AC馬達用
(1)驅動機構規格及使用條件
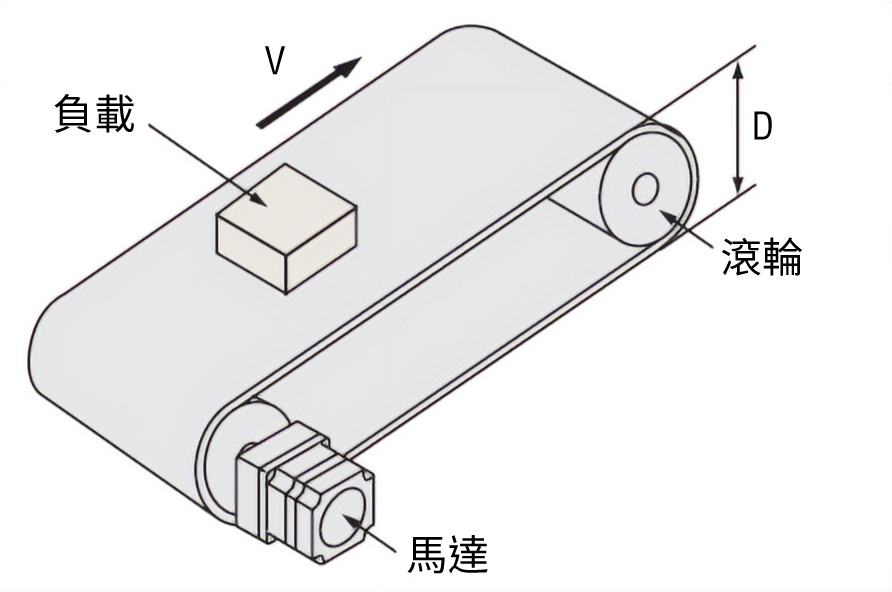
以下是如何選用感應馬達來驅動皮帶輸送機的範例:
必須選用滿足以下要求規格的馬達。
- 皮帶和負載的總重量
-
m1=25[kg]
- 外力
-
FA
=0[N]
- 滑動面摩擦係數
-
μ = 0.3
- 滾筒直徑
-
D=90[mm]
- 滾輪重量
-
m2 = 1 [kg]
- 皮帶和滾筒效率
-
η = 0.9
- 皮帶轉速
-
V=180[mm/s]±10%
- 馬達電源用
- 單相AC100V 50Hz
- 運行時間
- 每天運作8小時
(2)確定減速機的減速比
\(\begin{align}
\text{減速機出力軸的旋轉速度}\ N_G
&=\frac{V \cdot 60}{\pi \cdot D} \\[5pt]
&= \frac{(180 \pm 18) \times 60}{\pi \times 90}\\[ 5pt]
&= 38.2 \pm 3.8\ [ \mathrm{r/min}]\end{align}\)
由於感應馬達(4極)在50Hz時的額定轉速為1200~1300[r/min],因此請在此範圍內選用減速機減速比。
\(\begin{align}
\text{減速機減速比}\ i &=\frac{1200\text{~}1300}{N_G} \\[5pt]
&= \frac{1200\text{~}1300}{38.2 \pm 3.8}\\[5pt] &= \ 28.6\text{~}37.8
\end{align}\)
在此範圍內選用i=36的減速比。
(3)計算所需轉矩TM[N·m]
\(\begin{align}\text{滑動面的摩擦力}F & = F_A+m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 0 + 25 \times \ 9.807 \ (\sin 0^{\circ}+\ 0.3 \cos 0^{\circ})\\[ 5pt ]
& = 73.6\ [\mathrm{N}]\end{align}\)
\(\begin{align} \text{負載轉矩}{T'}_L & =\frac{{F} \cdot {D}}{2 \cdot \eta} \\[ 5pt ]
& =\frac{73.6 \times 90 \times 10^{-3}}{2 \times 0.9} \\[ 5pt ]
& = 3.68\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
考慮安全因素Sf=2。
\(\begin{align} T_L = {T'}_L \cdot Sf = 3.68 \times 2 = 7.36 \ [\mathrm{N}\cdot \mathrm{m}]\end{align}\)
根據計算結果(減速比i=36,負載轉矩TL =7.36[N·m])為條件,選用滿足減速機容許轉矩的減速機和感應馬達。
參考規格分別暫定馬達5IK40GN-AW2J和減速機5GN36K。
將此負載轉矩轉換為馬達出力軸上的值以獲得所需轉矩TM。
\(\begin{align} T_M &= \frac{T_L}{i \cdot \eta_G}\\[5pt]
&= \frac{7.36}{36 \times 0.73}\\[5pt]
&= 0.280 \ [\mathrm{N}\cdot \mathrm{m}]\\[5pt]
&= 280 \ [\mathrm{mN}\cdot \mathrm{m}] \end{align}\)
(減速機傳動效率5GN36K ηG =0.73)
先前選定的起動轉矩5IK40GN-AW2J馬達為200[mN·m],不滿足所需轉矩。
因此,參考規格書,暫定選用馬達5IK60GE-AW2U,和減速機5GE36S。在這種情況,公式如下。
\(\begin{align} T_M &= \frac{T_L}{i \cdot \eta_G}\\[5pt]
&= \frac{7.36}{36 \times 0.66}\\[5pt]
&= 0.31 \ [\mathrm{N}\cdot \mathrm{m}]\\[5pt]
&= 310 \ [\mathrm{mN}\cdot \mathrm{m}] \end{align}\)
(減速機傳動效率5GE36S ηG=0.66)
的起動轉矩5IK60GE-AW2J馬達為320[mN·m],滿足310[mN·m]的要求轉矩。
(4)檢查負載慣性慣量J[kg·m2]
皮帶和負載慣性慣量
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 25 \times \left( \frac{\pi \times 90 \times 10^{-3}}{2 \pi} \right)^2 \\[ 5pt ]
& = 507 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
滾筒慣性慣量
\(\begin{align} {J_m}_2 & = \frac{1}{8} \cdot m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 1 \times \left(90 \times 10^{-3} \right)^2 \\[ 5pt ]
& = 10.2 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
計算減速機出力軸的負載慣性慣量J。
考慮到有2個滾輪(Jm2)。
\(\begin{align} J & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 507 \times 10^{-4} + 10.2\times 10^{-4} \times 2 \\[ 5pt ]
& = 528 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
減速機5GE36S(減速比36)的容許負載慣性慣量JG由下列公式給出。
\(\begin{align} J_G & = 1.1 \times 10^{-4} \times 36^2 \\[ 5pt ]
& = 1425 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
J<JG,負載慣性慣量小於允許值,沒有問題。由於所選馬達的額定轉矩為490[mN·m],大於實際負載轉矩,因此馬達將以高於額定轉速的轉速運轉。
因此,請使用無負載轉速(約1470r/min)來計算皮帶速度,並確認所選產品是否符合規格。
\(\begin{align}V &= \frac{N_M \cdot \pi \cdot D}{60 \cdot i}\\[5pt] &= \frac{1470 \times \pi \times 90}{60 \times 36}\\[5pt] &= 192\ [\mathrm{mm} / \mathrm{s}] \quad\quad N_M: \text{馬達旋轉速度}\end{align}\)
證實了馬達符合規格。
基於以上所述,分別選用馬達5IK60GE-AW2J,和減速機5GE36S。
超低速同步馬達SMK系列用
(1)驅動機構規格及使用條件
選用可以驅動的搬運重量SMK237A-A當圖1所示的皮帶傳動工作台以圖1所示的運轉模式驅動時,馬達的工作狀態如圖2所示。
- 皮帶和負載的總重量
-
m1=1[kg]
- 滾筒直徑
-
D=30[mm]
- 滾輪重量
-
m2=0.1[kg]
- 滑動面摩擦係數
-
μ=0.04
- 皮帶和滾筒效率
-
η=0.9
- 電源電壓
- 50Hz(轉速:60r/min)
超低速同步馬達2相步進馬達的基本原理相同。因此,轉矩計算方式與2相步進馬達相同。
(4)計算負載慣性慣量JL[kg·m2]
皮帶和負載慣性慣量
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 1 \times \left( \frac{\pi \times 30 \times 10^{-3}}{2 \pi} \right)^2 \\[ 5pt ]
& = 2.25 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
滾筒慣性慣量
\(\begin{align} {J_m}_2 & = \frac{1}{8} m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 0.1 \times \left(30 \times 10^{-3} \right)^2 \\[ 5pt ]
& = 0.113 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
計算負載慣性慣量JL。
考慮到有2個滾輪(Jm2)。
\(\begin{align} J_L & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 2.25 \times 10^{-4} + 0.113 \times 10^{-4} \times 2 \\[ 5pt ]
& = 2.48 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
(7)選用馬達
選用既滿足所需操作轉矩又滿足容許負載慣性慣量的馬達。
| 品名 |
轉子慣性慣量
[kg·m2] |
容許負載慣性慣量
[kg·m2] |
輸出轉矩
[N·m] |
|
SMK237A-A
|
0.3×10-4
|
2.5×10-4
|
0.37 |
當以轉子慣性慣量代入計算所需轉矩,所得的值為TM=0.362[N·m],低於輸出轉矩。接下來,檢查容許負載慣性慣量。由於(4)計算出的負載慣性慣量也低於容許負載慣性慣量,SMK237A-A可以使用。
(2)確定使用的轉速範圍
\(\begin{align}N_G = \frac{60 \cdot V_L}{\pi \cdot D} \quad\quad N_G:\text{齒輪軸轉速}
\end{align}\)
根據皮帶速度計算滾筒轉速。
\(\begin{align} &0.05[\mathrm{m} / \mathrm{s} ] \cdots \ \frac{60 \times 0.05}{\pi \times 0.1} = 9.55 [\mathrm{r} / \mathrm{min} ] \left(\text{最低旋轉速度} \right)\\[5pt]
& 1 [\mathrm{m} / \mathrm{s} ] \cdots\cdots \frac{60 \times 1}{\pi \times 0.1} = 191 [\mathrm{r} / \mathrm{min} ] \left(\text{最高旋轉速度} \right)
\end{align}\)
減速機減速比在5.4至266的速度範圍內選用「15」,確保最小和最大轉速在規格表的速度範圍內。
(3)計算負載慣性慣量JG[kg·m2]
皮帶和負載慣性慣量
\(\begin{align} {J_m}_1 & = m_1 \left( \frac{{\pi} \cdot {D}}{2 \pi} \right)^2 \\[ 5pt ]
& = 7 \times \left( \frac{\pi \times 0.1}{2 \pi} \right)^2 \\[ 5pt ]
& = 175 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
滾筒慣性慣量
\(\begin{align} {J_m}_2 & = \frac{1}{8} \cdot m_2 \cdot D^2 \\[ 5pt ]
& = \frac{1}{8} \times 1 \times 0.1^2 \\[ 5pt ]
& = 12.5 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
計算負載慣性慣量JG。
考慮到有2個滾輪(Jm2)。
\(\begin{align} J_G & = {J_m}_1 + 2 {J_m}_2 \\[ 5pt ]
& = 175 \times 10^{-4} + 12.5 \times 10^{-4} \times 2 \\[ 5pt ]
& = 200 \times 10^{-4}\ [\mathrm{kg} \cdot \mathrm{m}^2]\end{align}\)
由規格表可知,輸出功率120W、減速比15時的容許負載慣性慣量為225×10−4[kg·m2]。
(4)計算負載轉矩TL[N·m]
\(\begin{align}\text{滑動面的摩擦力}F & = F_A + m \cdot g\ (\sin \theta+\mu \cdot \cos \theta)\\[ 5pt ]
& = 0 + 7 \times \ 9.807 \ (\sin 0^{\circ}+\ 0.3 \times \cos 0^{\circ})\\[ 5pt ]
& = 20.6 \ [\mathrm{N}]\end{align}\)
\(\begin{align} \text{負載轉矩}T_L & =\frac{{F} \cdot {D}}{2 \cdot \eta} \\[ 5pt ]
& =\frac{20.6 \times 0.1}{2 \times 0.9} \\[ 5pt ]
& = 1.15\ [\mathrm{N} \cdot \mathrm{m}]\end{align}\)
從規格表中選用輸出功率為120W、減速比為15的無刷馬達。
由於容許轉矩為5.2[N·m],因此安全係數為TM/TL=5.2/1.15≒4.5。
馬達可以在1.5∼2以上的安全係數下運作。