搬運機器人的解決方案提案

目前,所有的產業都面臨少子化、高齡化導致的勞動力不足及為防止感染新冠肺炎的非接觸化課題。在此背景環境下,對於相對較單純的「運送物品作業」,其趨勢正加速推動自動化及節省人力。目前推動的解決方案為導入搬運機器人(AGV/AMR/GTP*)。
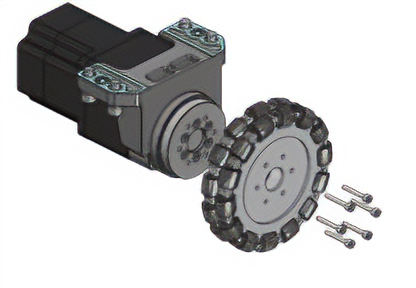
無刷馬達BLV/BLH系列可使用電池驅動,適合使用於搬運機器人的輪軸或搭載的搬運設備上。
有助於對應各種場景下的多樣化行走模式及搬運物。
- *AGV: Automatic Guided Vehicle、AMR: Autonomous Mobile Robot、GTP: Goods To Person
低底盤、薄型設計:不受包裝型態或場所限制的車體
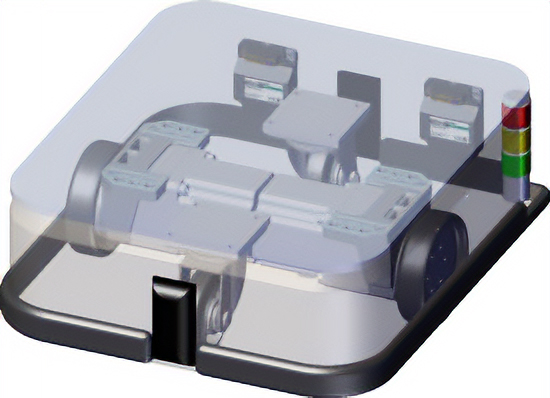
能遁入棚架或籠車下方自動搬運:低底盤設計
低底盤型的搬運機器人能遁入產品、零件棚架或籠車下方,並將其抬起(或夾住),有助於搬運作業自動化。可選擇將馬達安裝於頂面或側面,提高設計的自由度,有助於低底盤設計。
-
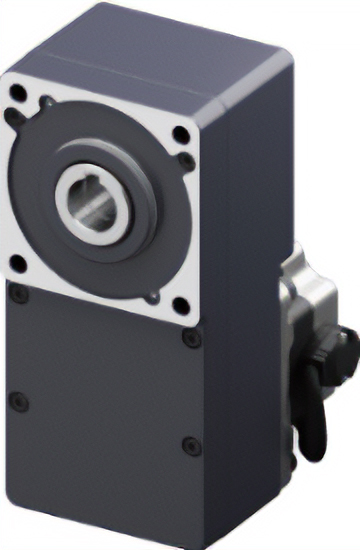
天面安裝 法蘭輸出頭

-
側面安裝 中空軸扁平式減速機

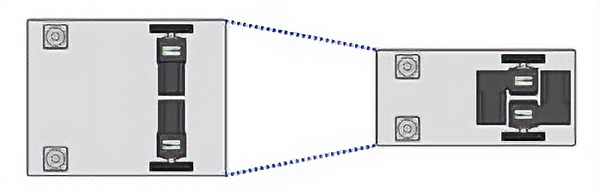
狹窄的通路也能會車通行:薄型化
將中空軸扁平式減速機交錯配置以縮短輪距,可抑制車寬實現薄型設計。透過此設計,即使通道狹窄也能會車通行,減少搬運機器人的待機時間,提高運作效率。
更進一步低底盤、薄型化
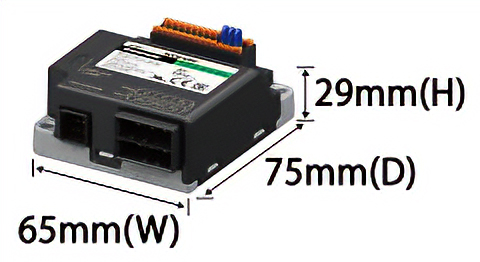
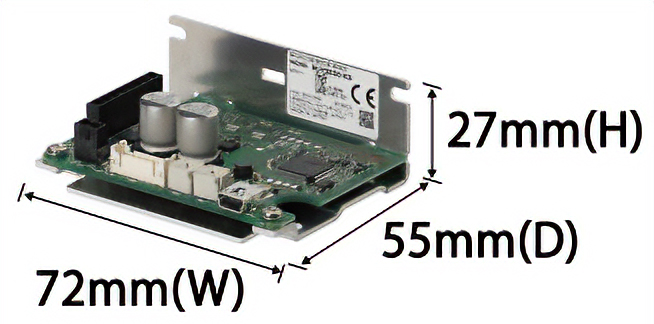
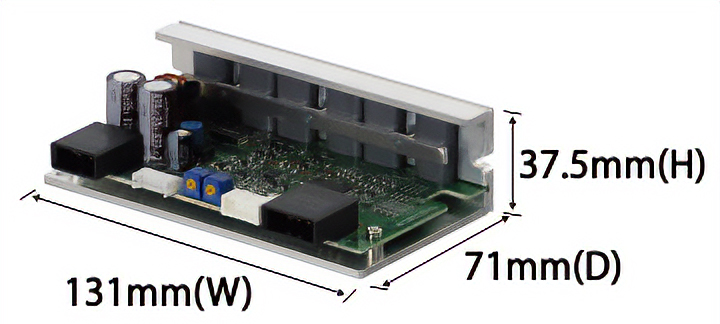
小型、薄型驅動器
由於尺寸輕巧,電池或控制機器的設置場所等配置自由度提高。
-
BLV系列 R型
60 W, 100 W,
200 W, 400 W -
BLH系列
15 W, 30 W, 50 W -
100 W -
電子剎車 *
停止時電子剎車能保持停止位置,不需要機械剎車(電磁剎車)。馬達總長較短,設計時可減少車寬。
- ※ 僅通電時有效。
高耐載重性能:對應工作物大型化、搭載機器人及輸送帶
搬運機器人的耐載重性能會影響懸吊載重。組裝法蘭輸出頭時為1500N(153kgf),中空軸扁平式減速機時最大2040N(208kgf),強度提高。藉此支援工作物大型化、搭載機器人及輸送帶等需求。
| 減速比 | 5 | 10 | 15 | 20 | 30 | 50 | 100 | 200 | |
|---|---|---|---|---|---|---|---|---|---|
| 法蘭輸出頭組裝時 | 100 W*1 | 1500 | |||||||
| 中空軸扁平式減速機 | 200 W, 400 W*2 |
1230 | 1680 | 2040 | |||||
| 100 W | 900 | 1300 | 1500 | ||||||
| 50 W, 60 W |
800 | 1200 | |||||||
| 30 W | 450 | 500 | |||||||
- *1
- 馬達軸轉速為~300r/min的值
- *2
- 馬達軸轉速為100~3000r/min為止的值

停止位置的設定、微調整:與前後製程順利連動
設定指定位置起的剩餘移動距離:位置控制
可如同步進馬達或伺服馬達一般,設定移動量。除了依照事先設定的距離在導軌搬運外,自律行走中也能實施設定檢知器輸入位置到目標停止位置距離的部分定位運轉。

微調整停止位置:速度控制
馬達軸轉速可由1r/min開始設定。若車輪直徑為100mm時,換算為搬運速度,約為0.01m/min。由於速度非常低,過轉較小,可微調整停止位置。
此外,最高轉速為4000r/min,有助於提高搬運速度,縮短生產節拍。

固定車輛使移載作業安定化
搭載機械剎車(電磁剎車)或電子剎車,停止時能固定車輛。可抑制移載時或傾斜時的車輛偏移,以求作業安定化。


筆直行走、迴避、停止:彈性調整搬運機器人的行走
依照地板的狀態或迴避突發性的障礙物,搬運機器人必須具備能對應各種變化的行走性能。為了能順暢地執行馬達發出的回授信號及各軸相應的指令,必須能彈性調整筆直行走、迴避、停止。
搭載高解析度檢知器
檢知器的控制解析度為最大36,000P/R。可詳細掌握行走狀態及現在位置。
直接資料運轉
可依據運轉中緊急剎車、速度復歸等透過檢知器得到的資訊彈性運轉。
ID分享模式、群組傳送功能
由於能對複數輪軸同時傳送指令,可防止始動時的蛇行或進行緊急旋轉動作。
調整時有用的功能
透過網路進行各種設定
- BLV系列 R型
-
 ,
,
- BLH系列
-
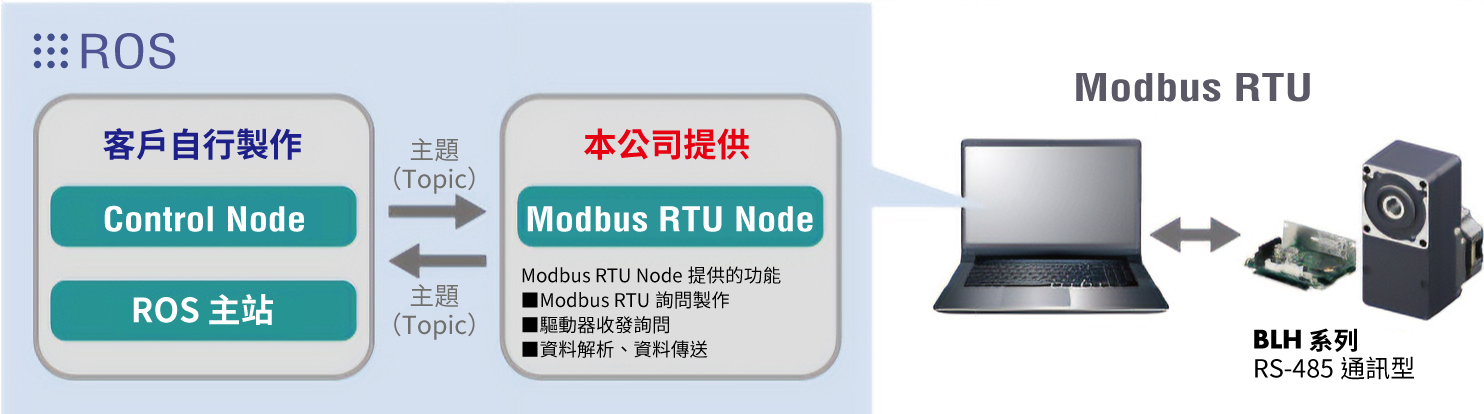
BLV系列R型和BLH系列可以使用「ROS」創建的軟體進行控制。
本公司的網頁準備了以ROS動作時的ROS節點、手冊、範例程式碼。
- 當BLV系列R型使用「ROS」創建的軟體進行控制時,無法使用ID共用模式。
依據負載增益調整
依據負載可調整增益(響應性)。有助於安定行走。
狀態監視
透過資料設定軟體的監視功能,可掌握狀態。BLV系列R型搭載追蹤監視功能,最多可連續量測1天。當發生問題時,有助於追究原因。
- *CiA®、CANopen®是CAN in Automation e.V. 的註冊商標。
- *Modbus(RTU)為Schneider Automation Inc.的註冊商標。
對應產品
-
- ● BLV系列 R型
-
BLH系列也有販售標準型馬達。
-

| 介紹的特徵 | 輸出 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 15 W | 30 W | 50 W | 60 W | 100 W | 200 W | 400 W | |||
| 低底盤、薄型設計 高耐載重性能 |
出力軸 | 中空軸扁平式減速機 | ● ● | ● ● | ● | ● ● | ● | ● | |
| 法蘭輸出頭 | ● ● | ||||||||
| 小型、薄型驅動器 | ● ● | ● ● | ● ● | ● | ● ● | ● | ● | ||
| 電磁剎車 | ● ● | ● ● | ● ● | ● | ● | ||||
| 電子剎車 | 負載維持 | ● | ● | ● | |||||
| S-ON | ● | ● | ● | ● | |||||
| 停止位置的設定、微調整 | 位置控制 | ● | ● | ● | ● | ||||
| 速度控制 | 1~4000 r/min | ● | ● | ● | ● | ||||
| 80~3000 r/min | ● | ● | ● | ||||||
| 100~3000 r/min | ● | ● | ● | ● | |||||
| 筆直行走 迴避 停止 |
高解析度檢知器 | ● | ● | ● | ● | ||||
| 直接資料運轉 | ● | ● | ● | ● | |||||
| 傳送資料 | ID分享模式 | ● | ● | ● | ● | ||||
| 群組傳送 | ●※ | ●※ | ●※ | ● | ● | ● | ● | ||
| 對應網路 | Modbus (RTU) | ●※ | ●※ | ●※ | ● | ● | ● | ● | |
| CANopen | ● | ● | ● | ● | |||||
| 增益調整 | ● | ● | ● | ● | |||||
| 資料設定軟體 | ● | ● | ● | ● | ● | ● | ● | ||
- ※限RS-485通訊型
針對提升生產力與減少物料搬運設備,包含自動分揀系統、無人搬運車及疊棧系統)之人手需求等課題,我們彙整了相關產品導入與提案的實績案例。