AC馬達 感應馬達的構造與動作原理
感應馬達的結構
下圖顯示了感應馬達的結構。
- ①
- 端箍
是透過切割/精加工壓鑄鋁合金塊而製成。壓入馬達外殼內。
- ②
- 滾珠軸承
- ③
- 轉子
由疊層磁鋼片和壓鑄鋁合金導體組成。
- ④
- 彈簧
- ⑤
- 定子
由堆疊的電磁鋼板製成的定子鐵芯、聚酯護套銅線繞組及絕緣薄膜組成。
- ⑥
- 馬達外殼
由鋁合金壓鑄塊切割/精加工而成。
感應馬達的構造與動作原理
感應馬達(感應馬達)是透過電磁感應效應產生旋轉力的馬達。
此外,我們經營的AC馬達中,可逆馬達、力轉矩馬達、附電磁剎車馬達、防塵・防水馬達、離合器・剎車馬達等類型(分類),在特性和附加功能上有所不同。然而,其工作原理本身與感應馬達相同。
使用Arago圓盤的說明
用Arago圓盤解釋感應馬達的工作原理。
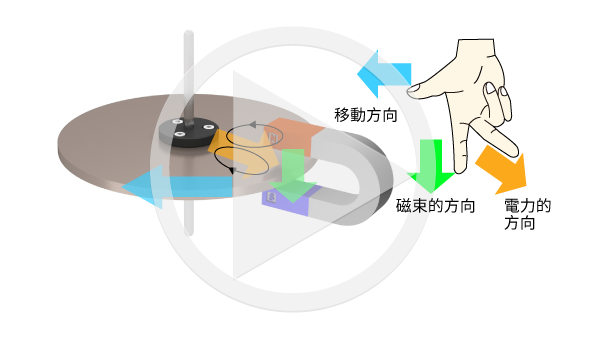
用感應馬達取代Arago圓盤
當以感應馬達的實際部件取代Arago圓盤時,磁鐵對應於定子產生的旋轉磁場,而銅板(導體)對應於轉子。
轉子採用鋁和鐵設計為籠子轉子,可有效提取旋轉動力。
關於旋轉磁場
以2極馬達的定子為例,對定子中產生的旋轉磁場進行說明。
感應馬達有2個繞組,一個主繞組和一個輔助繞組。
在實際使用單相電源的感應馬達中,連接如下。
來自電源的電流直接流向主繞組,電流經由進相電容器流向輔助繞組。
此時,輔助繞組中流過的電流將成為與主繞組中流過的電流反相90°電角的波形。
從①到④的每次,定子中都會產生如上圖所示的磁極,遵循右手螺旋定則。如果我們觀察從①到②到③到④的時間推移,①中位於3點鐘位置的N極從3點鐘位置開始像順時針方向旋轉一樣變化依次為6點、9點、12點。
這是定子中產生的旋轉磁場。
現在考慮連接到進相電容器的輔助繞組中沒有電流的情況。此時,上圖的②、④狀態不會發生,而是從①變成③。N極的位置從3點鐘變成了9點鐘,改變了180°,雖然看起來磁極旋轉了,但不清楚它的旋轉方向是順時針還是逆時針。
當以這種方式使用單相電源運作時,透過使用進相電容器產生異相電流,從而產生固定方向的旋轉磁場。
當馬達在三相電源上運作時,則不需要進相電容器。
這是因為三相電源具有預先定義的異相波形。