選用電動滑台/電動缸:電動模組產品初步選用
選用方法
(1) 確認所需規格
確認設備所需的規格。
- 搬運重量
- m = 15 [kg]
- 定位距離
- L = 500 [mm]
- 定位時間
- T = 2 秒內
- 驅動方向
- 垂直
(2) 電動模組產品選用
依所需規格暫定選用以下電動模組產品機構。
- 品名
- EASM6
- 導程
- 6 mm
- 電源輸入
- 單相220V
(3) 確認定位時間
檢查模組產品是否能在規定的時間內完成必要的定位。這可以透過從圖表中獲得粗略的定位時間或透過計算獲得相當準確的定位時間來完成。下面解釋每個確認過程。
實際運行時間有微小誤差,因此計算僅供參考。
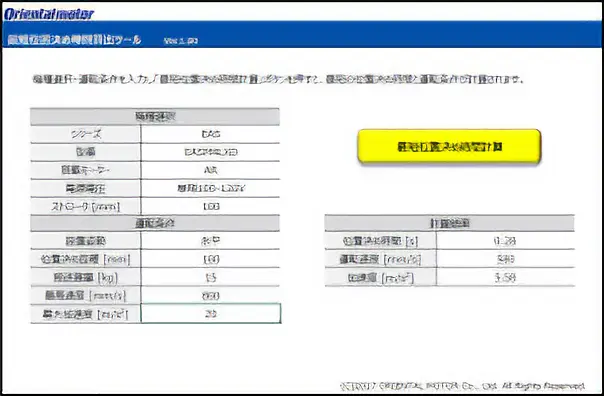
使用最短定位時間計算工具
對於東方馬達電動滑台和電動缸的適用產品,可以透過「型號」和「運行條件」計算出大致的定位時間。
從圖中獲取
- ①
-
使用圖表確認定位距離 500mm 所需的定位時間。
定位時間:1.77 s
滿足2秒或更短的定位時間要求,因此可以使用。
- ②
-
如果滿足定位時間要求,則檢查運轉速度和加速度。
運轉速度:320 mm/s
加速度 : 1.5 m/s2(0.15 G)
- ③
- 如果無法滿足定位時間要求,請選用其他型號。
使用公式計算
- ①
-
確認運轉條件
檢查以下條件:
定位距離、起動速度、加速度、運轉速度
- ②
-
根據上述運轉條件,確認驅動方式是三角驅動還是梯形驅動
由定位距離、起動速度、加速度和運轉速度計算出三角驅動的最高速度。如果計算出的最高速度等於或低於運轉速度,則該運行被視為三角驅動。如果計算出的最高速度超過運轉速度,則該運行被視為梯形驅動。
\(\begin{align}
V_{Rmax} &= \sqrt{ \frac{2 \cdot a_1 \cdot a_2 \cdot L}{a_1 + a_2} \cdot 10^3 + V_{S^2}} \\[5pt]
V_{Rmax} & \leqq V_R \rightarrow \text{三角驅動} \\[5pt]
V_{Rmax} & \gt V_R \rightarrow \text{梯形驅動}\end{align}\)
- ③
-
計算定位時間
[梯形驅動的情況]
\(\begin{align}T &= T_1 + T_2 + T_3 \\[5pt]
& = \frac{V_R - V_S}{a_1 \times 10^3} + \frac{V_R - V_S}{a_2 \times 10^3} + \frac{L}{V_R} - \frac{\left(a_1 + a_2 \right) \times \left(V_{R^2} - V_{S^2} \right)}{2 \times a_1 \times a_2 \times V_R \times 10^3} \end{align}\)
[三角驅動的情況]
\(\begin{align}T &= T_1 + T_2 \\[5pt]
& = \frac{V_{Rmax} - V_S}{a_1 \times 10^3} + \frac{V_{Rmax} - V_S}{a_2 \times 10^3} \end{align}\)
-
- VRmax
- 計算得出三角驅動的最高速度 [mm/s]
- VR
- 運轉速度[mm/s]
- Vs
- 起動速度[mm/s]
- L
- 定位距離 [mm]
- a1
- 加速度[m/s²]
- a2
- 減速停止[m/s²]
- T
- 定位時間[s]
- T1
- 加速時間 [s]
- T2
- 減速時間 [s]
- T3
- 定速時間[s]
實際運行時間有微小誤差,因此計算僅供參考。
其他轉換公式解釋如下。
脈波速度和運轉速度可以使用以下公式進行換算。保持運轉速度低於規定的最高速度。
\(\begin{align}\text{脈波速度[Hz]} =\frac{\text{運轉速度 [mm/s]}}{ \text{最小移動量 [mm]}}\end{align}\)
動作脈波數和移動量可以使用下式進行換算。
\(\begin{align}\text{動作脈波數 [脈波]} =\frac{\text{移動量 [mm]}}{ \text{最小移動量 [mm]}}\end{align}\)
加減速斜率和加速度可以使用以下公式進行換算。
\(\begin{align}\text{加減速斜率 [ms/kHz]} =\frac{\text{最小移動量 [mm] × }10^3}{ \text{加速度 [}m/s^2\text{]}}\end{align}\)
速度、移動量、加速度的輸入方法依上位控制裝置而不同。請根據您的使用情況計算。