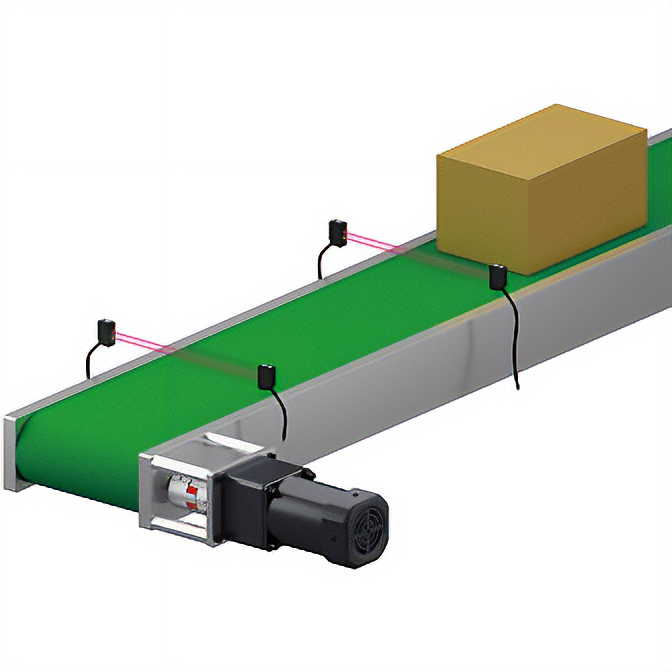
不使用定位檢知器的皮帶輸送機、高精度多點停止事例
課題
減少檢知器數量並進行多點停止
既有設備
三相感應馬達驅動輸送機,使用多個定位檢知器進行多點停止(採用變頻器進行速度控制)
- 適用
- 運輸負載
以往的問題點
- 大量檢知器和零件增加了接線和維護所需的工時
- 經常出現斷線、故障等問題
解決方法
步進馬達 RKⅡ系列
內藏定位功能型
高精度多點停止,無需定位檢知器

RKII系列步進馬達無需依賴定位檢知器即可實現高精度多點停止。
具體應用範例
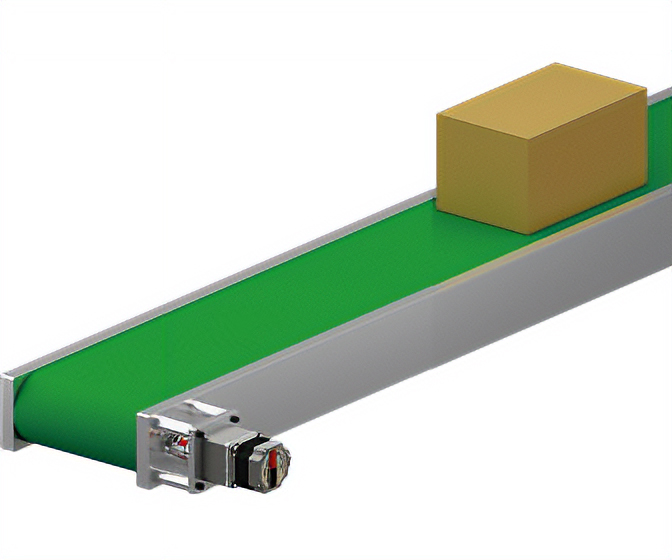
無檢知器高精度多點停止
內藏定位功能型,透過預先在驅動器中設定的開始位置到停止位置的移動量,可在任意位置停止。不需要定位檢知器,因此即使停止位置數量增加也可以靈活使用。
啟動/停止的響應性佳,且不會有過轉現象。即使重複定位,停止位置也不會變化,重現性高。
在通電狀態下馬達本身會產生保持力以維持停止位置。
使用專用軟體、輕鬆進行多點停止的設定和驅動
不同行進距離和速度的數據最多可連結 4 點,並透過一次START輸入進行驅動。
使用支援軟體MEXE02可以在電腦上輕鬆設定運轉資料。
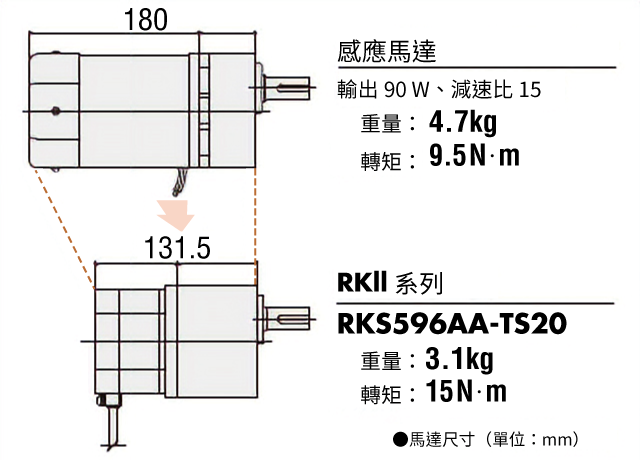
減小馬達尺寸和重量
與感應馬達相比,此馬達更加小型,有助於實現設備的小型化和輕量化。