Q.目前是將AZ系列EtherCAT對應驅動器與台灣歐姆龍PLC產品組合使用,並藉由驅動器的內部Profile進行控制。請問在原點復歸模式(HM)中有哪些原點復歸方法?
對象產品
AZ系列EtherCAT驅動規範對應驅動器:
AZD-AED, AZD-CED, AZD-KED, AZD2A-KED, AZD2B-KED, AZD3A-KED、AZD4A-KED, AZD-KRED
控制方法:使用驅動器的內部Profile(操作模式PP、PV、HM模式)
原點復歸模式(HM)為在Profile位置模式(PP)中用於原點復歸的模式。
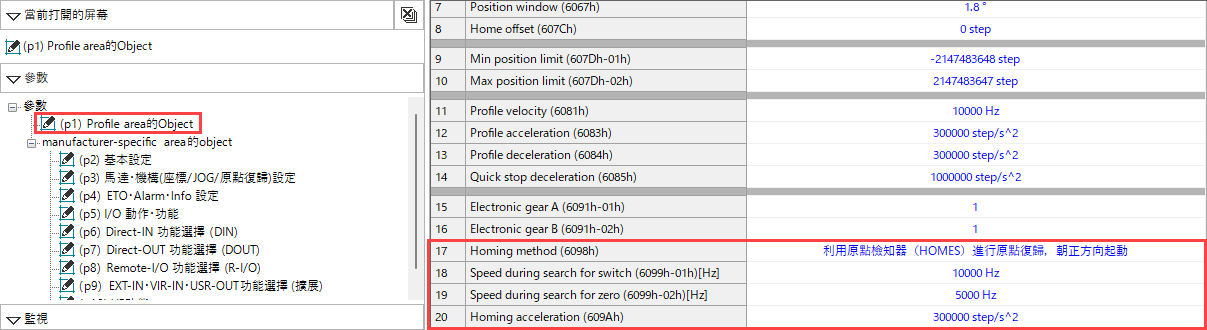
原點復歸的方法大略分為以下兩種。請利用「原點復歸方法物件(6098h)」設定要使用哪種原點復歸。
- 如為Cyclic同步位置模式(CSP),由於是在上位管理座標,請使用MC命令等功能方塊來進行原點復歸運轉。
- 原點復歸方法亦可由MEXE02設定(Profile區域的物件)。
- 極限檢知器、原點檢知器請配線到AZ驅動器。
CiA402驅動器Profile的原點復歸運轉
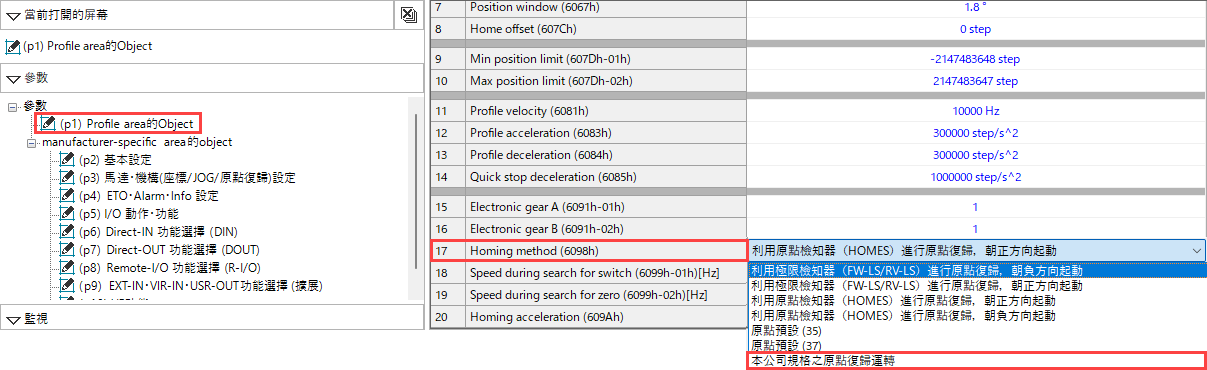
支援CiA402的原點復歸方法如下。
- 利用原點檢知器(HOMES)進行原點復歸,朝正方向起動(24) ※初始值
- 利用原點檢知器(HOMES)進行原點復歸,朝負方向起動(28)
- 利用極限檢知器(FW-LS/RV-LS)進行原點復歸,朝負方向起動(17)
- 利用極限檢知器(FW-LS/RV-LS)進行原點復歸,朝正方向起動(18)
- 原點預設(35、37)(35與37動作相同)
本公司規格的原點復歸運轉
將「原點復歸方法(6098h)」設定為「-1」,即是本公司規格的原點復歸模式。本公司規格的原點復歸方法如下。
- 2檢知器(0)
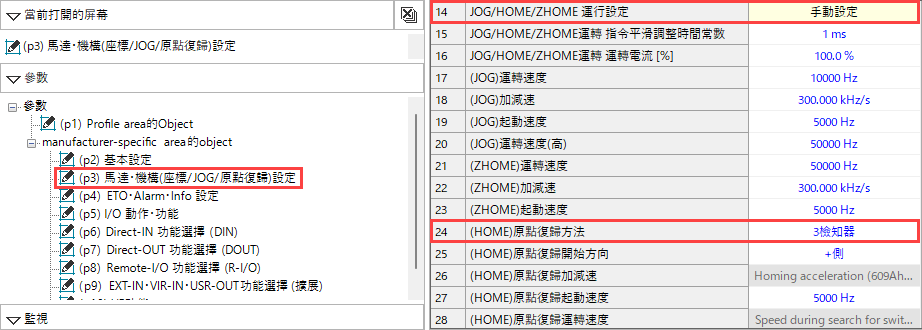
- 3檢知器(1)※初始值
- 單一方向旋轉(2)
- 推壓(3)
請利用「(HOME)原點復歸方法(4160h)」設定本公司規格的原點復歸方法。
- ※本公司規格的原點復歸方法亦可由資料設定軟體MEXE02設定。
變更時,請將「JOG/HOME/ZHOME運轉 運轉資訊設定(47F5h)」變更為「手動設定」。
產品種類:αSTEP 、網路對應產品・控制器 、電動模組產品
機種・系列: AZ系列 、搭載AZ系列的電動模組產品
内容: 使用方法、設定方法
FAQ No.: 576
相關的FAQ
寄送電子郵件至
客戶諮詢中心
客戶諮詢中心
確認郵件內容後,本公司將另行聯絡。此外,依據詢問的內容,可能會以電話直接聯絡,敬請見諒。