電動升降裝置
EL系列
- 擴大機器人動作範圍的升降裝置
- 縮短設備設計、組裝與啟動時間
- 高剛性、高精度
- 行程 50 / 100 / 200 / 300 mm
- 驅動馬達:搭載無需電池絕對式編碼器αSTEP AZ系列(DC電源輸入)
特徵 | 電動升降裝置 EL系列
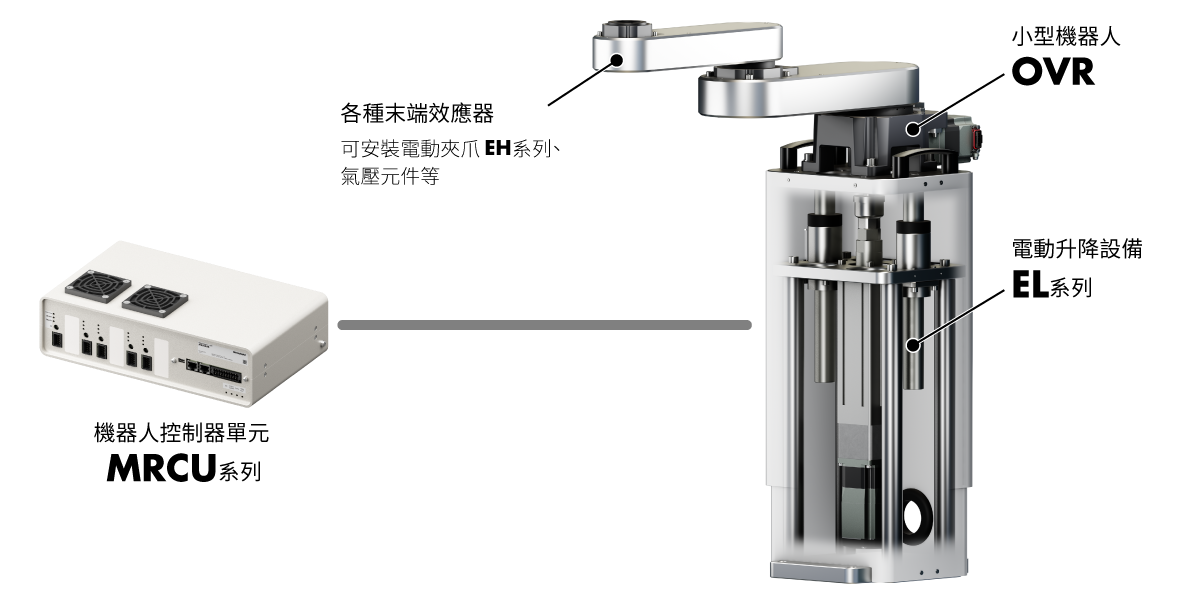
易於與小型機器人 OVR 結合使用,擴大垂直作業範圍
電動升降裝置EL系列可與機器人組合,擴大垂直方向的作業範圍。高剛性、高精度行程50~300 mm 該系列具高剛性、高精度,行程範圍為50~300 mm,建議售價(未稅)530,000 日圓起。有助於縮短設備設計、組裝與啟動時間
縮短設備設計、組裝與啟動時間
機器人和負載可以直接連接到產品本體上。無需設計外部導向機構及準備零件,有助於縮短設備啟動時間


以下是一些使用EL系列電動升降裝置的範例。
電動升降裝置 EL系列
小型機器人 OVR 3軸水平關節型機器人 + EL系列電動升降裝置 + EH系列電動夾爪
可組合小型機器人 OVR


具備電纜線收納空間
利用產品本體上部的孔,也可以將機器人電纜集中在一起,穿過電動升降裝置的內部。


單一機器人控制器可控制機器人以及最多兩個軸的周邊機器。
機器人控制器MRC01和整合機器人控制單元 MRCU 系列驅動器除了可以控制機器人之外,還可以控制最多兩個配備AZ系列的配件。
例如,當使用小型機器人 OVR、一台EH系列電動夾爪和一個電動升降裝置時,可以使用單一機器人控制器進行控制。此外,水平關節型機器人可以作為包含升降軸的機器人進行控制,因此一個機器人控制器可以控制一個 水平關節型機器人+一個電動升降裝置+最多兩個配備AZ系列的配件。
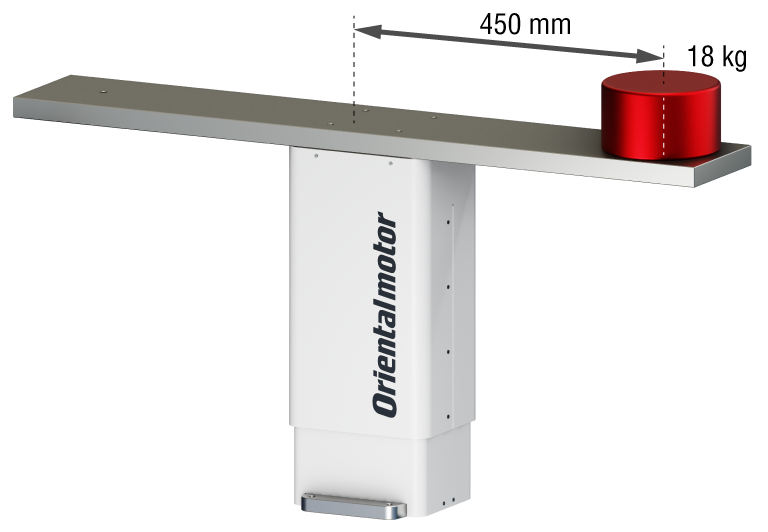
球形花鍵可實現高剛性、高精度和高容許慣量。
高剛性球形花鍵可承受高容許慣量載重。80 N·m 的容許慣量使其成為與水平關節型機器人配合使用的理想選擇。

可進行高負載的高速驅動
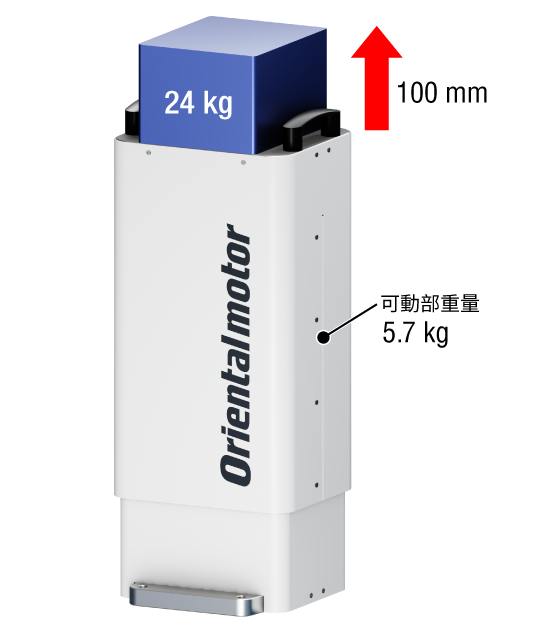
運轉例
- 搬運重量(總計):29.7 kg(5.7 kg活動部件+24 kg負載)
- 定位距離:100 mm
使用產品
- 品名:EL610AZMK
- 導程:6 mm
- 電源輸入 DC24V
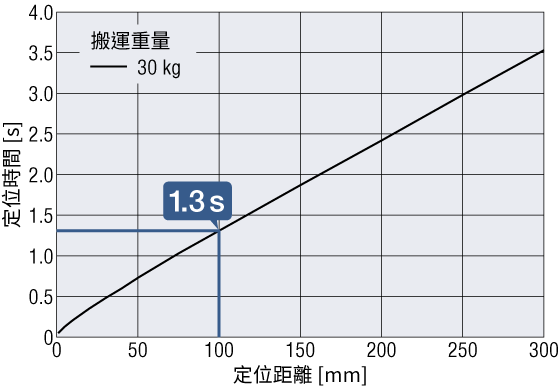
針對東方馬達電動模組的適用產品,備有可根據「品名」與「運轉條件」來計算參考定位時間的輔助工具。
- *請選擇安裝式模組產品品名(電動缸EAC系列)。
- *計算搬運重量時,應將搬運重量本身的重量加上電動升降裝置可動部的重量。
可選擇安裝方向
可提供落地式或天花板安裝,擴大了設備設計範圍。

搭載αSTEP AZ系列的優點
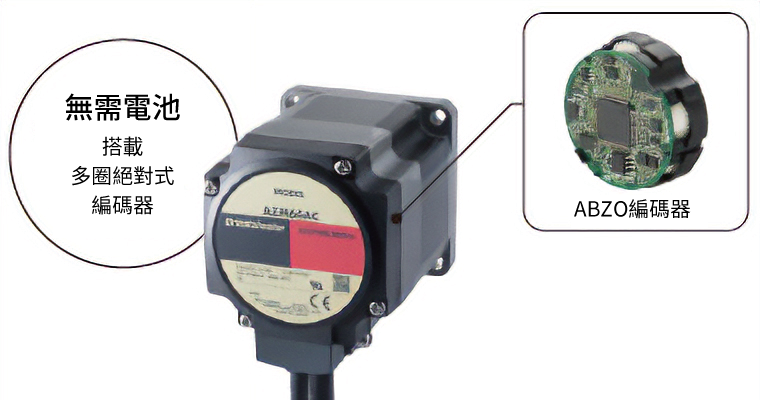
搭載絕對式編碼器(無需電池)
搭載小型的無需電池絕對式編碼器(ABZO檢知器)。可提高生產力並降低成本。
- 機構形狀檢知器
即使斷電也能保持位置訊息 - 搭載多圈數絕對式編碼器
可從標準原點檢知馬達軸±900運轉(1800運轉量)的絕對位置
無需外部檢知器
採絕對式系統,無需原點檢知器、極限檢知器。
優點
- 高速原點復歸+原點復歸精度提升
- 降低成本
- 節省配線
- 不受到外部檢知器錯誤動作的影響
無需電池
機械式檢知器無需電池。
位置資訊是利用ABZO檢知器進行機械式管理。
優點
- 不需要更換電池
- 提高驅動器設置的自由度
- 海外運送也令人安心
透過編程功能簡化主程式
AZ系列搭載連結運轉、運轉時間設定、條件分歧及Loop運轉等多種編程功能。(部分型號除外)
可使用資料設定軟體MEXE02設定,將上位控制器程式簡化。
- 定位運轉資料設定值(最大256點)
- 通用I/O信號點數(輸入10點、輸出6點)
- 通訊用I/O信號點數(輸入16點、輸出16點)
搭載AZ系列 產品種類
因為搭載的馬達相同,驅動方式與維修方法相同。
電動模組產品 (搭載AZ系列)
| 電動滑台 | 電動缸 | 小型電動缸 | 齒條・齒輪系統 | 電動夾爪 | 中空旋轉平台 | 電動升降裝置 |
|---|---|---|---|---|---|---|
| EAS系列 EZS系列 EZSH系列 |
EAC系列 | DR系列 DRS2系列 |
L系列 LJ直線減速機 AZ系列組合* |
EH系列 | DGⅡ系列 | EL系列 |
- 不同系列所配備馬達的電源輸入有所不同。詳細的產品種類請請參閱各系列的產品陣容。
- *關於LJ直線減速機,請另外購買AZ系列並組裝後使用。
驅動器類型
可用驅動器
此系列產品適用於多種介面。


- *若要透過CC-Link或MECHATROLINK進行控制,內建內藏定位功能型及RS-485 通訊型必須另行選購網路轉換器(Gateway)。
使用支援軟體MEXE02從電腦簡單驅動
透過使用支援軟體MEXE02,除了可進行運轉資料或各種參數設定、編輯之外,還可示教、監視各種狀態。
透過各種功能,從起動到維修全面支援
-
起動和評估
備有可助於配線檢查或測試運轉的功能。
- 運轉資料的設定及儲存
- I/O監視
- 示教・遙控運轉
-
調整
安裝設備後,有助於馬達動作調整的功能。
- 波形監視
-
診斷、維修
備有開始運用後有助於發生問題時進行診斷或維修功能。
- Alarm監視
- 組合資訊監視
- 狀態監視
-
運轉資料/參數設定畫面 -
波形監視
詳細產品信息
如需查看規格、特性、外形圖、CAD、使用說明書等詳細產品信息,請點擊下方的產品名稱連結。
| 導程(mm) | 行程(mm) | 品名 |
|---|---|---|
| 12 | 50 | EL1205AZMK |
| 100 | EL1210AZMK | |
| 200 | EL1220AZMK | |
| 300 | EL1230AZMK | |
| 6 | 50 | EL605AZMK |
| 100 | EL610AZMK | |
| 200 | EL620AZMK | |
| 300 | EL630AZMK |
相關產品 小型機器人 OVR
簡單、小巧、輕量的工業機器人,由αSTEP AZ系列馬達搭載無需電池絕對式編碼器組成。
透過直觀操作的機器人控制器MRC01進行控制,能以較低的負擔實現多軸機器人的自動化。
部分馬達可由客戶自行更換,從而降低維護成本。
- ·若要驅動機器人,必須另外搭配符合馬達軸數的驅動器與機器人控制器MRC01。

3軸水平關節型機器人
最大可搬重量:10 kg
最大臂展長:410 mm、460 mm與70 mm型
- 能夠接近狹窄空間的扁平式水平關節型機器人
- 本體重量7.6~8.9 kg

4軸關節型機器人
最大可搬重量:5公斤
最大臂展長(水平):480 mm、680 mm、880 mm型
- 保持水平狀態,穩定輸送工件。
- 本體重量 16.5 kg、17.4 kg、26.9 kg