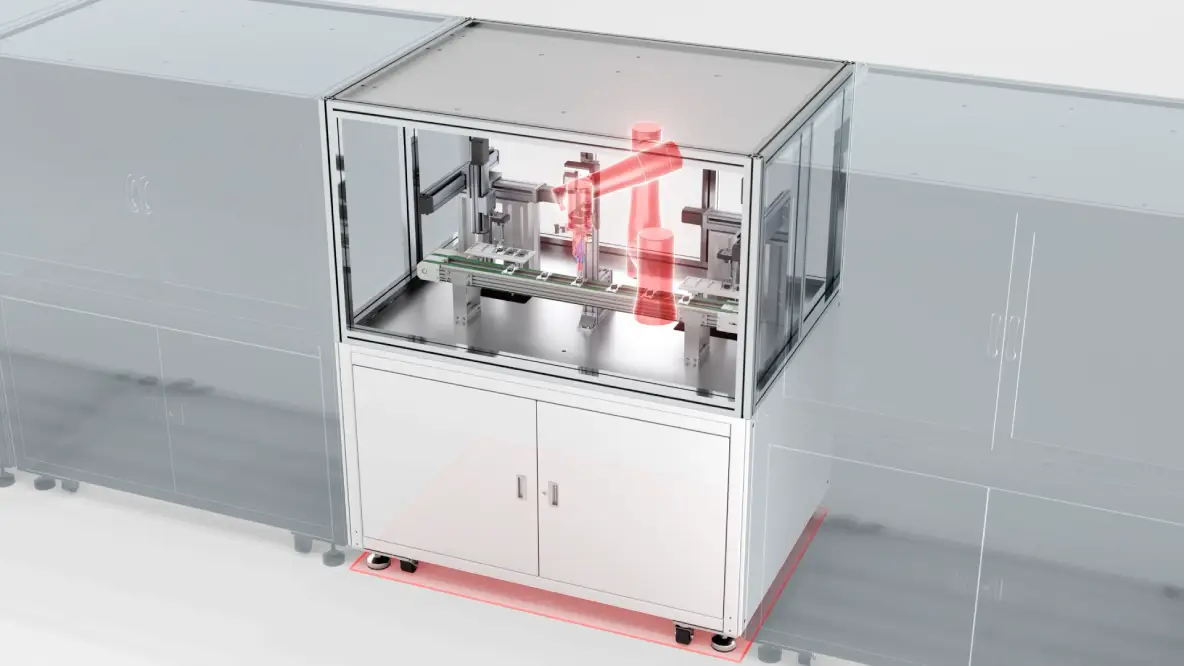
在狹窄空間也能實現精密塗佈的電動模組產品提案
| 產業 | 半導體、平面顯示器、電子零件 |
|---|---|
| 工程・設備名稱 | 小型機器組裝設備(精細塗佈點膠驅動) |
| 課題 | 節省空間、提高定位精度、減少零件數量 |
課題:提高塗佈製程的精度 並縮小點膠機驅動部的尺寸
以往的問題點
- 由於點膠設備是針對小型工件而設計的,一般的關節型機器人會佔用太多空間。希望能夠縮小點膠設備的尺寸。
- 想要增加點膠部的剛性,以提高點塗佈程的精度和穩定性。
- 希望能減少檢知器的配線工時並簡化配線。
解決方法:搭載絕對式編碼器的高剛性電動模組產品可實現精密點膠機構的小型化
隨著裝置和工件變得越來越小,通用的關節型機器人變得過大且難以使用。
DGII系列整合了高剛性中空旋轉平台、及搭載無需電池絕對式編碼器的馬達,無需設置原點等外部檢知器,有效節省空間。實現塗佈機驅動部的高精度化和小型化。中空孔可用於佈線或氣體、液體的配管。
減少設計工作量、機構小型化
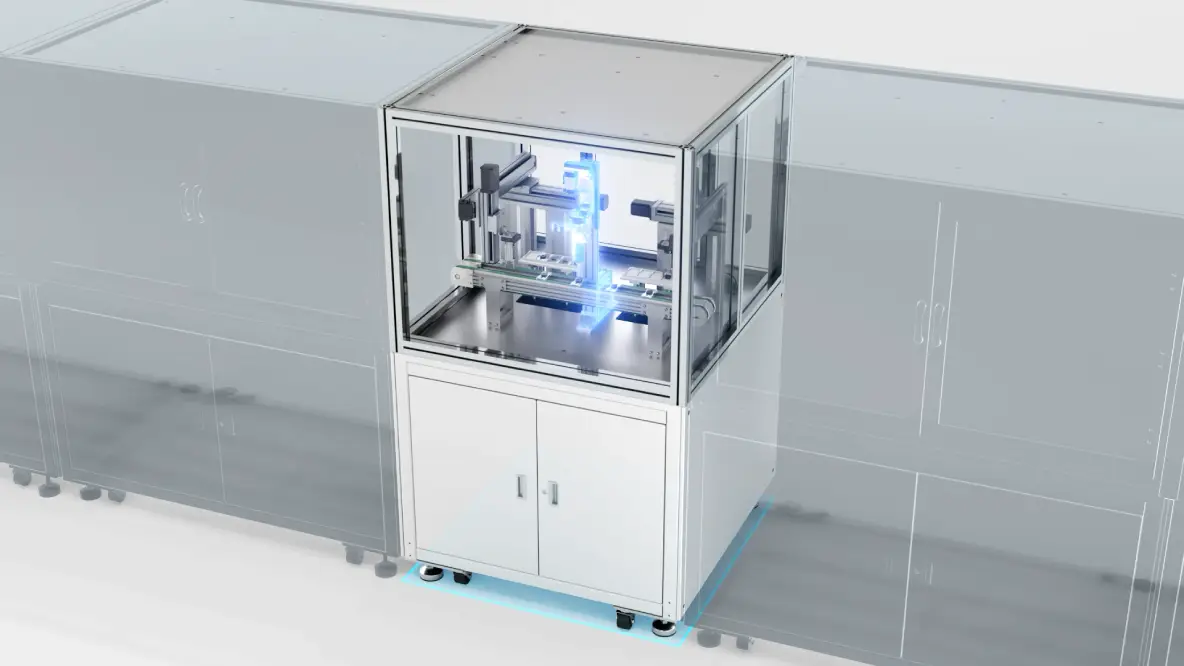
中空旋轉平台DGII系列的輸出平台可直接安裝在設備的工作台或手臂上,也可水平安裝、壁掛安裝,或天花板安裝。關於點膠機設備,將 X-Y 精密平台裝在天花板安裝的θ軸工作台上,即可在狹小的空間內驅動點膠機。此外,在Z軸方向上,透過與小型直線滑台組合,可以實現機構整體的小型化。
採用中空旋轉平台DGII 系列的機構小型化示意圖
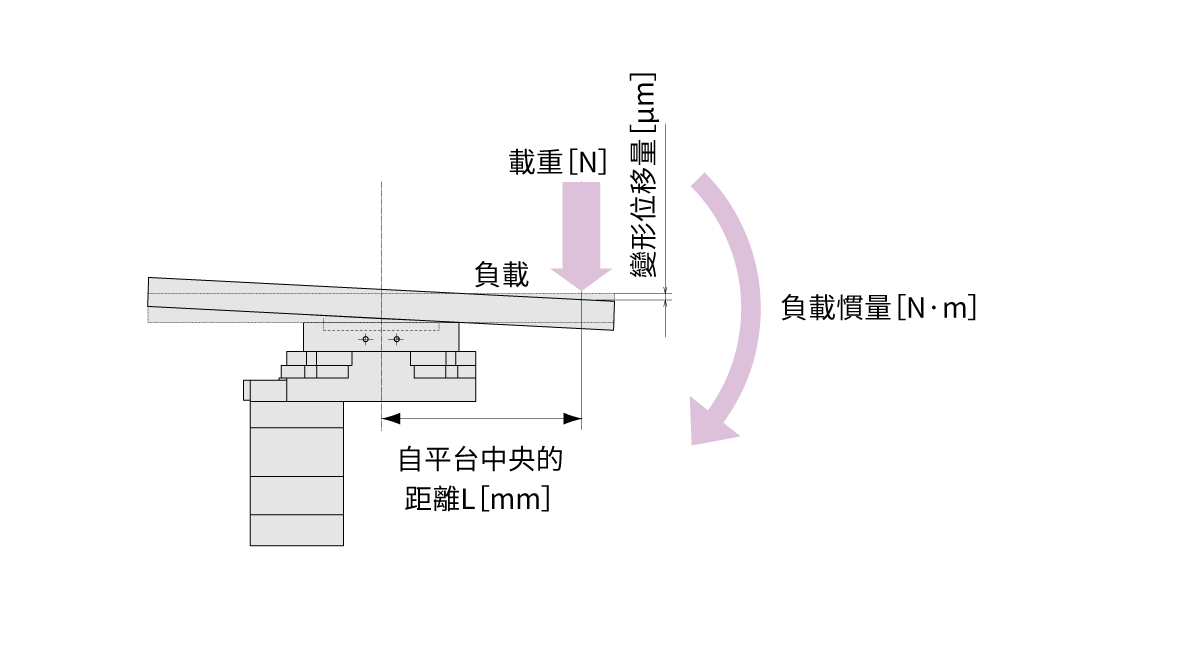
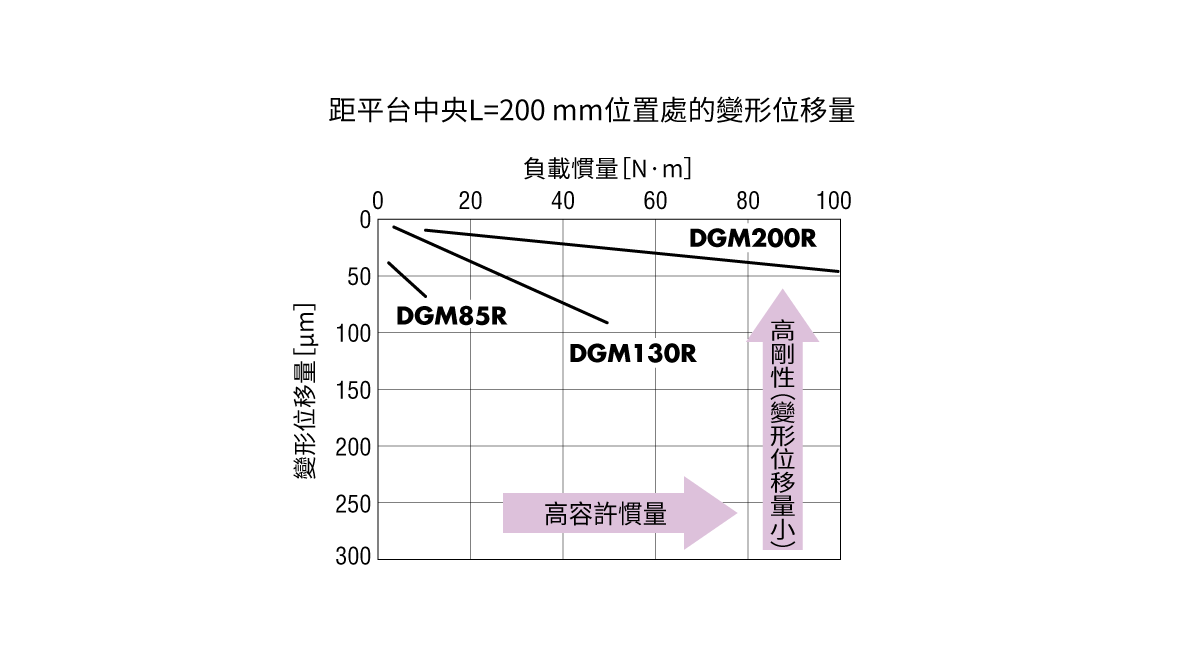
高剛性一體化結構的輸出平台、實現精密點膠
中空旋轉平台DGII系列將轉台機構與馬達結合,以實現高精度定位。無齒隙、反覆定位精度為±15arcsec(±0.004°)。如果需要更高的精度,請選擇安裝尺寸為85~200mm的產品,該產品採用交叉滾柱軸承且表面偏差較小。
搭載無需電池絕對式編碼器、網路對應及節省配線
中空旋轉平台DGII系列搭載αSTEP AZ系列的馬達。馬達內部搭載無需電池絕對式編碼器(ABZO檢知器),即使在斷電時也能保留位置資訊。不需要外部檢知器,例如原點檢知器或極限檢知器,從而節省了接線。如果選擇對應網路的驅動器,只需一條通訊電纜線即可連接上位控制器和驅動器,進一步減少佈線。
提案產品:中空旋轉平台DGⅡ系列
模組產品
安裝尺寸 □60 mm □85 mm □130 mm □200 mm
可搭配驅動器
AZ 系列驅動器(網路對應、內藏定位功能、RS-485通訊附脈波列輸入、脈波列輸入、網路對應多軸、mini)
●也備有搭載AZX系列伺服馬達的DGM200R(□200mm)。
如果您有任何問題,請聯絡我們,除了產品諮詢外,也可進行資料下載或Sample申請。