如何縮短Mapping時間、提高產速
課題
如何縮短Mapping時間、提高產速
以往的裝置
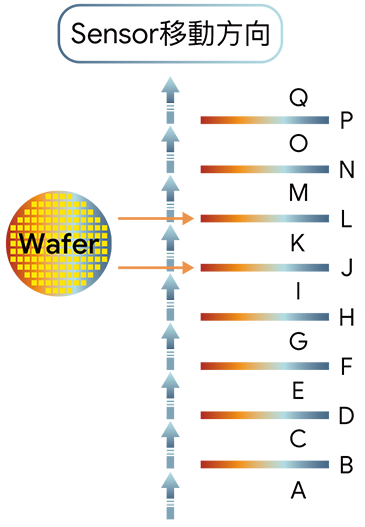
馬達驅動螺桿帶Sensor執行Mapping,遇到晶圓時速度須放慢,無晶圓時須快速通過,以達到產能提升的需求
使用MODBUS讀取到位信號,再發送下一動作指令
以往的問題
- 上位編寫程序不僅要多道指令,且增加通訊等待時間
- 指令為多段的短行程快速定位,使動作產生頓挫感

解決對策
AZ內藏定位型驅動器的活用提案

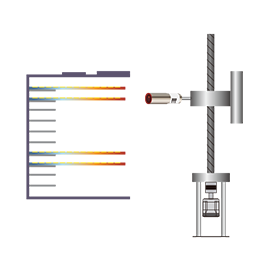
機構示意圖
提案
使用AZ系列自動連結功能,將相同間距的多筆絕對定位連結,即可實現快慢間隔的動作自動連結功能可減少多餘耗費時間,不需上位判斷是否到位才觸發下一筆設定為形狀連結,可以實現速度無縫連結,整體動作更順暢,不會有頓挫感

形狀連結設定範例
