αSTEP 搭載無需電池絕對式編碼器 AZ系列
AZ98MAD-HP5-1

馬達/回路
該產品已不再銷售
| 產品類別 | 品名 | 單價未稅 | 出貨日 |
|---|---|---|---|
| 減速機馬達/回路 | AZ98MAD-HP5-1 | - | 停止生產的產品(2020.3.31 停止生產) |
附件
- 馬達, 回路, 電纜線 (1 m), 編碼器用電纜線 (1 m), 電磁剎車用電纜線 (1 m), 平行鍵, 主電源・回生電阻用連接器 (CN4), 輸出入信號用連接器 (CN5), DC24 V電源輸入・電磁剎車連接・回生電阻過熱輸入・動力切斷信號輸出入用連接器 (CN1), 連接器接線把手, 使用說明書
規格
特性

特性圖

負載轉矩-驅動器輸入電流特性
外形圖

馬達
回路
資料下載
其他規格
驅動器規格
| 驅動器品名 | AZD-AD, AZD-CD | AZD-AM3, AZD-CM3 AZD-AS3, AZD-CS3 |
AZD-AEP, AZD-CEP AZD-AED, AZD-CED AZD-APN, AZD-CPN AZD-AX, AZD-CX AZD-A, AZD-C |
|
|---|---|---|---|---|
| 介面 |
脈波輸入 | - | - |
|
| 控制輸入 | 10點 光耦合器 |
4點 光耦合器 |
6點 光耦合器 |
|
| 脈波輸出 | 2點 Line Driver |
- | 2點 Line Driver |
|
| 控制輸出 | 6點 光耦合器・開集極輸出 |
3點 光耦合器・開集極輸出 |
6點 光耦合器・開集極輸出 |
|
| 電源關閉信號輸入 | 2點 光耦合器 |
|||
| 電源關閉監視輸出 | 1點 光耦合器・開集極輸出 |
|||
驅動器功能
| 內藏定位功能型 | RS-485通訊附脈波列輸入型 | 脈波列輸入 系列 |
EtherNet/IP對應 PROFINET對應 |
||||
|---|---|---|---|---|---|---|---|
| 定位資料組數 | 256點 | 256點*1 | 256點 | ||||
| 遙控I/O | 輸入 | 16 點 | - | 16 點 | |||
| 輸出 | 16 點 | - | 16 點 | ||||
| 設定工具 | 支援軟體MEXE02 | ||||||
| 座標管理方法 | 免電池絕對式系統 | ||||||
| 運轉 | 定位運轉 | 種類 | 定位運轉 | ○ | ○ | ○*1 | ○ |
| 定位 推壓運轉*2 |
○ | ○ | ○*1 | ○ | |||
| 連結方式 | 單獨運轉 | ○ | ○ | ○*1 | ○ | ||
| 順序運轉 | ○ | ○ | ○*1 | ○ | |||
| 多段變速 (形狀連接) |
○ | ○ | ○*1 | ○ | |||
| 程序控制 | Loop運轉 (反覆) |
○ | ○ | ○*1 | ○ | ||
| Event跳轉運轉 | ○ | ○ | ○*1 | ○ | |||
| 速度控制運轉(連續運轉) | ○ | ○ | ○*1 | ○ | |||
| 原點復歸運轉 | 原點復歸運轉 | ○ | ○ | ○ | ○ | ||
| 高速原點復歸運轉 | ○ | ○ | ○ | ○ | |||
| JOG運轉 | ○ | ○ | ○ | ○ | |||
| 監視/其他資訊 | 波形監視 | ○ | ○ | ○ | ○ | ||
| 過負載檢知 | ○ | ○ | ○ | ○ | |||
| 過熱檢知 (馬達、驅動器) |
○ | ○ | ○ | ○ | |||
| 位置・速度資訊 | ○ | ○ | ○ | ○ | |||
| 溫度檢知 (馬達、驅動器) |
○ | ○ | ○ | ○ | |||
| 馬達負載率 | ○ | ○ | ○ | ○ | |||
| 行走距離、累積行走距離 | ○ | ○ | ○ | ○ | |||
| Alarm | ○ | ○ | ○ | ○ | |||
- *1
- 在透過設定支援軟體MEXE02設定後即可使用。
- *2
- 推壓運轉無法用於減速機型馬達及電動模組產品DGII系列。
RS-485通訊規格
| 協定 | Modbus RTU 模式 |
|---|---|
| 電氣特性 | 符合EIA-485、直式電纜線 使用雙絞線(建議採用TIA/EIA-568B CAT5e以上),總延長距離為50m以下。* |
| 通訊方式 | 半雙工通訊、起停同步方式(資料:8位元,停止位元:1位元/2位元,奇偶:無/偶數/奇數) |
| 傳送速度 | 支援9600bps/19200bps/38400bps/57600bps/115200bps/230400bps。 |
| 連接類型 | 1台可程式控制器(主站)最多能夠連接31台。 |
- *因配線、配置不同,馬達電纜線和電源電纜線所產生的雜訊造成問題時,請屏蔽電纜線或使用鐵氧體磁芯。
一般規格
| 馬達 | 驅動器 | |||
|---|---|---|---|---|
|
內藏定位功能型 RS-485通訊附脈波列輸入型 EtherNet/IP對應 EtherCAT對應 PROFINET對應 |
脈波列輸入型 MECHATROLINK-Ⅲ對應 SSCNETⅢ/H對應 |
|||
| 耐熱等級 | 130(B) [UL/CSA 取得 105 (A) 認證] |
− | ||
| 絕緣電阻 |
在以下位置之間施加DC500 V時,絕緣電組測試儀顯示為100 MΩ或以上:
|
當在以下位置之間以DC500 V高阻錶測量,測量值為100 MΩ以上:
|
||
| 絕緣耐壓 |
如下所示,施加電壓1分鐘亦無異常。
|
足以承受以下1分鐘:
|
||
| 使用環境 (運行時) |
環境溫度 | 0~+40 °C (無凍結)*2 | 0~+55 °C(無凍結)*3 | |
| 環境溼度 | 最大85%(無結露) | |||
| 環境 | 電纜線型:無腐蝕性氣體或灰塵。不得接觸水、油或其他液體。 連接用電纜線連接時:無腐蝕性氣體或灰塵。不得接觸油或其他液體。 |
無腐蝕性氣體或灰塵。不得接觸水、油或其他液體。 | ||
| 保護等級 | 電纜線型:IP66 (安裝面及連接器零件除外) 連接器型: 連接用電纜線連接時 IP66 (不包括安裝面、連接用電纜線和驅動器連接器) |
IP10 | IP20 | |
| 靜止角度誤差 |
AZM46、AZM48:±4 弧分 (±0.067°) |
|||
| 出力軸振幅 | 0.05 T.I.R.(mm)*4 | − | ||
| 安裝內緣與軸的同心度 | 0.075 T.I.R.(mm)*4 | − | ||
| 對安裝面出力軸的垂直度 | 0.075 T.I.R.(mm)*4 | − | ||
| 斷電時多圈數檢測範圍 | ±900轉(1800轉) | |||
- *1
- 僅適用於有電磁剎車的型號
- *2
- 根據東方馬達實測情況
- *3
- 當散熱板至少相當於尺寸為200×200 mm、厚度為2 mm的鋁板時
- *4
- T.I.R.(Total Indicator Reading):以標準軸心為中心點,將測量部位運轉一圈時,以分厘表測得之總量。
注意事項
-
進行絕緣電阻測量、絕緣耐壓測試時,請分開馬達和驅動器。
另外,請勿對馬達的ABZO檢知器執行這些測試。
容許懸吊載重、容許推力載重
| 系列 | 馬達 安裝尺寸 尺寸 |
馬達 品名 |
減速比 | 容許懸吊載重 | 容許 軸向載重 |
||||
|---|---|---|---|---|---|---|---|---|---|
| 與出力軸端的距離[mm] | |||||||||
| 0 | 5 | 10 | 15 | 20 | |||||
| 標準型 | 20 mm | AZM14 AZM15 AZME14 |
- | 12 | 15 | - | - | - | 3 |
| 28 mm | AZM24 AZM26 AZME24 AZME26 |
25 | 34 | 52 | - | - | 5 | ||
| 42 mm | AZM46 | 35 | 44 | 58 | 85 | - | 15 | ||
| AZM48 | 30 | 35 | 44 | 58 | 85 | ||||
| 60 mm | AZM66 AZM69 |
90 | 100 | 130 | 180 | 270 | 30 | ||
| 85 mm | AZM98 AZM911 |
260 | 290 | 340 | 390 | 480 | 60 | ||
| TS減速機型 | 42 mm | AZM46 | 3.6、7.2、10 | 20 | 30 | 40 | 50 | - | 15 |
| 20、30 | 40 | 50 | 60 | 70 | - | ||||
| 60 mm | AZM66 | 3.6、7.2、10 | 120 | 135 | 150 | 165 | 180 | 40 | |
| 20、30 | 170 | 185 | 200 | 215 | 230 | ||||
| 90 mm | AZM98 | 3.6、7.2、10 | 300 | 325 | 350 | 375 | 400 | 150 | |
| 20、30 | 400 | 450 | 500 | 550 | 600 | ||||
| PS減速機型 | 28 mm | AZM24 | 7.2、10 | 45 | 60 | 80 | 100 | - | 40 |
| 42 mm | AZM46 | 5 | 70 | 80 | 95 | 120 | - | 100 | |
| 7.2 | 80 | 90 | 110 | 140 | - | ||||
| 10 | 85 | 100 | 120 | 150 | - | ||||
| 25 | 120 | 140 | 170 | 210 | - | ||||
| 36 | 130 | 160 | 190 | 240 | - | ||||
| 50 | 150 | 170 | 210 | 260 | - | ||||
| 60 mm | AZM66 | 5 | 170 | 200 | 230 | 270 | 320 | 200 | |
| 7.2 | 200 | 220 | 260 | 310 | 370 | ||||
| 10 | 220 | 250 | 290 | 350 | 410 | ||||
| 25 | 300 | 340 | 400 | 470 | 560 | ||||
| 36 | 340 | 380 | 450 | 530 | 630 | ||||
| 50 | 380 | 430 | 500 | 600 | 700 | ||||
| 90 mm | AZM98 | 5 | 380 | 420 | 470 | 540 | 630 | 600 | |
| 7.2 | 430 | 470 | 530 | 610 | 710 | ||||
| 10 | 480 | 530 | 590 | 680 | 790 | ||||
| 25 | 650 | 720 | 810 | 920 | 1070 | ||||
| 36 | 730 | 810 | 910 | 1040 | 1210 | ||||
| 50 | 820 | 910 | 1020 | 1160 | 1350 | ||||
| PN減速機型 | 28mm | AZM24 | 10 | 45 | 60 | 80 | 100 | - | 40 |
| 42mm | AZM46 | 5 | 80 | 95 | 120 | 160 | - | 100 | |
| 7.2 | 90 | 110 | 130 | 180 | - | ||||
| 10 | 100 | 120 | 150 | 200 | - | ||||
| 60mm | AZM66 | 5 | 240 | 260 | 280 | 300 | 330 | 200 | |
| 7.2 | 270 | 290 | 310 | 340 | 370 | ||||
| 10 | 300 | 320 | 350 | 380 | 410 | ||||
| 90mm | AZM98 | 5 | 370 | 390 | 410 | 430 | 460 | 600 | |
| 7.2 | 410 | 440 | 460 | 490 | 520 | ||||
| 10 | 460 | 490 | 520 | 550 | 580 | ||||
| HPG減速機型 | 40 mm | AZM46 | 5 | 150 | 170 | 190 | 230 | 270 | 430 |
| 9 | 180 | 200 | 230 | 270 | 320 | 510 | |||
| 60 mm | AZM66 | 5 | 250 | 270 | 300 | 330 | 360 | 700 | |
| 15 | 360 | 380 | 420 | 460 | 510 | 980 | |||
| 90 mm | AZM98 | 5 | 600 | 630 | 670 | 710 | 750 | 1460 | |
| 15 | 830 | 880 | 930 | 980 | 1050 | 2030 | |||
| 諧波 減速機型 |
30 mm | AZM24 | 50、100 | 100 | 135 | 175 | 250 | - | 140 |
| 42 mm | AZM46 | 180 | 220 | 270 | 360 | 510 | 220 | ||
| 60 mm | AZM66 | 320 | 370 | 440 | 550 | 720 | 450 | ||
| 90 mm | AZM98 | 1090 | 1150 | 1230 | 1310 | 1410 | 1300 | ||
| FC減速機型 | 35 mm | AZM24 | 7.2、15、25 | 80 | 120 | 180 | 230 | - | 80 |
| 42 mm | AZM46 | 7.2、10、20、30 | 180 | 200 | 220 | 250 | - | 100 | |
| 60 mm | AZM66 | 270 | 290 | 310 | 330 | 350 | 200 | ||
- 品名為可用於識別產品名稱的字元。
- PS、PN、HPG減速機型: 懸吊載重或推力載重其中之一作用時,壽命滿20,000小時的數值設為容許值。
懸吊載重和軸向載重
容許慣量載重
若對輸出凸緣安裝面施加偏心負載,會對軸承發生負載慣量作用。
使用時,請依以下公式確認軸向載重與負載慣量在規格值內。
HPG減速機型凸緣輸出型
| 品名 | 減速比 | 容許推力載重[N] | 容許慣量載重(N·m) | 常數a (m) |
|---|---|---|---|---|
| AZM46 | 5 | 430 | 4.9 | 0.006 |
| 9 | 510 | 5.9 | ||
| AZM66 | 5 | 700 | 12.0 | 0.011 |
| 15 | 980 | 17.2 | ||
| AZM98 | 5 | 1460 | 38.7 | 0.0115 |
| 15 | 2030 | 53.5 |
負載慣量可利用以下公式計算。
-
例1:
由輸出凸緣的中心往水平方向,外力F(N)施加於L(m)突出位置時
-
例2:當外力F(N)施加到突出位置時
L (m)垂直於輸出凸緣安裝面
諧和式減速機型
| 馬達安裝尺寸 | 容許推力載重[N] | 容許慣量載重(N·m) | 常數a (m) |
|---|---|---|---|
| 42 mm | 220 | 5.6 | 0.009 |
| 60 mm | 450 | 11.6 | 0.0114 |
負載慣量可利用以下公式計算。
-
例1:當外力F(N)施加到突出位置時
距輸出凸緣中心水平距離L(m)
-
例2: 當外力F(N)施加到垂直方向延伸的位置時
距輸出凸緣安裝面的 L (m)。
品名為可用於識別產品名稱的字元。
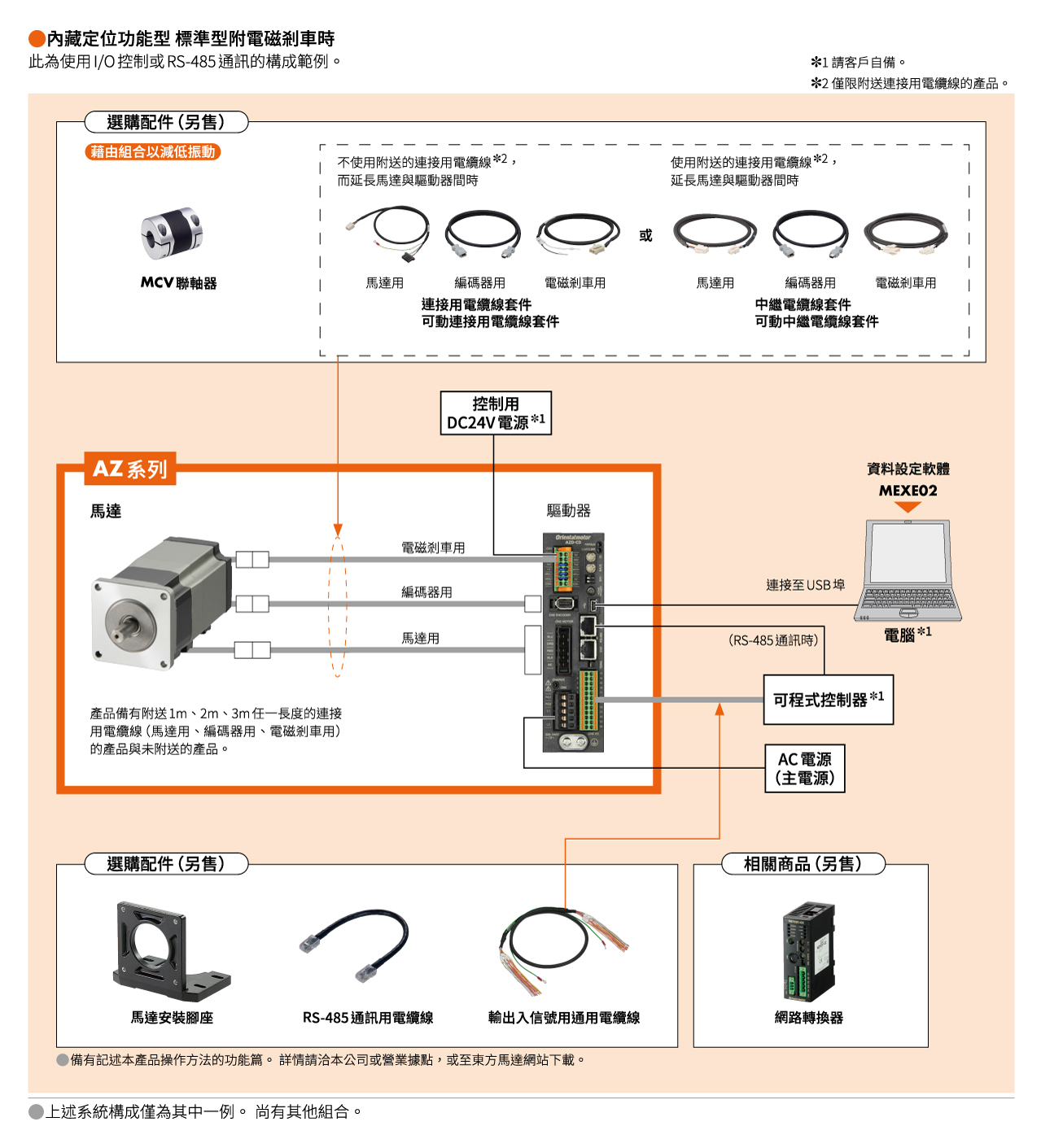
系統構成
相關產品
| 產品 | 特徵 | ||
|---|---|---|---|
NETC02-CC
|
特徵 |
[CC-Link Ver. 2對應] 透過支援CC-Link Ver.2,可以簡化梯形圖程式並縮短資料發送和接收的通訊時間。 |
|
| 產品 |
NETC01-ECT
|
特徵 |
[EtherCAT對應] |
電纜線、周邊機器
您可以透過點選品名欄將其新增至「網路商店報價、訂購」。
close