機器人控制器
MRC01

- 內部機器人的輕鬆介紹與控制
- 使用程式設計軟體輕鬆設定
- 可調節垂直/水平關節型卡氏坐標型機器人
特徵 | 機器人控制器 MRC01
不曾使用PLC進行程序控制經驗的機械設計者,也能輕鬆動作
MRC01 只需使用 PC 即可輕鬆示教並檢查透過 MRC Studio 程式軟體設定的操作程序。
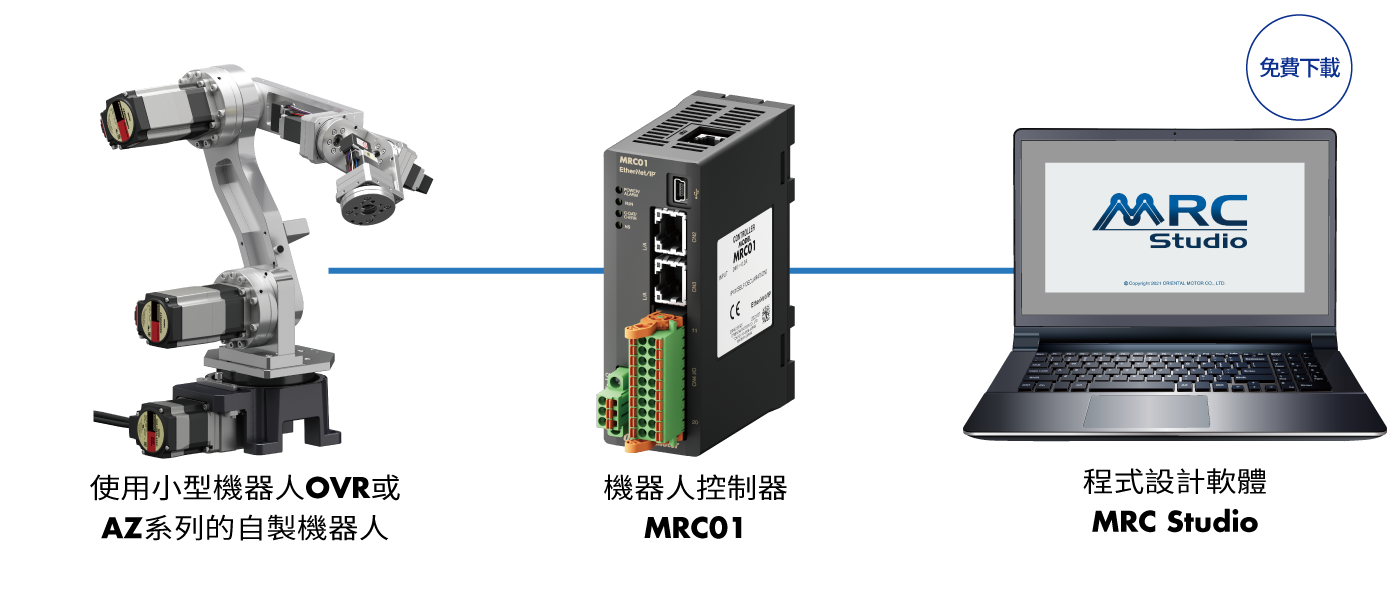
將自製手臂簡易導入至現有系統
與MRC01上位控制器的連接由EtherNet/IP™直接控制。不須大幅變更現有設備的控制系統,即可簡單新增導入自製手臂。
- * EtherNet/IP™為ODVA的商標。
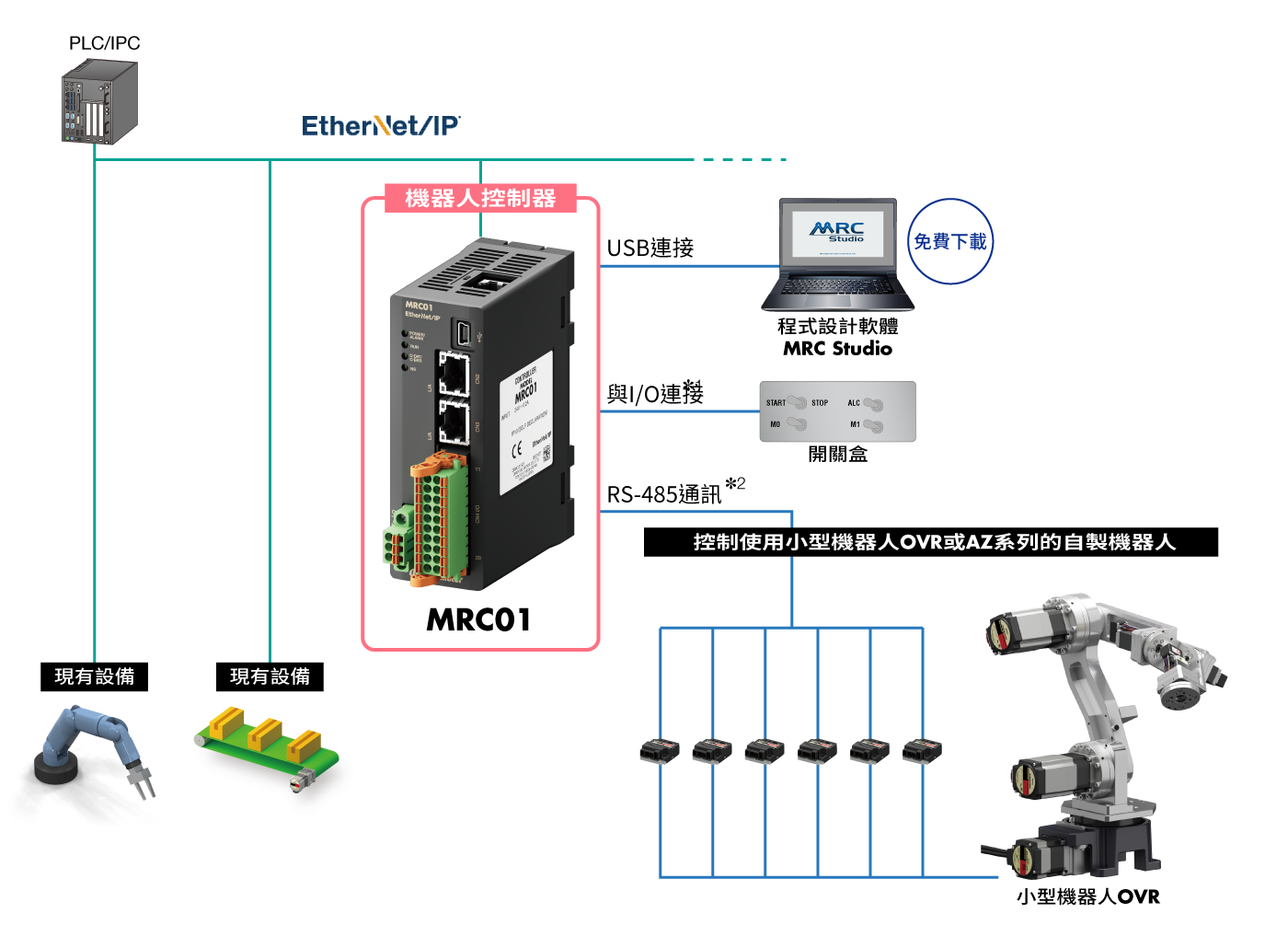
- *1
- MRC01即使連接I/O(無上位控制器)亦可操控。
- *2
- MRC01與AZ系列的驅動器間以RS-485通訊控制。
使用機器人控制器 MRC01 和編程軟體 MRC Studio 輕鬆設置
備有從自製手臂的初期設定到動作程式皆能簡單設定的「程式設計軟體 MRC Studio」。
此外,亦提供能在購買MRC01前,無須通訊即可測試操控感的程式設計軟體「MRC Studio Simulator」。在實際導入機器人時,可以直接使用透過MRC Studio Simulator建立的程式。
這兩個軟體皆可免費下載。
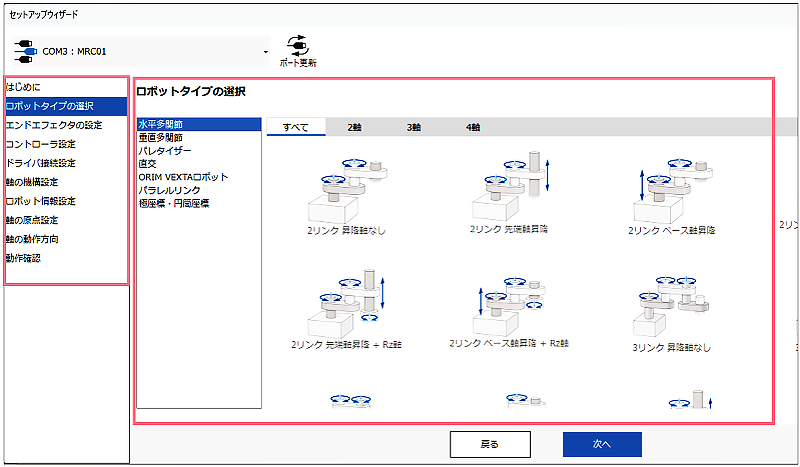
Step 1. 按照指南完成初期設定。
以設定精靈的形式執行一連串的初期設定,包括選擇機器人類型和輸入機構資訊等等。邊看插圖邊按照指南的指示進行設定,即使是第一次操作也能在短時間內完成機器人的初期設定。
按照步驟設定
建議按照精靈選單進行機器人的初期設定。
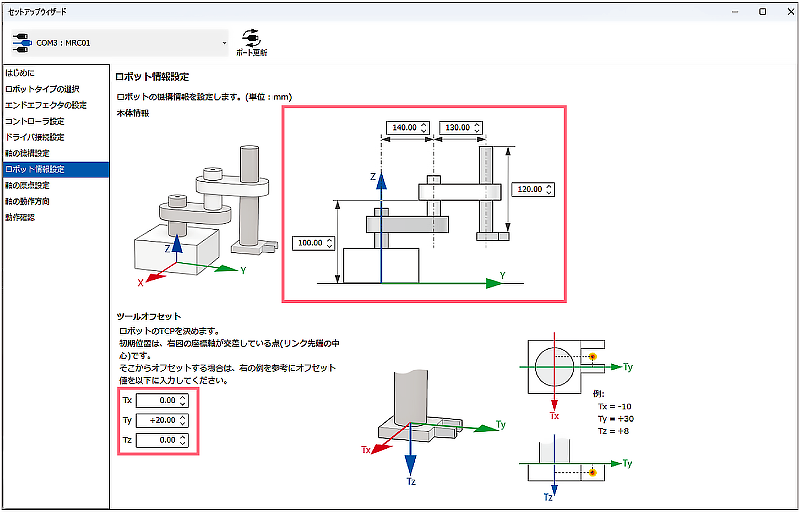
邊看機器人的插圖邊輸入機械手臂的長度等尺寸
直接在插圖內的輸入欄輸入尺寸。
選擇機器人類型
(代表例)
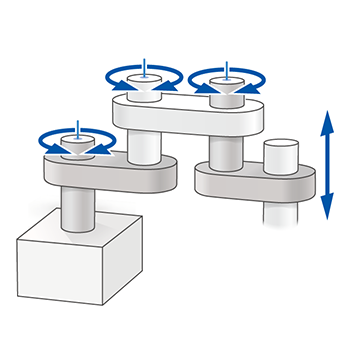
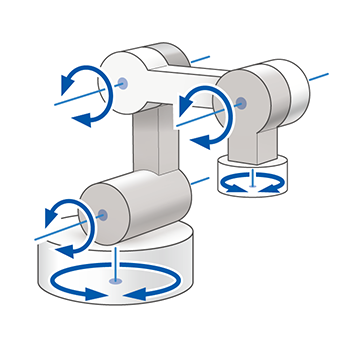
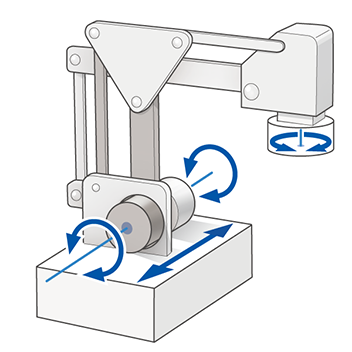
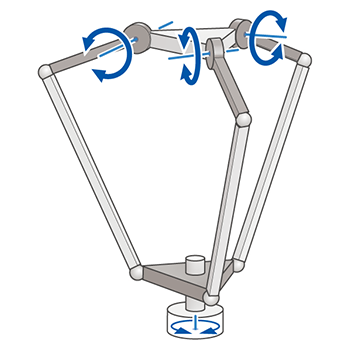
| 水平關節型(SCARA) | 關節型 | 碼垛機 | 並聯式(Delta) |
|---|---|---|---|
|
|
|
|
| 3連結 前端軸升降 | 3連結 基座軸旋轉+Rz軸 | 2連結機構 基座直線動作+Rz軸 | 並聯+Rz軸 |
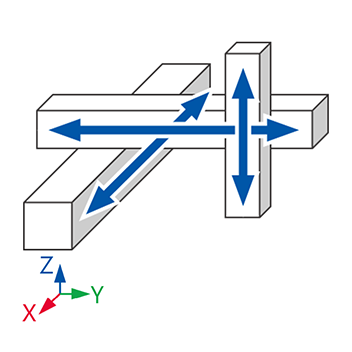
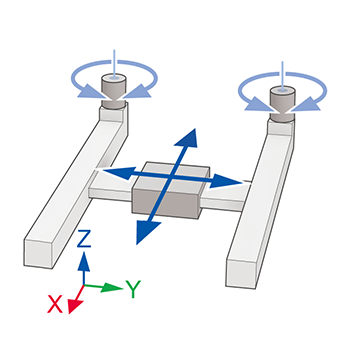
| 卡氏坐標型 | 小型機器人OVR 垂直關節型 |
小型機器人OVR 水平關節型 |
|
|---|---|---|---|
|
|

|

|
| XYZ | 平面龍門 (XY) | OVR6048K1-V(6軸) | OVR3041K3-H(3軸) |
Step 2. 不需階梯圖等相關知識。程式製作方式簡單,
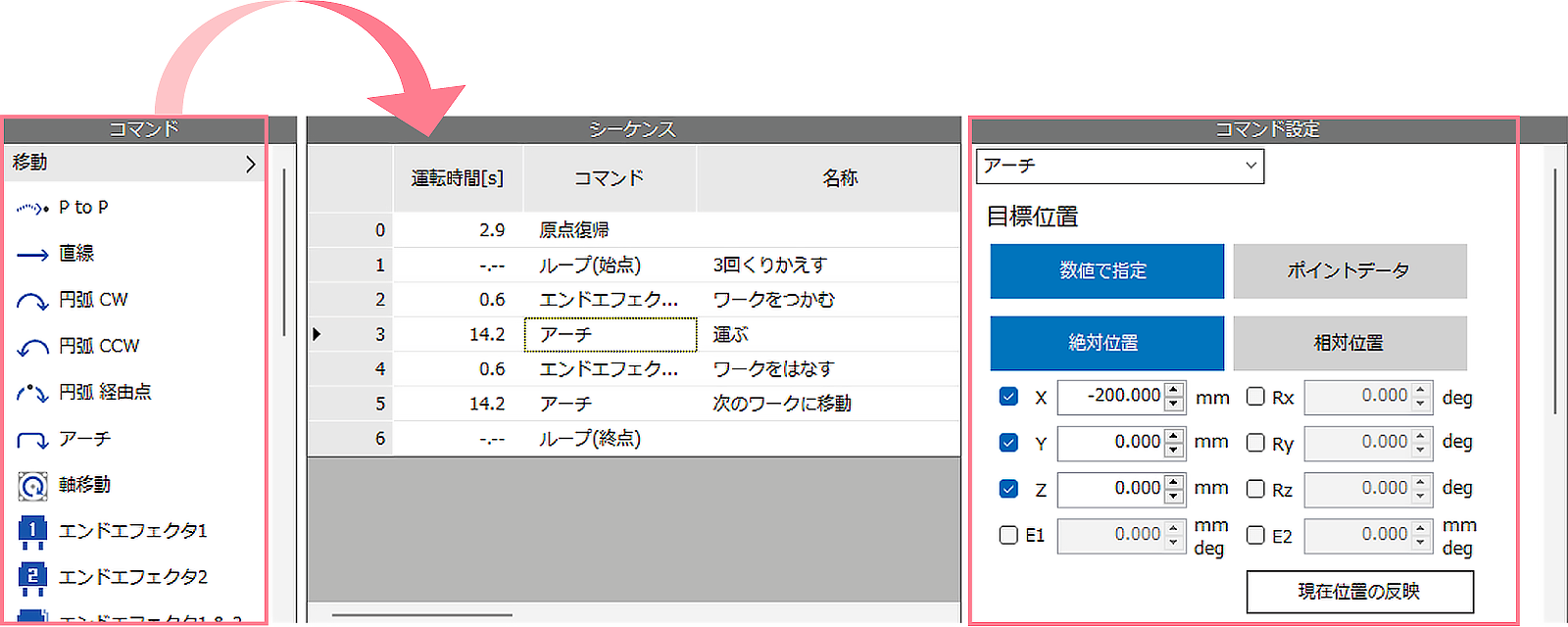
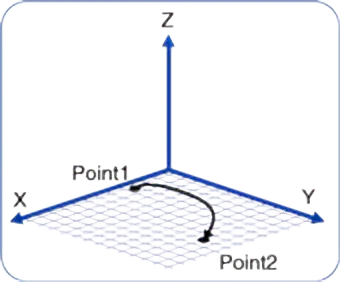
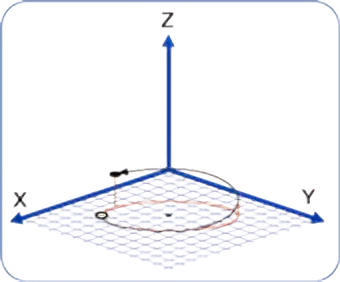
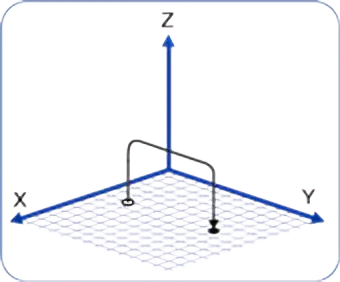
只要依序選擇命令即可。即使不具備階梯圖等專業知識,亦可直覺性製作程式。支援P to P運轉、直線補間運轉、圓弧補間運轉、拱形動作等。除此之外,亦可從上位控制機器藉由EtherNet/IP直接執行運轉資料。
拖曳需要的命令
從「命令」欄選擇需要的動作,拖曳至「程序」欄後,將顯示於「命令設定」欄。
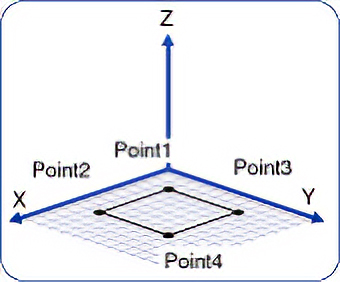
設定目標位置和速度
將目標位置座標、指定移動量、速度輸入命令設定欄內。
| 命令 | ||||
|---|---|---|---|---|
|

|
|
|
|
| P to P控制 | 直線補間 | 圓弧補間(螺旋補間) | 拱形動作 | 疊棧 |
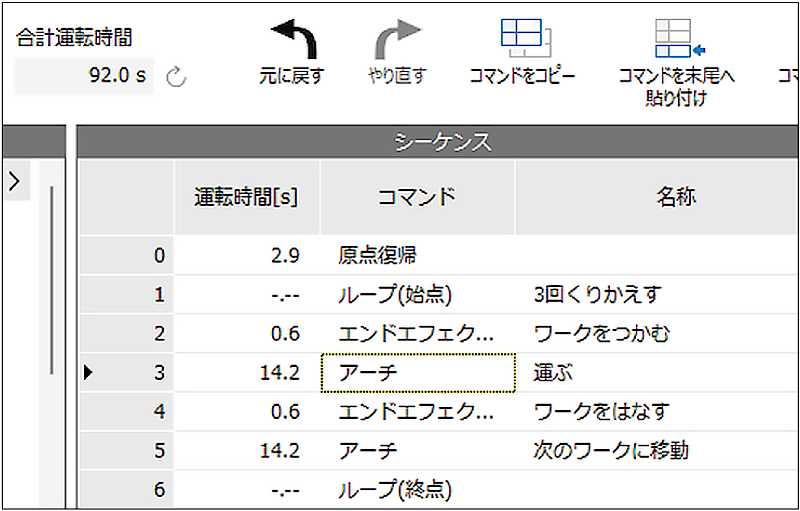
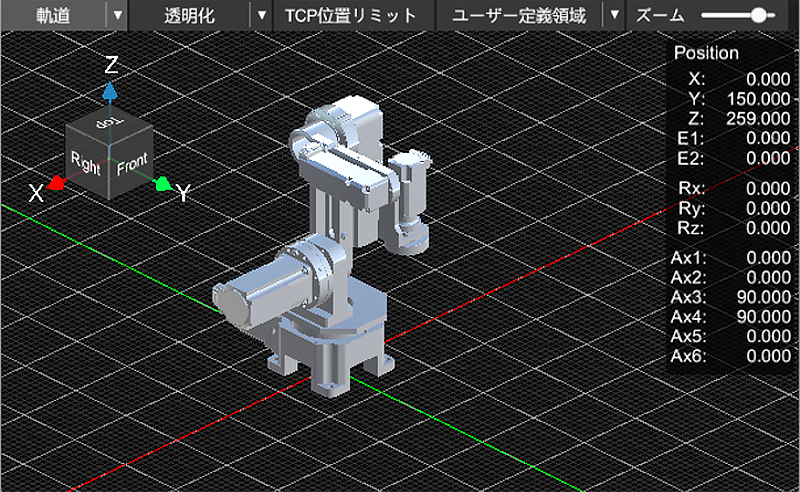
Step3. 以線上3D模擬進行動作確認。
可以顯示程式的執行時間,也可以驗證機器人的可動範圍等的程式內容。
可於3D模擬器上確認機器人的動作程式。於實機動作前可先簡單檢查程式。
- *模擬操作與實際操作可能會有差異。
- *模擬需要與MRC01通訊。
搭配2D攝影機,進一步使精密作業自動化
使用2D攝影機建構機器視覺系統
機器人控制器MRC01搭載方便的功能,可使用攝影機取得工作物位置與角度資訊,並運用該資訊來運轉機器人。
關於校正
為了與2D攝影機連接,請預先使用 MRC Studio 進行校準。只要看圖並依照畫面指示操作,即可輕鬆進行設定,減少補正工時。(最多可校正2台攝影機。)
與他牌視覺感測器或影像處理軟體的對應狀況
已確認可與MRC01結合使用的視覺感測器和影像處理軟體。
| 廠商 | 視覺感測器、影像處理軟體 | 系統構成例 |
|---|---|---|
| 基恩斯 | XG-X | ① |
| CV-X | ||
| VS-L | ② | |
| 三菱電機 | VS80 | |
| 康耐視 | In-Sight 2800M | |
| In-Sight 8000 | ||
| MVTec Software | MERLIC | ③ |
| HALCON | ||
| CKD | Facilea |
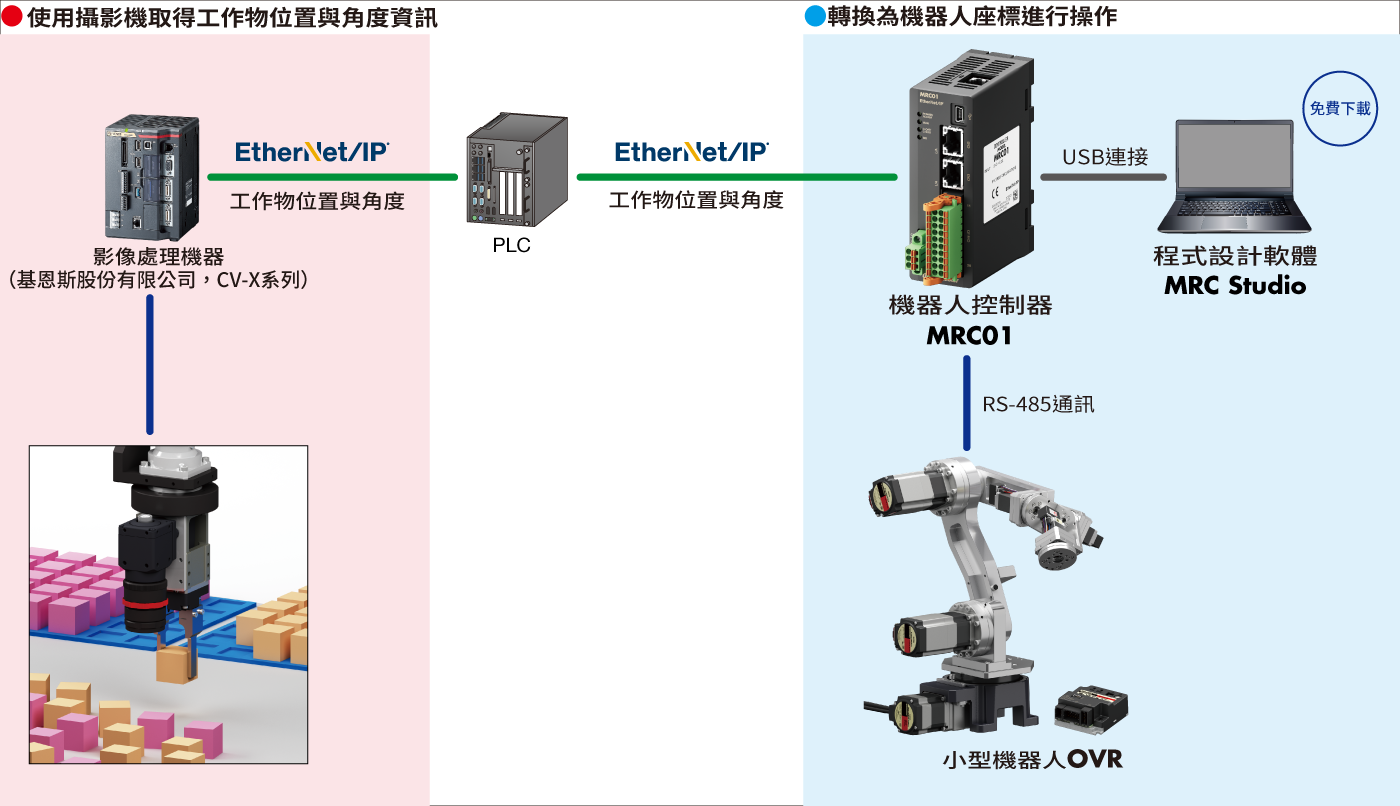
系統構成例①
機器人視覺系統的一般配置範例。
需要的機器
- 攝影機
- 攝影機控制器
- PLC
- MRC01
- 驅動器
- 機器人
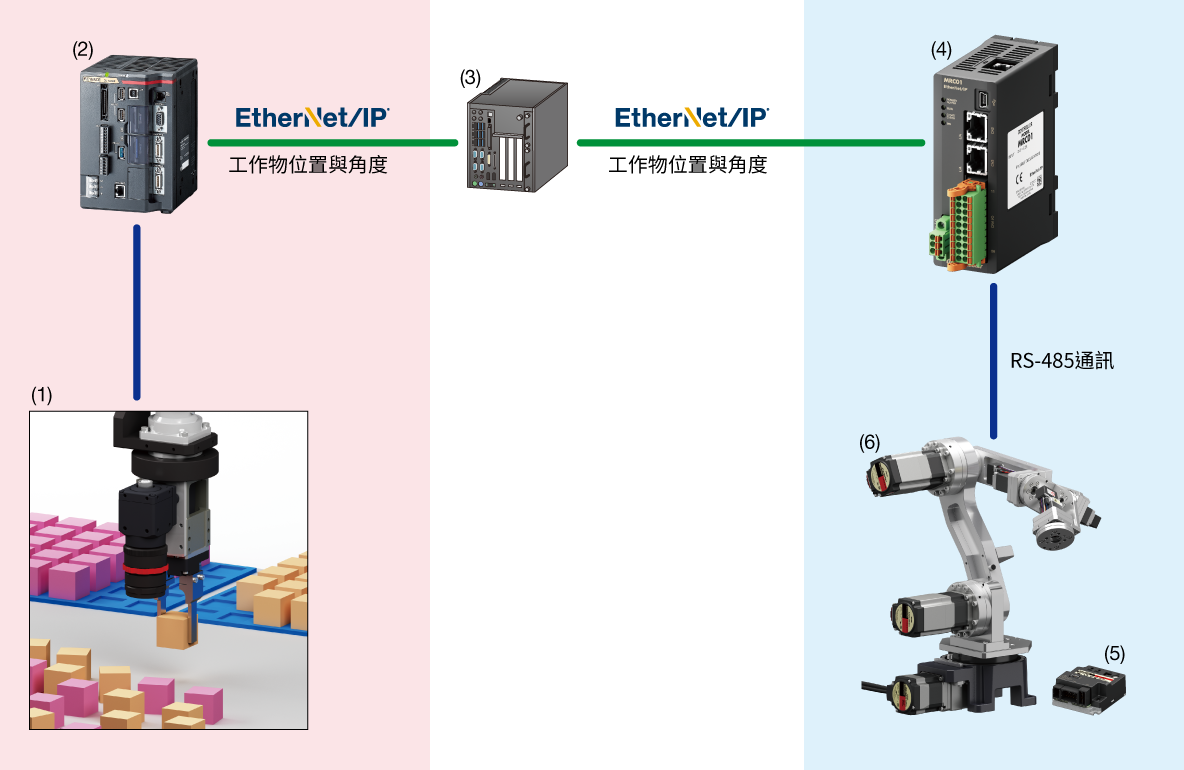
系統構成例②
攝影機控制器內建於攝影機中的構成例。
可以進行簡單的系統配置。

需要的機器
- 攝影機
- PLC
- MRC01
- 驅動器
- 機器人

系統構成例③
在PC(軟體)上執行攝影機控制器功能的配置範例。
MRC01由PC或PLC控制。
如果用PC控制,則無需PLC即可建立機器人視覺系統。
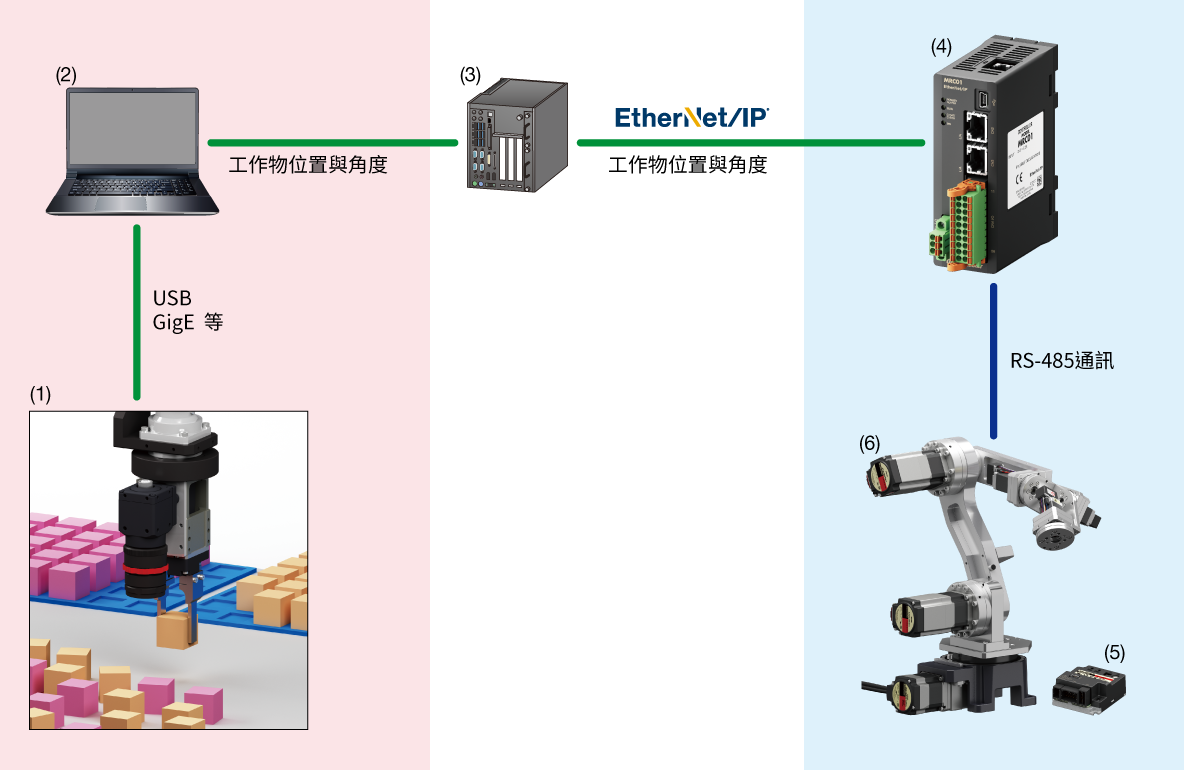
需要的機器
- 攝影機
- PC
- PLC※
- MRC01
- 驅動器
- 機器人
- ※ 請依照需求準備。

應用例
與2D攝影機配合可實現多種自動化,例如檢知工作物的位置資訊、尺寸、外觀檢查等。以下舉例介紹。
位置修正
整齊排列雜亂的工作物(固定攝影方式)
顏色識別
篩選不同顏色的工作物(Hand-Eye方式)
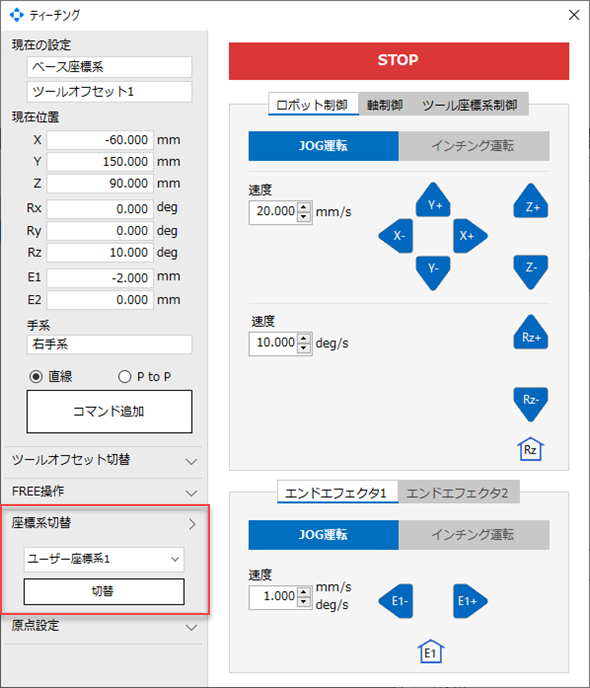
可設定多個用戶座標系(工具坐標系)
在多個作業區域反覆進行相同作業時相當有效。無須改變運轉程式,即可變更作業的起點。
從示教畫面設定座標系統
最多可以設定三個任意位置作為原點。從MRC Studio的示教畫面進行設定。
-
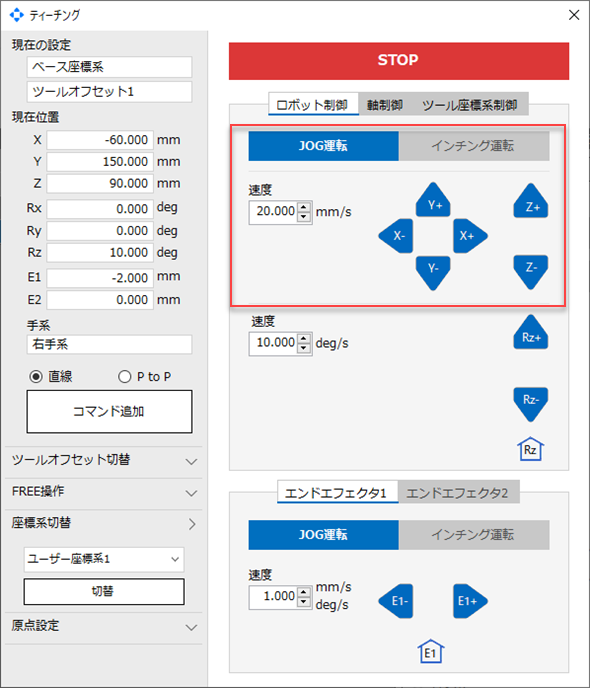
將機器人移動至設定為原點的位置 -
選擇座標系 -
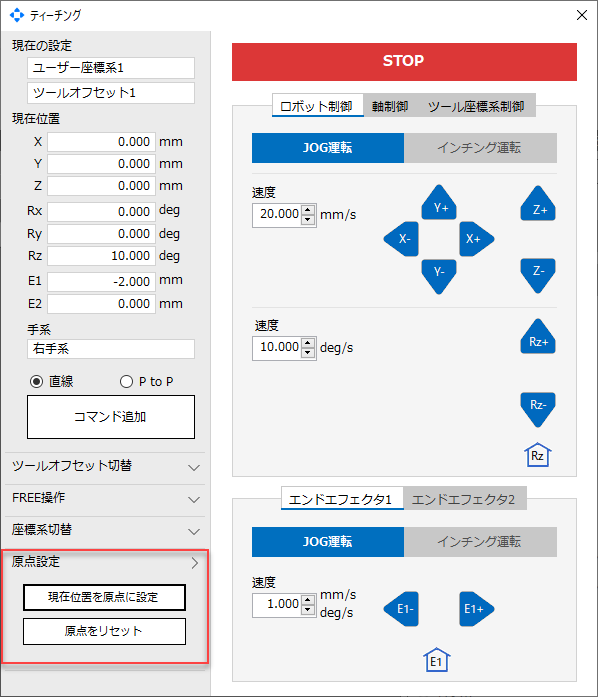
將現在位置設定為原點
可輕鬆在1組程式內切換
也可使用運轉程式的座標系統切換命令來變更座標系統。1組程式中可新增多個座標系統切換命令。
MRC Studio Simulator 在購入前的檢討階段也可先確認機器人的動作
我們提供了MRC Studio Simulator,即使沒有與機器人控制器MRC01進行通訊,也可以模擬實際動作。
在MRC Studio Simulator中創建的運行程序,可以在實際導入機器人時直接使用。

MRC Studio Simulator 和 MRC Studio(產品版)之間的差異
兩者都可以免費下載。功能上的差異如下。
| 項目 | MRC Studio Simulator | MRC Studio(產品版) |
|---|---|---|
| 與機器人控制器MRC01的通訊 | - | ○ |
| 設定 | △ | ○ |
| 無法設定與機器人控制器MRC01、或驅動程式的通訊項目。 | ||
| 將設定資料檔案保存至PC | ○ | ○ |
| 開啟檔案 | ○ | ○ |
| 可開啟.mrcx檔案。 另外提供設計軟體的範例檔案。 |
可開啟.mrcx檔案。 | |
| 匯入由MRC Studio Simulator作成的數據檔案 | - | ○* |
| 使用說明 | ○ | ○ |
| 作成運轉程式 | ○ | ○ |
| 測試運轉 | ○ | ○ |
| 參數設定 | △ | ○ |
| 部分參數無法設定。 請參閱 MRC Studio Simulator 的 [幫助]→[顯示用法] 獲取詳細信息 |
||
| 監視 | △ | ○ |
以下是可以在監視器中查看的內容:
需要與外部設備連接的信號系統訊息無法監視。 |
- *在MRC Studio Simulator中並未考量各軸的負載條件,因此實際動作可能會有所差異。
建議首次操作實機時,降低運行速率進行測試。
可與AZ系列/搭載AZ系列電動模組產品組合
可連接AZ系列以及搭載該系列的電動模組產品。
另提供搭配 AZ 系列馬達的 OVR 系列機械手臂。
小型機器人 OVR

AZ系列

電動模組產品







縮小產品範圍

