小型機器人OVR:用於提升疊棧系統生產力的3軸直角坐標型機器人
| 產業 | 物料搬運 |
|---|---|
| 製程設備名稱 | 疊棧系統 |
| 課題 | 提高生產力、節省勞力、降低成本 |
課題:人工疊棧過程的自動化
現有問題與需求
- 人工疊棧增加了作業人員的負擔並造成作業不均,成為提升生產力的阻礙。
- 通用工業機器人對於現場作業來說規格過高,而且引進成本高昂,阻礙了自動化的實現。
解決方法:提升生產力的小型機器人OVR與3軸直角坐標型機器人
疊棧是指將小型工業零件整齊地排列在棧板上的過程,它是零件製造工廠中提升生產力的關鍵要素。目前這項工作是人工完成的,但正在考慮使用工業機器人實現自動化。然而,典型工業機器人的體積和功能過於龐大,在引入時會對成本和空間造成挑戰。由於缺乏機器人導入的經驗,對於委託系統整合商所需支出的成本以及技術門檻也普遍感到擔憂。
為了解決這些問題,可以引入結構緊湊、易於操作的 OVR 3軸直角坐標型機器人,以高效地實現疊棧過程的自動化,提高生產效率。
免組裝設計,加速設備啟動速度
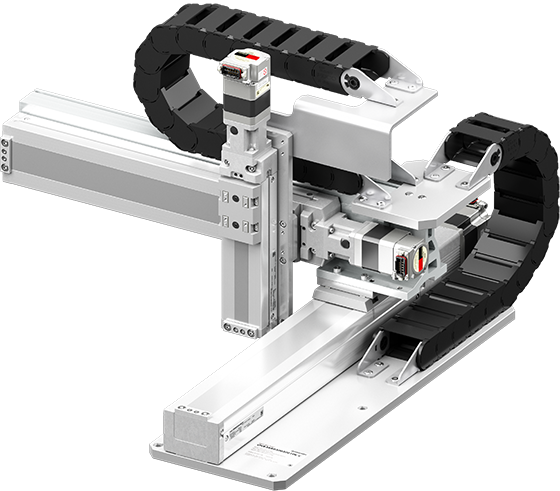
小型機器人 OVR(3軸直角坐標型機器人)的可動範圍為300 mm x 300 mm x 100 mm,可搬重量為 2.5 kg,使其成為小型負載自動轉移的理想尺寸。電動滑台的3個軸已組裝完畢,無需組裝人工,從而減少了啟動設備所需的時間。零件數量的精簡,也同步降低了製作BOM表、零件採購及驗收所需的工時與心力。
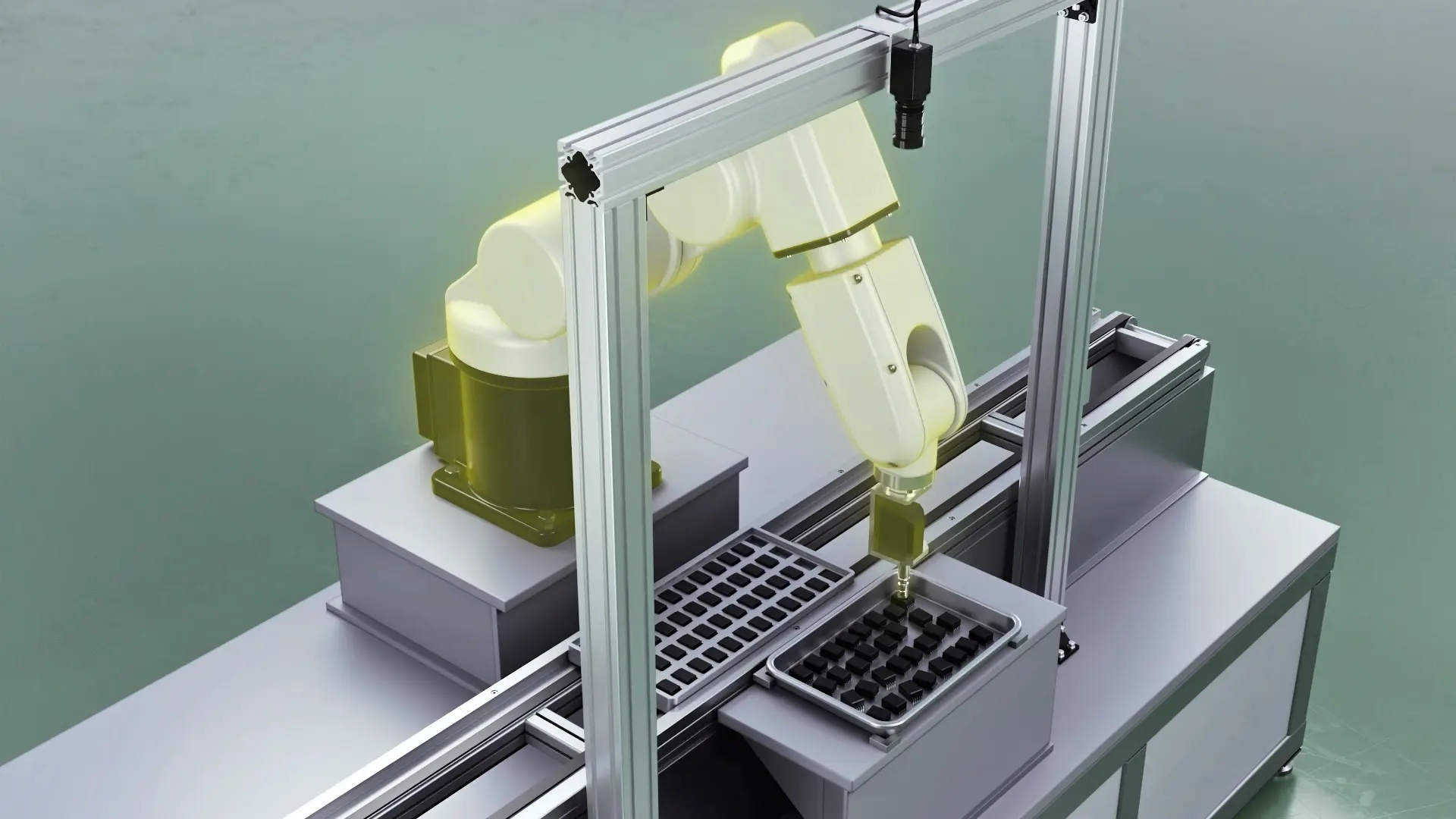
圖片展示了疊棧系統中機器人應用的引入
低成本自動化疊棧流程
小型機器人OVR(3軸直角坐標型機器人)比將一台典型的工業機器人外包給系統整合商進行引進的總成本要低,因為只需要考慮零件的成本。我們不僅提供機器人本身,還提供控制所需的設備和電纜線。
配置範例
| 品名 | 數量 | |
|---|---|---|
| 機器人 | OVR3AR030030Z10K-C | 1 |
| 機器人控制器 | MRC01-C | 1 |
| 驅動器 | AZD-KD | 3 |
| 馬達和驅動器之間的電纜線(3 m) | CCM030Z1CBF | 1 |
| CCM030Z1CVR | 1 | |
| CCM030Z1DFR | 1 | |
| RS-485通訊用電纜線(0.1 m) | CC001-RS4 | 3 |
- *除上述之外,還需要末端軸和DC電源輸入。
簡單控制的機器人控制器
MRC01-C 是一款機器人控制器,可控制小型機器人 OVR(3軸直角坐標型機器人),其設計直觀,即使是初學者也能輕鬆上手。設定是透過MRC Studio完成的,這是一款可以免費下載的程式設計軟體。透過程式設計軟體MRC Studio設定的運轉程式,僅需使用PC即可輕鬆進行教導與確認作業。
系統構成
使用機器人控制器MRC01-C和程式設計軟體MRC Studio,即可輕鬆實現機器人的控制。
推薦可連接至MRC01的驅動器為DC電源輸入型驅動器AZD-KD或mini驅動器AZD-KR2D。

搭配2D視覺檢知器,進一步使精密作業自動化
機器人控制器MRC01-C搭載方便的功能,可使用視覺檢知器取得工作物位置與角度資訊,並運用該資訊來運轉機器人。
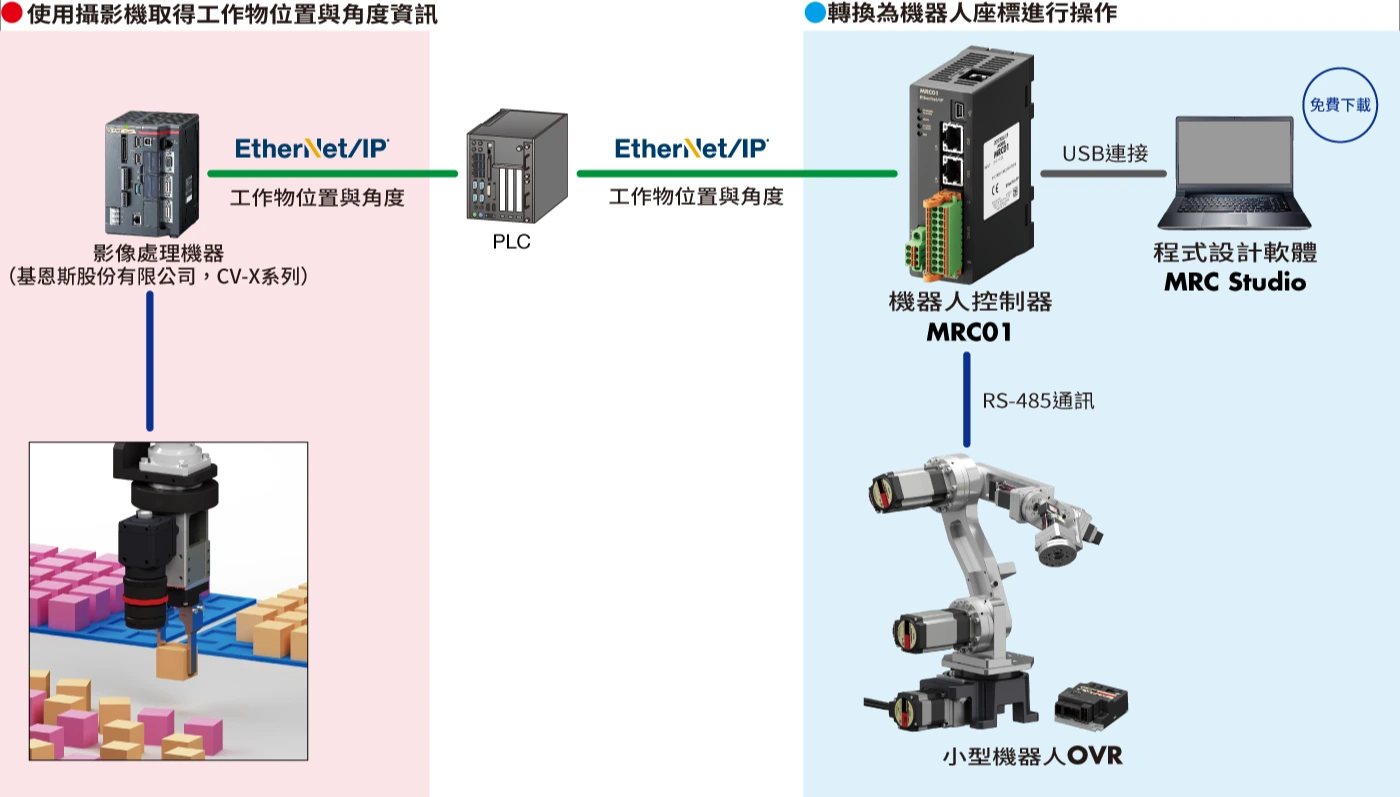
關於影像處理機器、PLC的對應機種
上述構成圖是台灣基恩斯股份有限公司製CV-X系列的連接例。我們也與其他製造商建立了聯繫,詳情請與我們聯繫。
校準
若要與2D相機連接,請使用MRC Studio進行預校準。只要看圖並依照畫面指示操作,即可輕鬆進行設定,減少補正工時。(最多可校正2台攝影機。)
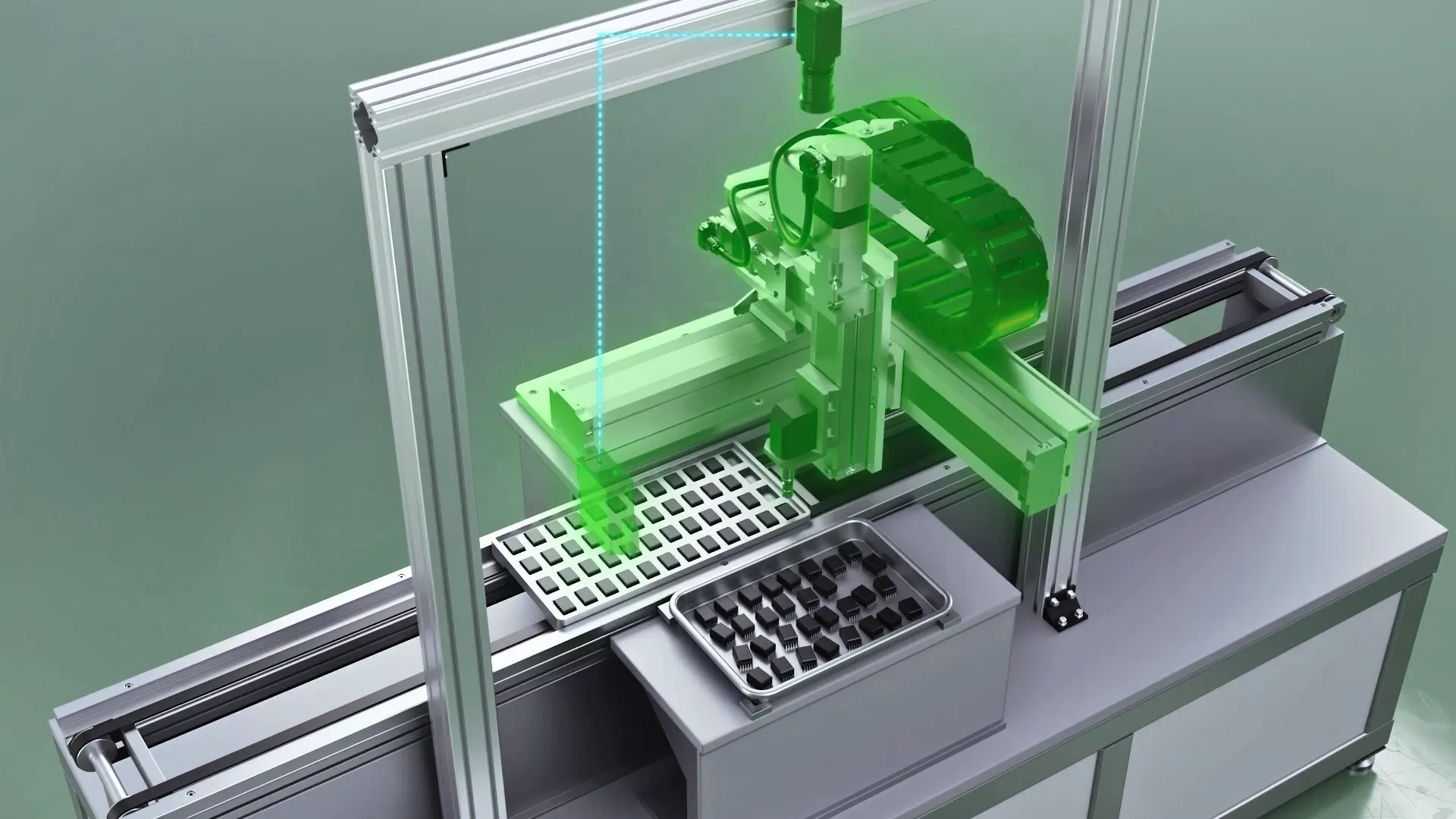
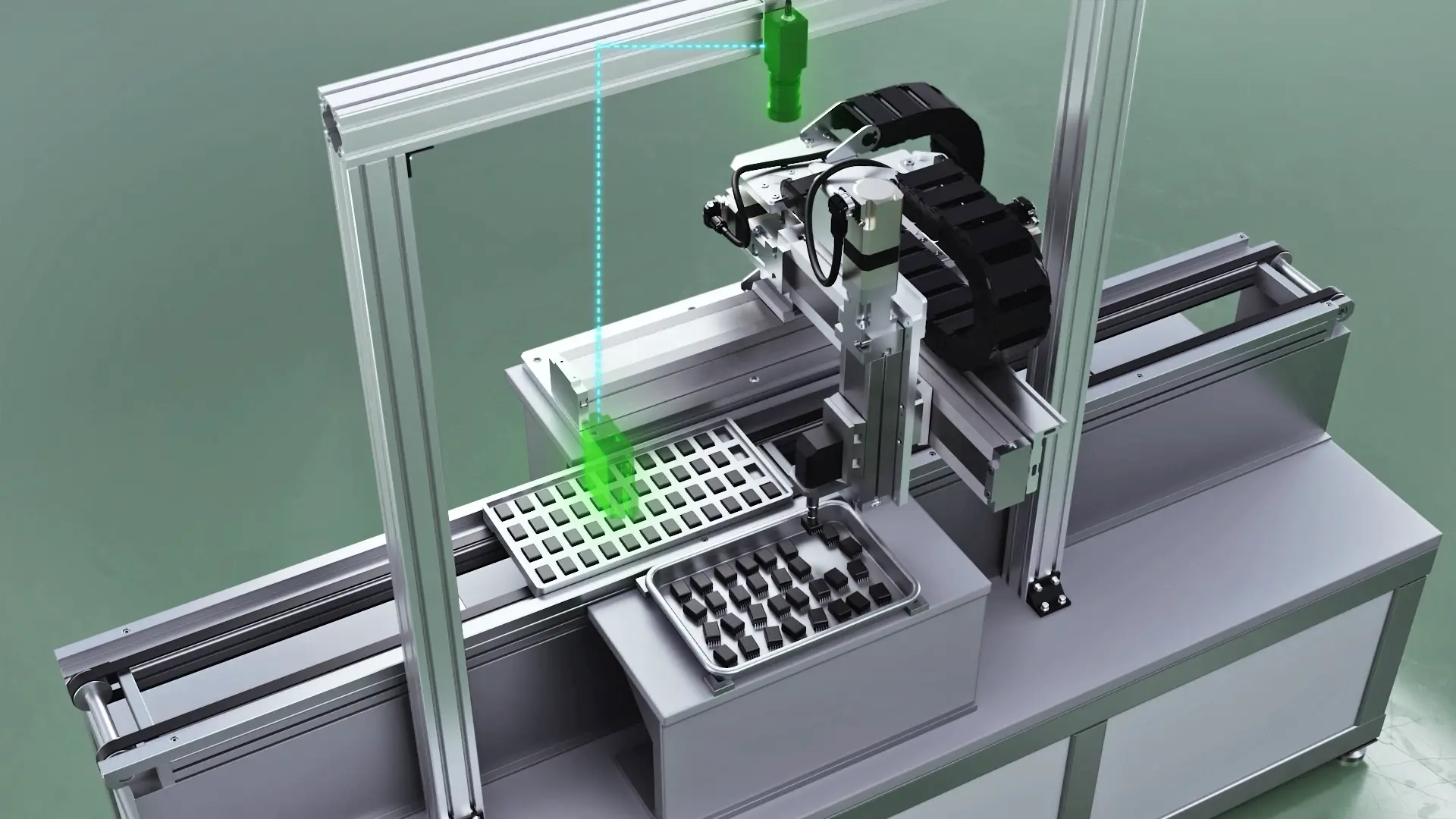
疊棧系統中視覺檢知器資訊導入機器人控制器 MRC01的影像
可靠的安裝支持
對於已經購買了小型機器人OVR和易於編程的機器人控制器 MRC01 但不確定初始配置的客戶,我們提供付費服務,與客戶合作創建其設備的機器人程序,並協助進行視覺檢知器設定。我們幫助客戶減少工作量和工時。
提案產品:小型機器人OVR 3軸直角坐標型機器人
機器人控制器
- MRC01
- 機器人控制單元 RCU系列驅動器
除了產品相關諮詢外,無論是問題討論、資料或樣品提供等任何事項,歡迎隨時與我們聯繫。
支援設備開發的步進馬達技術解說手冊發行中

為將馬達用於量產設備的使用者提供。關於轉矩特性、振動與發熱量等技術解說,以及產品陣容、客製化資訊、設備導入優勢等內容,皆彙整於此一冊中。設備研究、開發和設計不可或缺的資料。