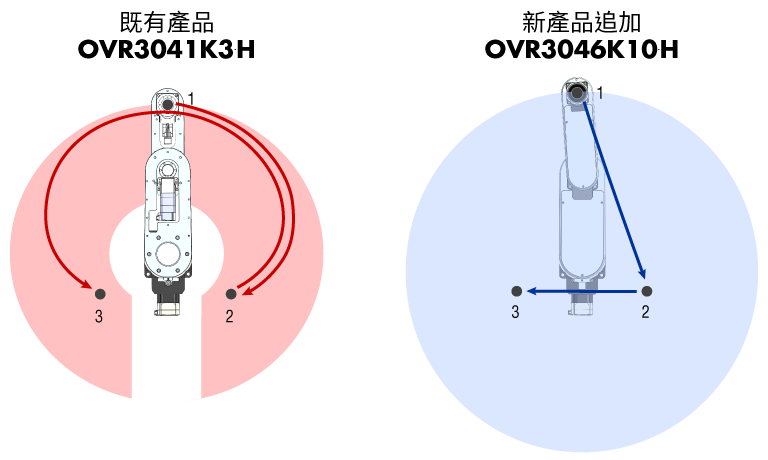
既有產品 OVR3041K3-H
節拍時間 8.6 sec
全新產品系列 OVR3046K10-H
節拍時間 5.4 sec
簡易防塵構造
提供配有簡易防塵罩的產品。可防止異物侵入,並抑制電纜線磨損等情況的發生。
可自行設計以符合您的設備需求
應用例
可以根據用途自由設計機器人。
- 薄型且小型的構造
- 第三臂可自由設計
- 與電動升降柱或致動器組合使用,可在水平方向的基礎上,將可動範圍擴展至上下方向。
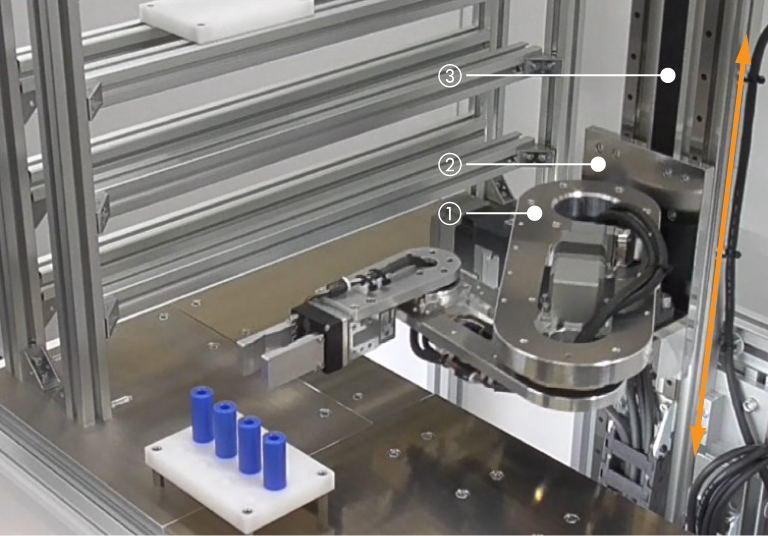
例1:機器人本體的升降
由於機器人前端高度較低,可在狹小空間內動作。另外、水平方向沒有障礙,能夠進行全方向動作。
設置形式 支架安裝、天花板安裝
上下方向的行程:短~中(50 ~ 300 mm)

| ➀ | 小型機器人OVR 3軸水平關節型 OVR3070K3-H |
|---|---|
| ➁ | 電動升降柱 EL系列 EL1210AZMK |
例2:機器人本體的上下驅動
由於機器人前端高度較低,可在狹小空間內動作。能夠對應廣泛範圍的上下驅動。
設置形式 壁掛式 *全方位型會有無法動作的區域產生
上下方向的行程:短~長
| ➀ | 小型機器人OVR 3軸水平關節型 OVR3041K3-H |
|---|---|
| ➁ | 安裝腳座 PDG130-6 |
| ➂ | FESTO製造的模組產品 (無銷售) EGC-HD-125-BS |
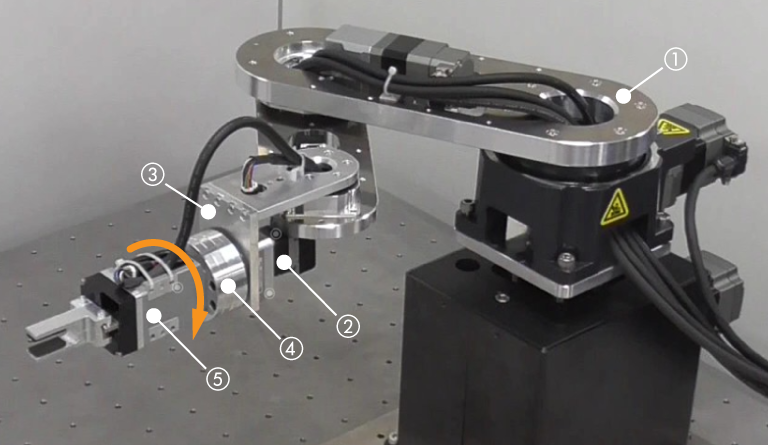
例3:末端軸的上下驅動
可實現狹窄空間的上下驅動。
設置形式 支架安裝
上下方向的行程:短(30 mm)
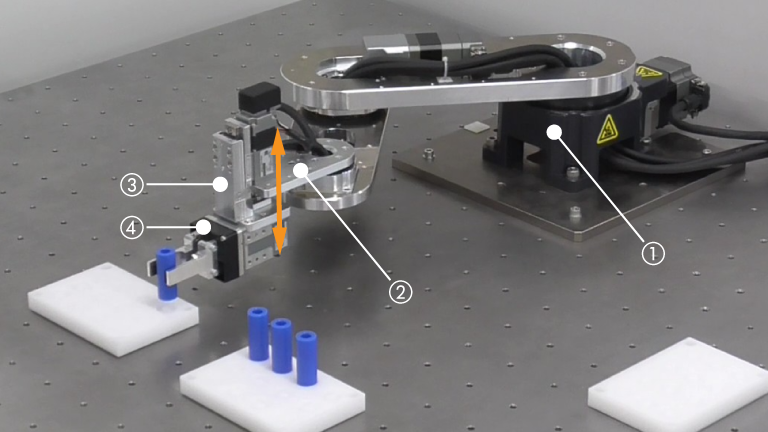
| ➀ | 小型機器人OVR 3軸水平關節型 OVR3041K3-H |
|---|---|
| ➁ | 安裝腳座 PDG60-4 |
| ➂ | 小型電動缸 DR28T■■03-AZAKD |
| ➃ | 電動夾爪 EH系列 EH4-AZAKH |
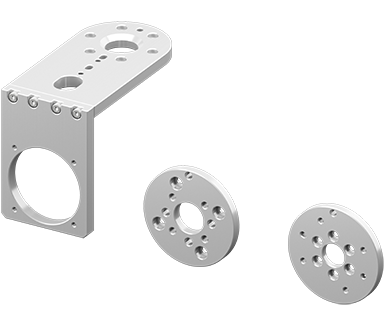
例4:末端軸的旋轉驅動
可以改變末端軸的角度,例如翻轉工件。
設置形式 支架安裝、天花板安裝
| ➀ | 小型機器人OVR 3軸水平關節型 OVR3041K3-H |
|---|---|
| ➁ | AZ系列馬達+Harmonic Drive Systems製齒輪 AZM24AK + CSF-8-■-2UP-SP-A |
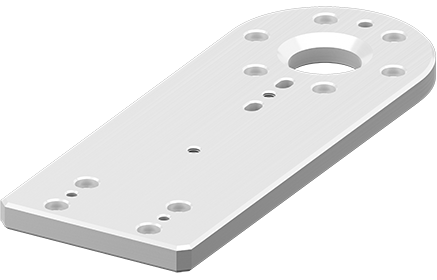
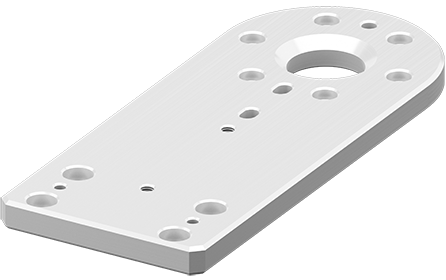
| ➂ | 安裝腳座 PDG60-5 |
| ➃ | 機器人用安裝凸緣 P3F2 |
| ➄ | 電動夾爪 EH系列 EH4-AZAKH |
為了能夠快速推進機器人的導入,備有方便的周邊設備。
可選設置形式
可選擇支架安裝或天花板安裝。
| 設置形式 | 支架安裝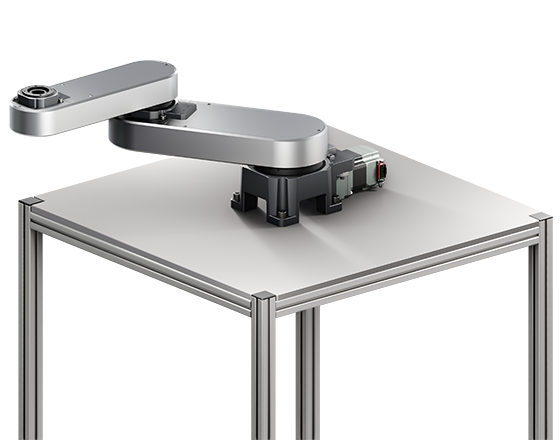
|
天花板安裝
|
|---|---|---|
| 安裝便利性 | 容易安裝 | ・機器人需要倒置 ・需要堅固的安裝底座 |
| 作業空間 | 需要考慮機器人安裝空間來配置棧板等物品 | 可以利用機器人正下方的空間 |
為您介紹頂部安裝的工件移載動作。透過頂部安裝,能有效利用機器人正下方機架部分的作業空間。
可自行維護

簡單控制的機器人控制器


也提供將機器人控制器 MRC01 與 AZ 系列驅動器(最多可搭載 8 軸)整合於同一套裝的 MRCU 系列產品。
有助於降低導入機器人時的控制難度,並縮短啟動時間。
- 注意事項:使用機器人時,請考慮其作為工業機器人的安全性。(不能用於協作型機器人)
使用搭載無需電池絕對式編碼器αSTEP AZ系列
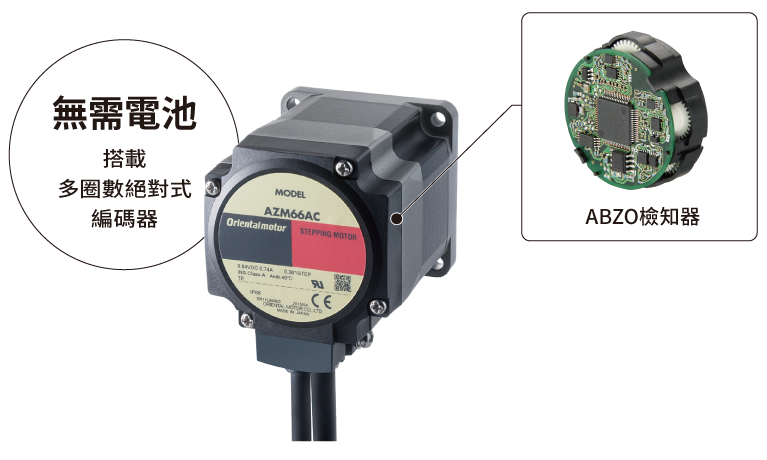
所有軸均使用αSTEP AZ系列(DC電源輸入)。
絕對式方式消除了外部檢知器的需要,減少了接線,因為無須電池、減少了維護管理的需要。
DC電源輸入使電源線佈線變得容易。可靈活應對線路安裝、佈局變化。
導入機器人前的實用工具


產品詳細介紹
如需查看規格、特性、外形圖、CAD、使用說明書等詳細產品信息,請點擊下方的產品名稱連結。
OVR3041K3-H(最大臂展長410mm)
OVR3046K10-H(最大臂展長460mm)
OVR3070K3-H(最大臂展長700mm)
將自製機器人簡易導入至現有系統
MRCU系列與上位控制器的連接,可透過EtherNet/IP™進行直接控制。無需對現有設備的控制系統進行大幅修改,即可輕鬆導入小型機器人 OVR。機器人的程式編寫可使用程式設計軟體MRC Studio(免費)來進行。已預先登入小型機器人OVR的機構資訊,可以更輕鬆地進行初始設定。
- *EtherNet/IP™為ODVA的註冊商標。
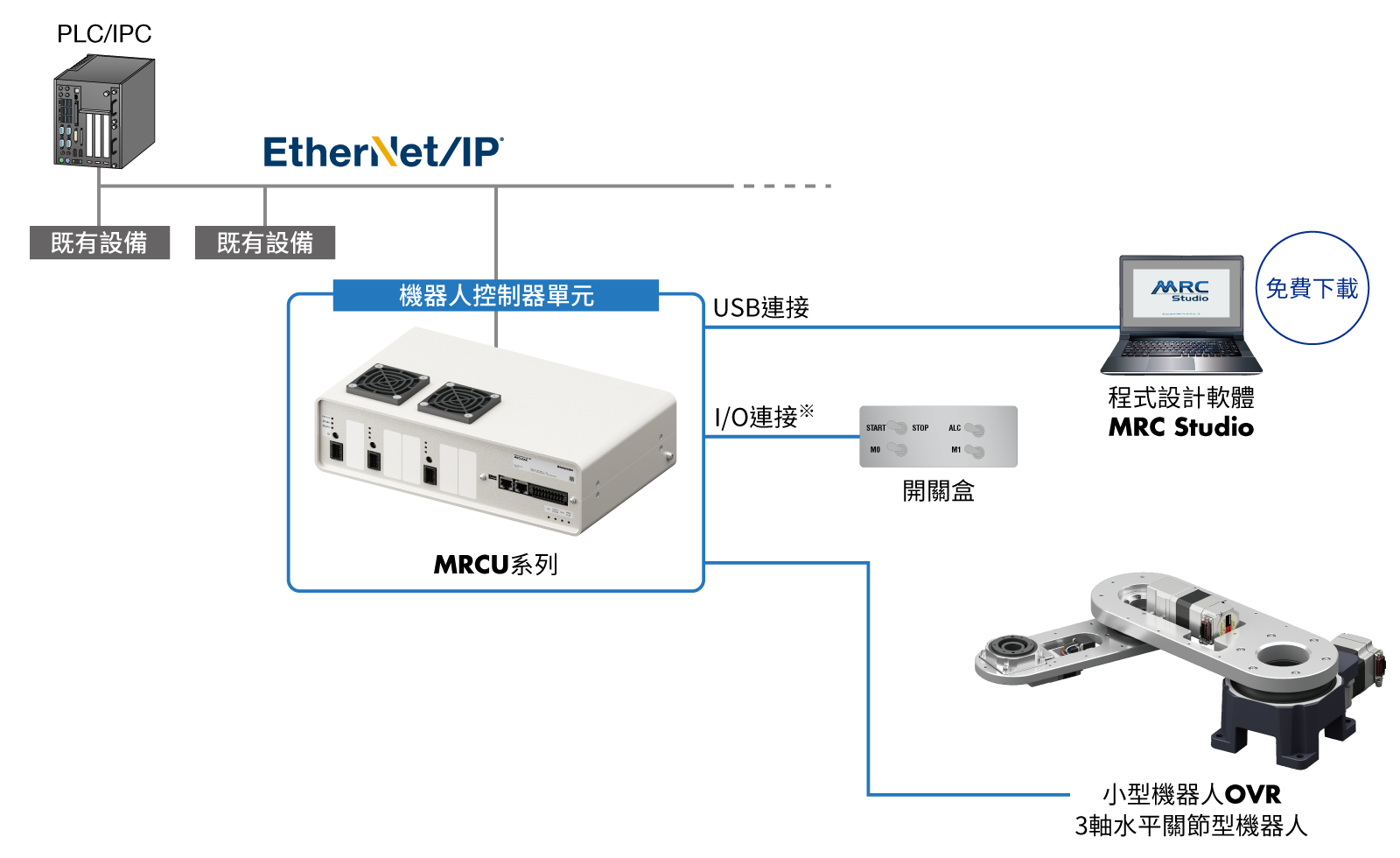
- *MRCU即使連接I/O(無上位控制器)亦可操控。
- ・另外,還需要 DC 電源與末端軸。
- ・電纜線為另售
- ・電源電纜線提供型號CC09MRCU030 (長度3m)。
3軸水平關節型用安裝腳座
搭配3軸水平關節型使用的各種安裝腳座。
| 品名 | 適用機器人 | 安裝圖 |
|---|---|---|
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
||
|
|
OVR3041K3-H OVR3046K10-H*1 OVR3070K3-H*1 |
 |
|
|
||
|
OVR3041K3-H | 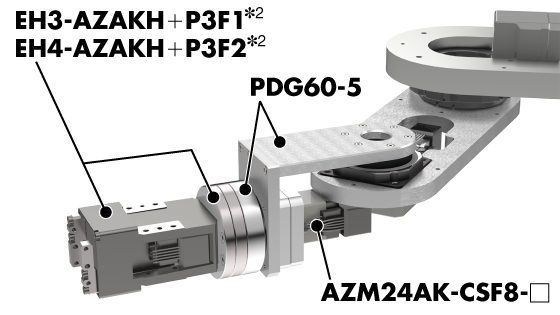 |
|
OVR3041K3-H OVR3046K10-H OVR3070K3-H |
 |
|
相關產品
教育用機器人 Motion System Master
這是一套專為工職學校、高等教育機構及製造業從業人員設計的教學用機器人套件,可從機械與軟體兩個面向學習機械手臂的基本要素。
教育用機器人不僅能壓低導入機械手臂的教育成本,且無需另外教學,對於剛開始接觸機械手臂教育與學習的人來說,也能輕鬆使用。

- 價格實惠、可用於機器人教育與學習的三軸小型桌上型機械手臂。
- 可進行機構結構的學習,並可透過指令圖示進行簡易編程。
- 設置面積φ16cm、本體重量4.2kg
- 最大臂展長(水平)390mm*,可搬重量1kg,反覆定位精度±0.1mm
- *機械手臂的長度可訂製
- *新陣容產品未列在目前目錄中。
目錄修改後將會發布。