小型機器人OVR
6軸關節型機器人

- 能夠從任何角度接近負載
- 本體重量12.5 kg
- 最大伸展範圍(水平)480 mm,可搬重量1 kg
- 驅動馬達:搭載無需電池絕對式編碼器αSTEP AZ系列(DC電源輸入)
特徵 | 6軸關節型機器人
小型輕量化的設計

主機重量僅12.5 kg,需要130 x 130 mm的安裝空間。
由於易於運輸和安裝,因此可以靈活支援線上安裝和佈局變更。
由於使用DC24V電源供電,如果使用電池相容的驅動器,即可安裝在運輸機器人上。
腕軸的旋轉和彎曲以從各個角度接近
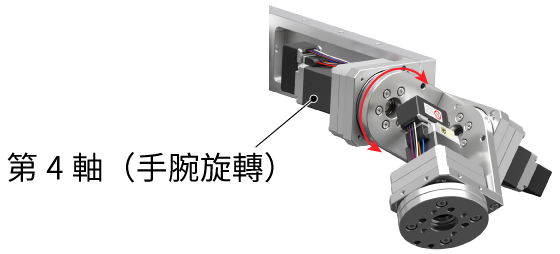
對於5軸關節型機器人,在第4軸上增加了用於手腕旋轉的馬達。
這使得手腕軸可以旋轉和彎曲以從各個角度接近。
能夠以不同角度轉移負載、在機器人前方水平轉移負載等。
可自行維護

簡單控制的機器人控制器


將機器人控制器MRC01與AZ系列驅動器(最多可搭載8軸)整合為一體的MRCU系列,追加至產品陣容。
在機器人導入時,降低編寫控制系統的技術門檻,並有助於縮短整體建置時間。
使用搭載無需電池絕對式編碼器αSTEP AZ系列
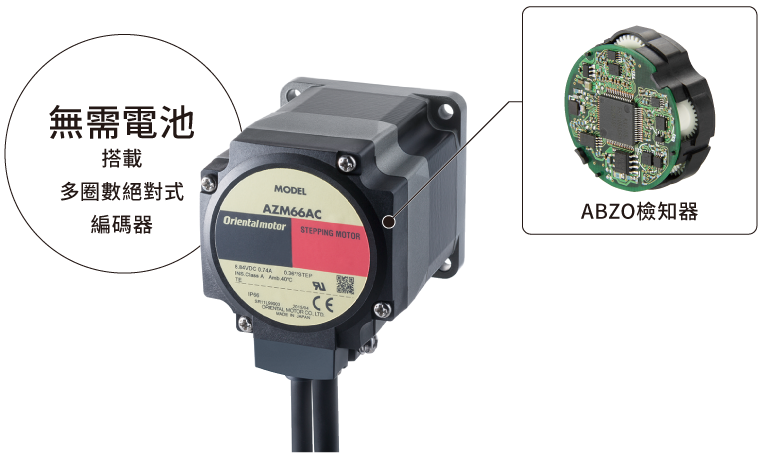
所有軸均使用αSTEP AZ系列(DC電源輸入)。
絕對式方式消除了外部檢知器的需要,減少了接線,因為無須電池、減少了維護管理的需要。
DC電源輸入使電源線佈線變得容易。可靈活應對線路安裝、佈局變化。
導入機器人前的實用工具


規格
| 品名 | OVR6048K1-V | |
|---|---|---|
| 軸數 | 6軸 | |
| 輸入電壓 | DC24V | |
| 最大範圍 | 垂直 | 735 mm(向上) |
| 橫向 | 568 mm/480 mm(向下) | |
| 可搬重量 | 1 kg | |
| 標準週期時間*1 | 0.7秒。 | |
| 可動範圍*2 | S軸(旋轉) | ±170度 |
| L軸(下臂) | -59~+108度。 | |
| U軸(上臂) | -134∼+150度。 | |
| R軸(手腕轉動) | ±180度*3 | |
| Bp軸(手腕彎曲) | -106∼+117度。 | |
| T軸(手腕旋轉) | ±180度*3 | |
| 反覆定位精度*4 | ±0.05 mm | |
| 容許慣性慣量(手腕旋轉軸) | 0.069 kgm² | |
| 本體重量 | 12.5 kg | |
| 設置形式 | 支架安裝 | |
- *1:負載1 kg時,在高25 mm、寬300 mm的 2個點之間來回移動所需的時間。
使用MRC01機器人控制器時的週期時間。 - *2:定位PIN於原點銷孔中的設置原點姿勢的操作範圍。
- *3:±170度。使用MRC01機器人控制器時。
- *4 根據各軸減速機的規格值。
- *建議電源容量為DC24V 600W
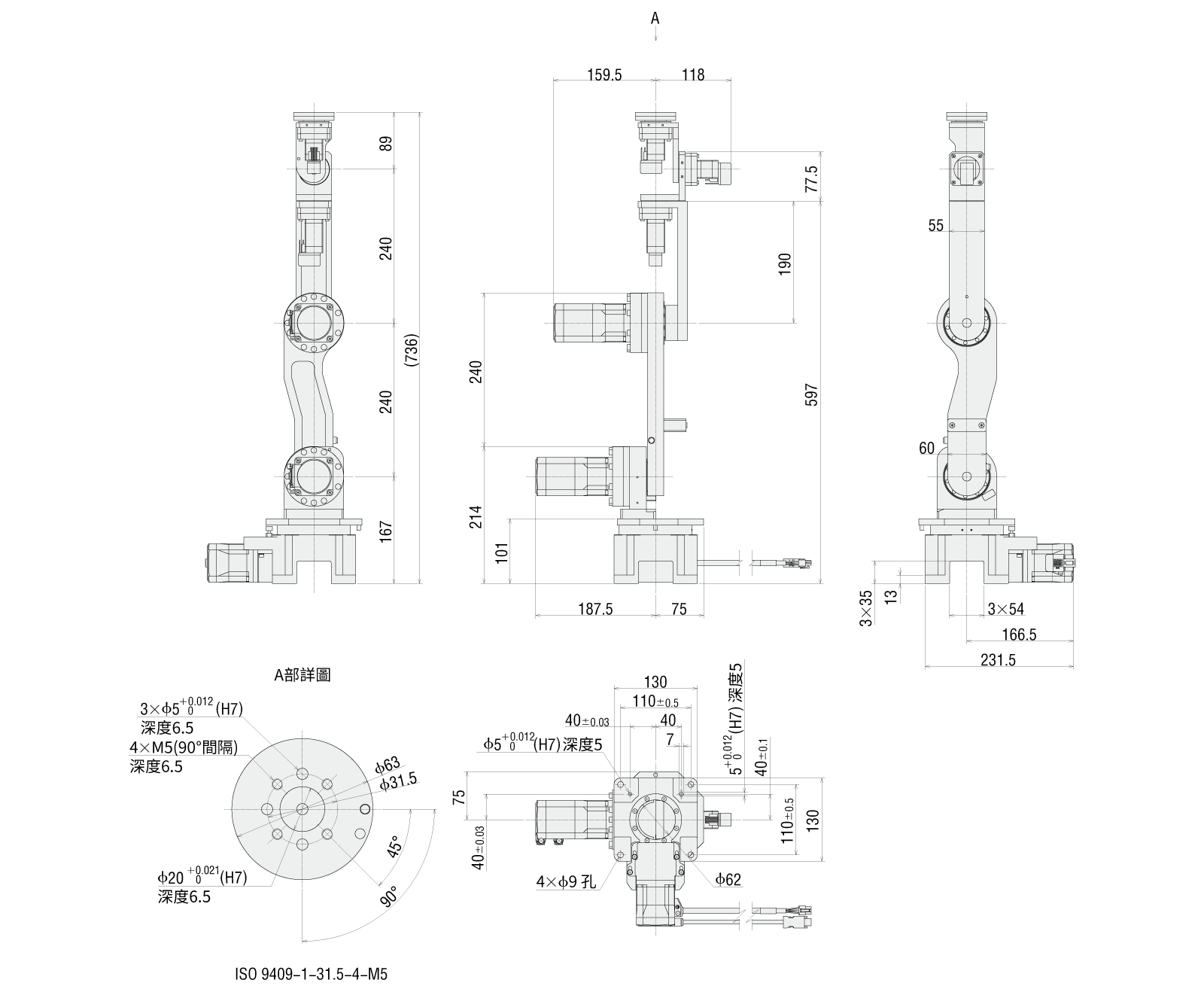
外形圖/動作範圍圖
外形圖(單位 mm)
動作範圍圖(單位 mm)
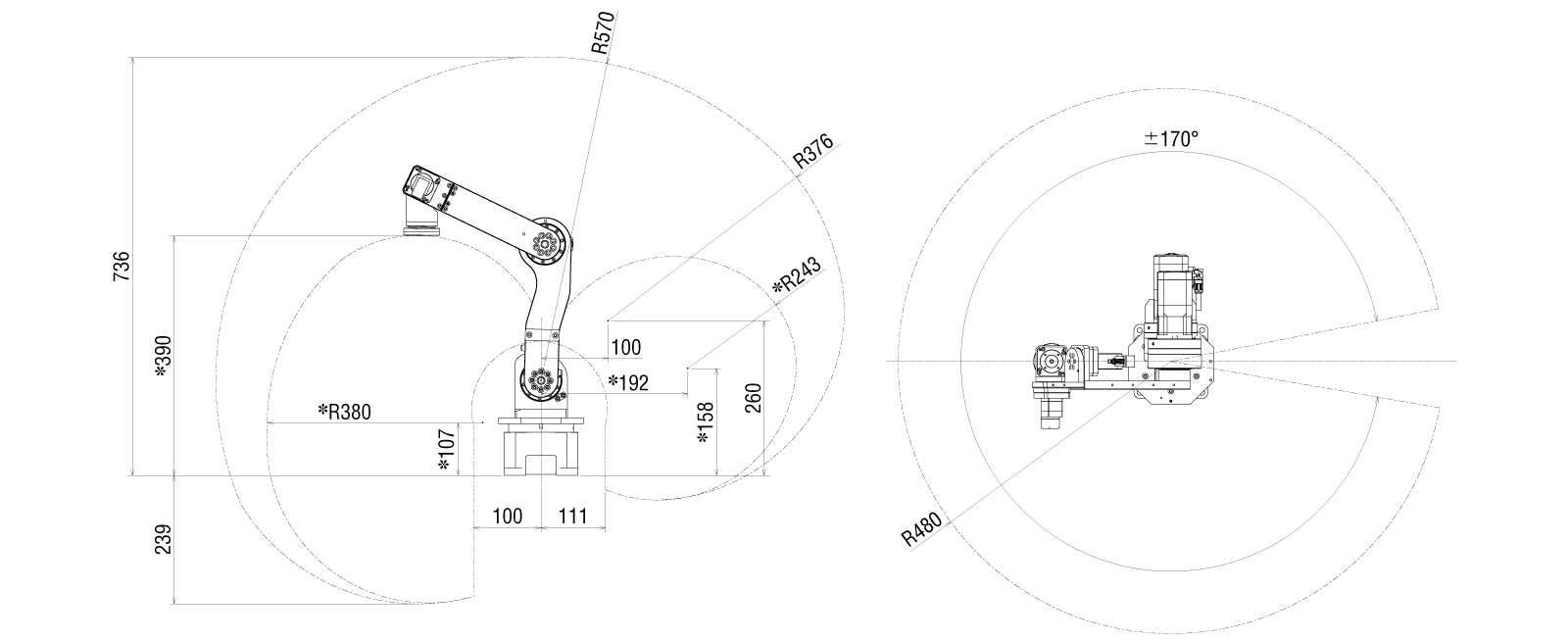
- *末端軸指向下方時可以操作的範圍。
各種資料
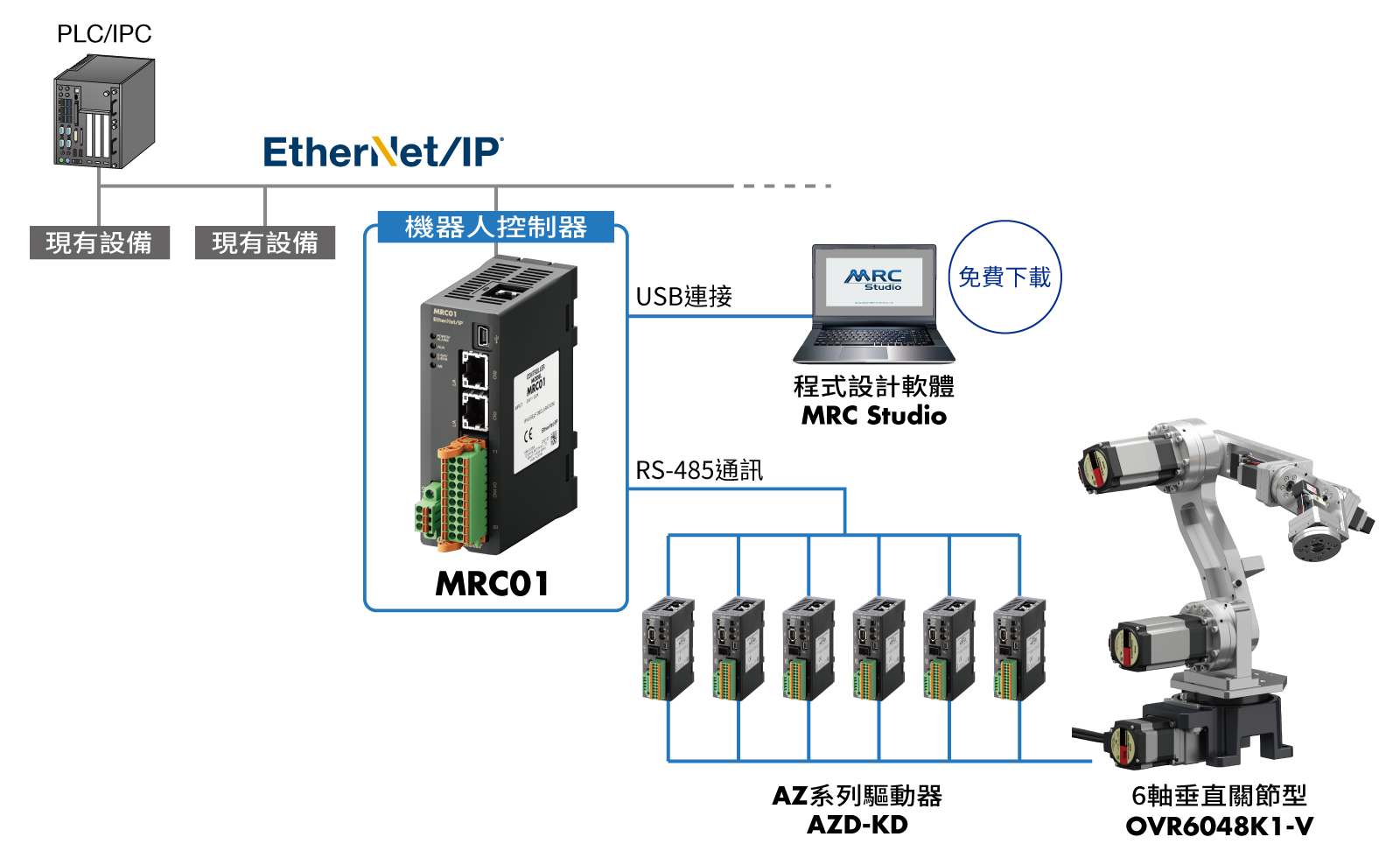
系統構成
機器人、機器人控制器、驅動器和電纜線必須各別訂購。
使用機器人控制器MRC01和程式設計軟體MRC Studio可以輕鬆控制機器人。
推薦可連接至MRC01的驅動器為DC電源輸入型驅動器AZD-KD或mini驅動器AZD-KR2D。
關聯產品
教育用機器人 Motion System Master
這是一套專為工職學校、高等教育機構及製造業從業人員設計的教學用機器人套件,可從機械與軟體兩個面向學習機械手臂的基本要素。
教育用機器人不僅能壓低導入機械手臂的教育成本,且無需另外教學,對於剛開始接觸機械手臂教育與學習的人來說,也能輕鬆使用。

- 價格實惠、可用於機器人教育與學習的三軸小型桌上型機械手臂。
- 可進行機構結構的學習,並可透過指令圖示進行簡易編程。
- 設置面積φ16cm、本體重量4.2kg
- 最大臂展長(水平)390mm*,可搬重量1kg,反覆定位精度±0.1mm
- *機械手臂的長度可訂製