全方面支援自製機械手臂
導入機器人時,是否有「想在公司自製手臂」、「市售品的功能超出規格需求」、「雖想自製但不了解馬達的選用方法」等設計上的煩惱及不安呢?
此頁面以實際製作的DEMO機為基礎介紹重點。
同時對檢討自製手臂的客戶介紹相關的服務。
檢討採用之前,歡迎多加利用。
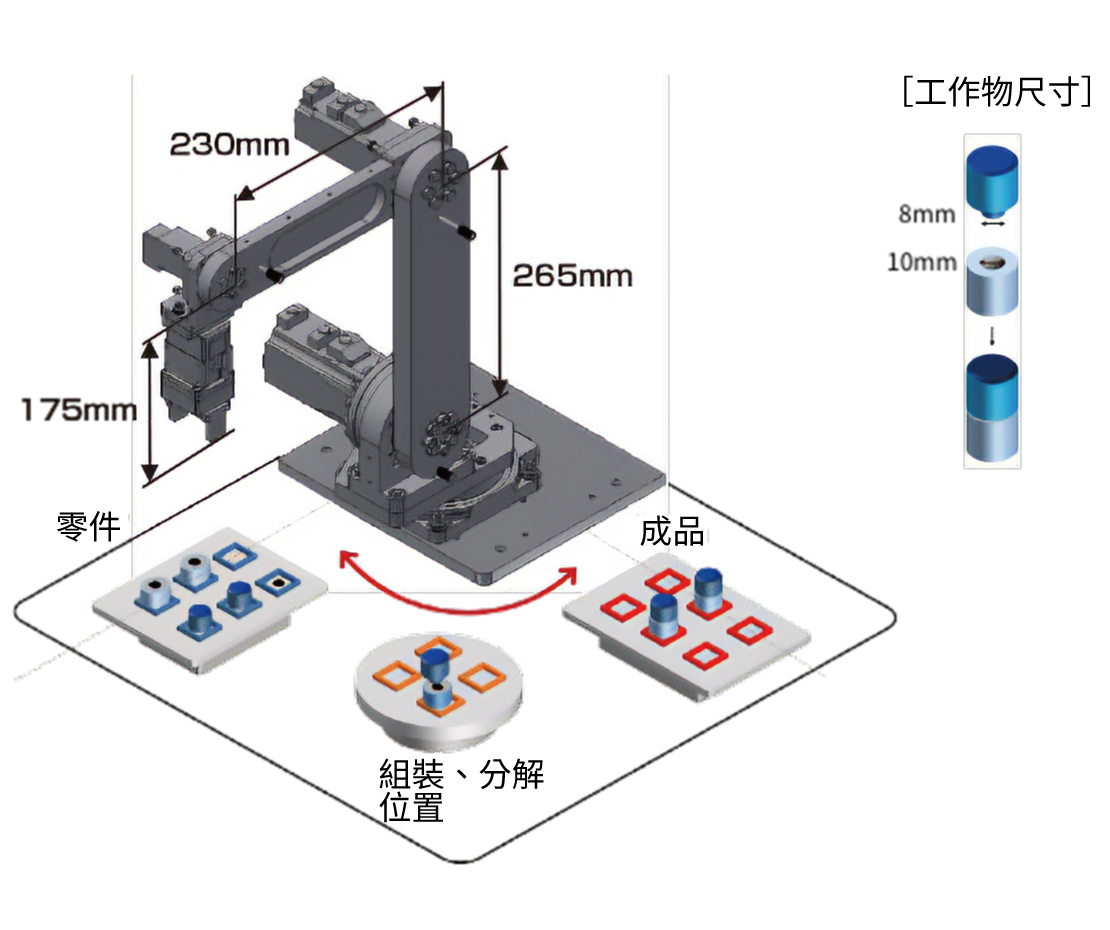
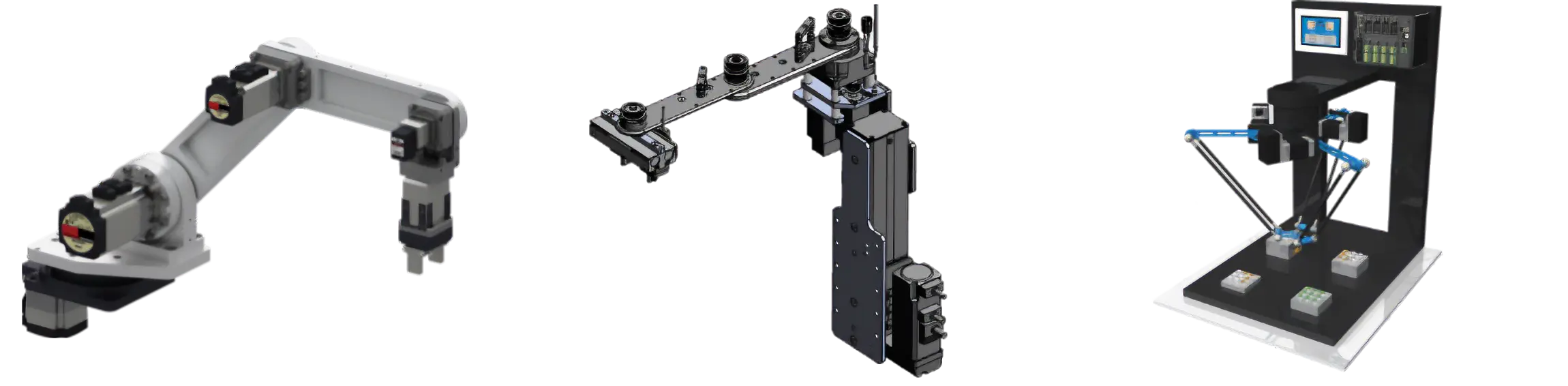
垂直多關節機器人DEMO機
DEMO機概要
模仿零件組裝工站的垂直多關節機器人DEMO機。
將2個零件取放到組裝位置,再移動到完成位置。
| 軸數 | 5軸 |
|---|---|
| 設置方法 | 落地式 |
| 機械手臂長度 | 653 mm |
| 工作物重量 | 300 g |
| 主電源 | AC 110V* |
| 重量 | 30 kg |
- *驅動器的驅動用、控制用電源為DC24V。
系統構成
各軸以MECHATROLINK-Ⅲ同步控制。
使用PLC的功能程序指定座標。


構成品一覽表
馬達、電動模組產品
| 軸 | 品名 | |
|---|---|---|
|
軸 1 
|
中空旋轉平台 | DGM130R-AZAK |
| 可動連接用電纜線*1 | CC020VZRA | |
|
軸 2 
|
馬達 | AZM66MK |
| 減速機 |
CSG-20-100-2UH-LW-SP-B
|
|
| 可動連接用電纜線套件 附電磁剎車馬達用*2 |
CC030VZRBA | |
|
軸 3 
|
馬達 | AZM46MK |
| 減速機 |
CSF-11-100-2UP-SP-C
|
|
| 可動連接用電纜線套件 附電磁剎車馬達用*2 |
CC030VZRBA | |
|
軸 4 
|
馬達 | AZM24AK |
| 減速機 |
CCSF-8-100-2UP-SP-A
|
|
| 可動連接用電纜線套件*2 | CC030VZ2RA | |
|
軸 5 
|
電動夾爪 | EH4-AZAKH |
| 可動連接用電纜線*1 | CC030VZ2RA | |
- *1
- 長度為2m。
- *2
- 長度為3m。
驅動器
| 軸 | 品名 | ||
|---|---|---|---|
|
軸 1 軸 4 軸 5 |

|
多軸驅動器 軸數3軸 | AZD3A-KM3 |
| 主電源用電纜線 | LC03D06A | ||
| 控制電源用電纜線 | LC02D06A | ||
|
軸 2 軸 3 |

|
多軸驅動器軸數2軸 | AZD2A-KM3 |
| 主電源用電纜線 | LC03D06A | ||
| 控制電源用電纜線 | LC02D06A | ||
- ※
 為Harmonic Drive Systems Inc.的註冊商標或商標。
為Harmonic Drive Systems Inc.的註冊商標或商標。 - ※
 為MECHATROLINK協會的註冊商標。
為MECHATROLINK協會的註冊商標。
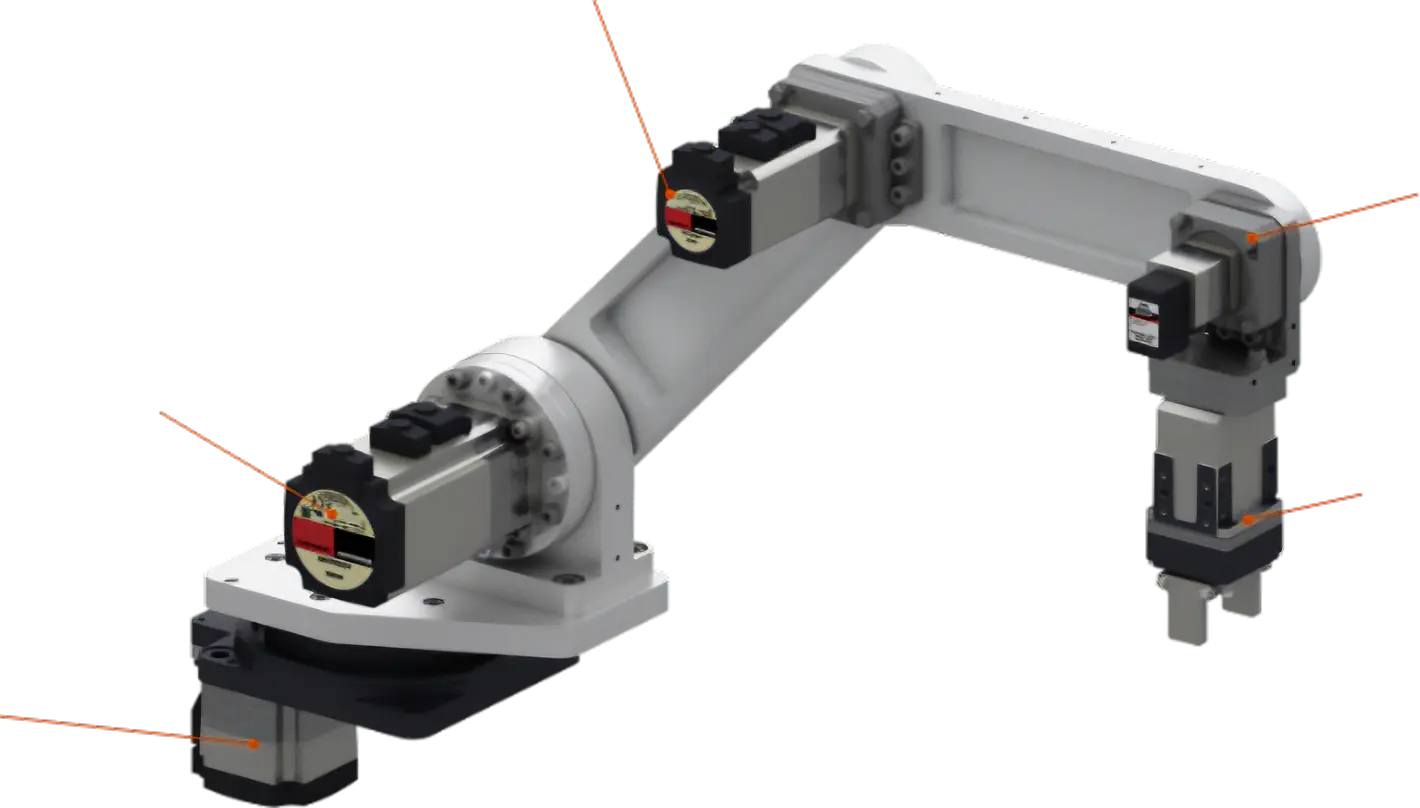
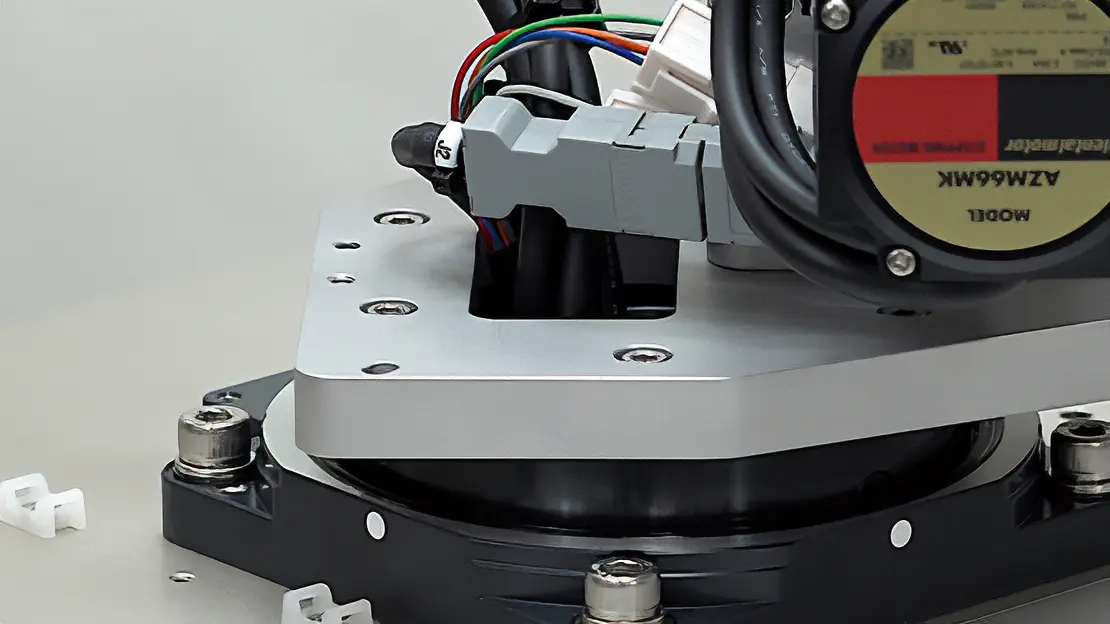
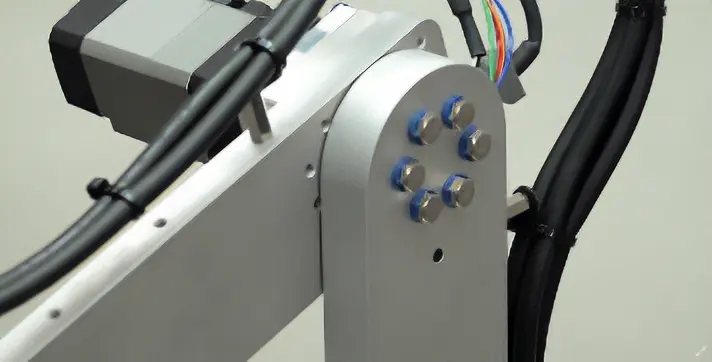
軸 ① - 機械手臂旋轉軸
<高載重、高剛性> 中空旋轉平台 DG II系列
為了承受機械手臂各種姿勢而增加的負載慣量,採用高載重、高剛性的平台
垂直多關節機器人抓取遠離軸①的工作物時,會產生較大的負載慣量。
DG II系列中空輸出平台採用Cross Roller軸承,實現了高容許慣量。
藉此可將機械手臂伸長,有助於擴大機器人的可動領域。
讓動力電纜線配線簡化
機器人搭載的動力電纜線集中於機械手臂的根部。大口徑中空孔 (貫穿)可用於活動空間複雜的配線、配管,簡化設備設計。
搭載機器

中空旋轉平台
DGII 系列
中空旋轉平台與αSTEP的一體型產品。模組產品內部為減速機構,可實現高輸出驅動。
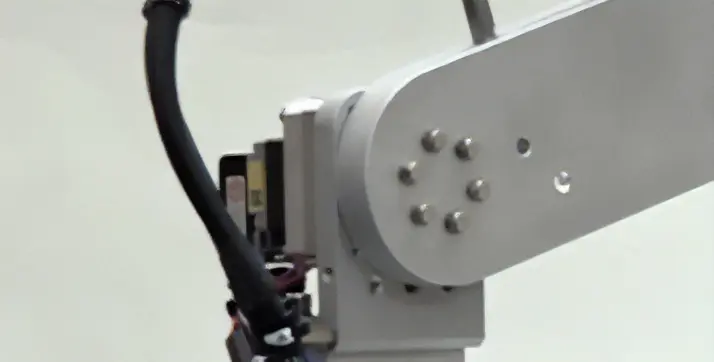
軸 ② - 關節軸
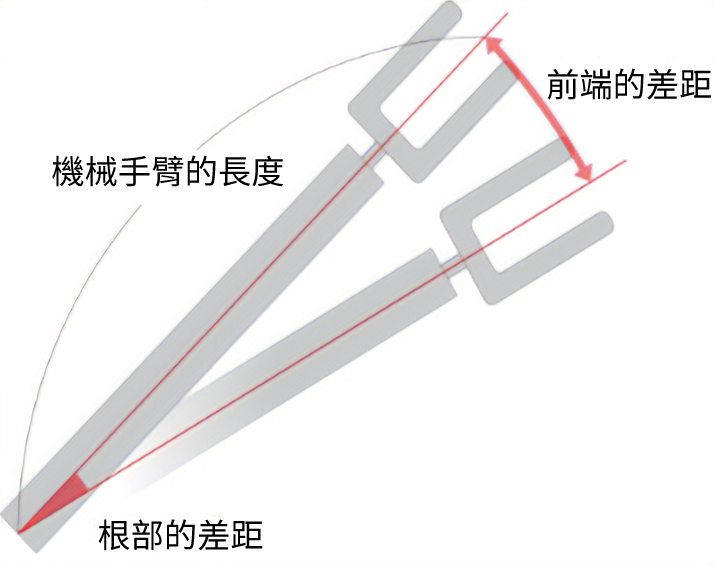


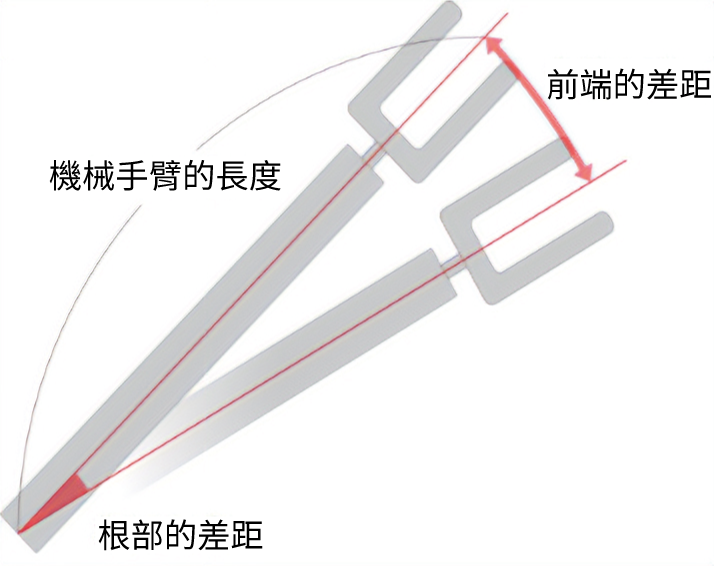
軸 ③, 軸 ④ - 關節軸
<超扁平、高剛性、無齒隙>
減速機 CSF mini系列 2UP型
減少機械手臂前端差距,實現高精度動作
靠近軸①的關節即使差距小,但機械手臂前端差距會被放大,有可能無法正確抓取工作物。
CSF mini系列由於使用無齒隙減速機,可抑制差距,實現正確的動作。
將關節軸輕量化,提高設計的自由度
由於將各關節軸前端輕量化,減小慣性慣量,如此即可降低機構零件的規格(轉矩或剛性)。
CSF mini系列輕量且高剛性,可直接安裝負載。
由於不需要連結零件,可讓機械手臂輕量化,有助於擴大設計的自由。
-
<軸③> -
<軸④>
搭載機器
CSF mini系列 2UP型
詳情請洽本公司或客戶諮詢中心。
軸 ⑤ - 末端效應器
<體積縮小、重量變輕> 電動夾爪 EH系列
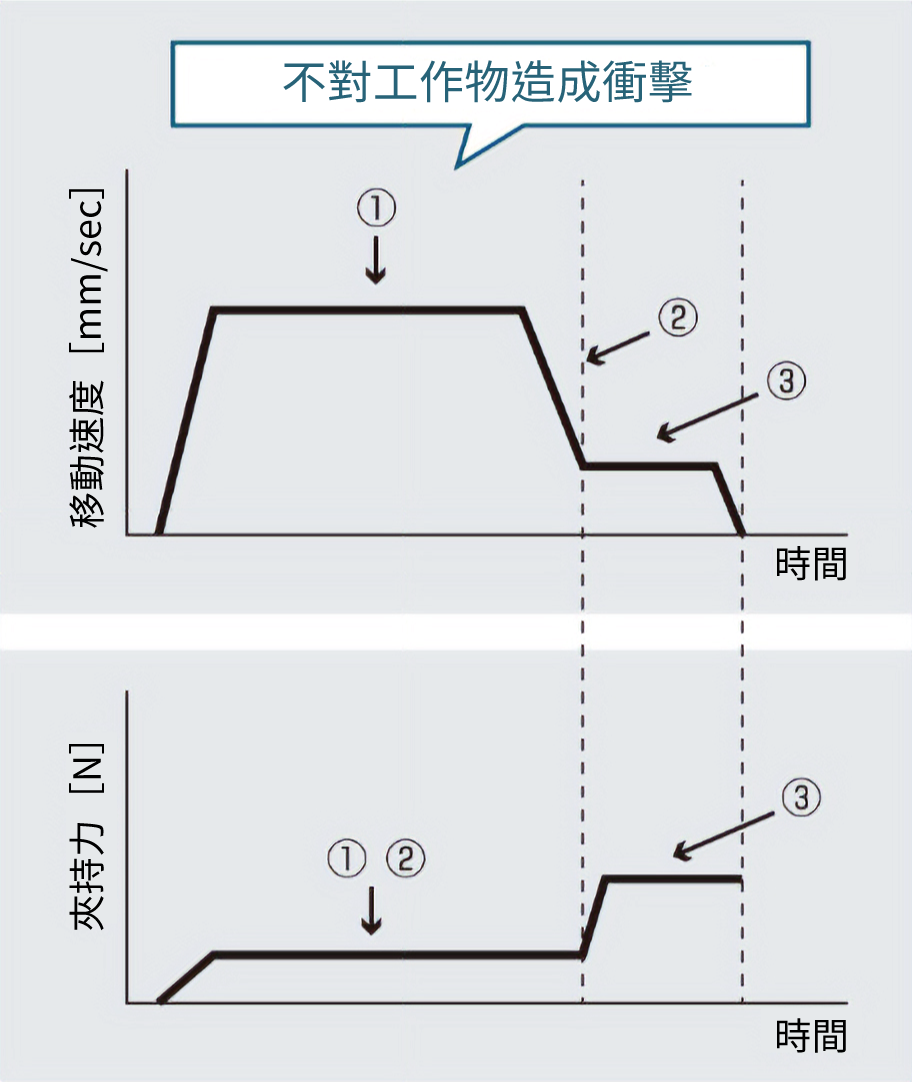
1台即可抓取各種工作物
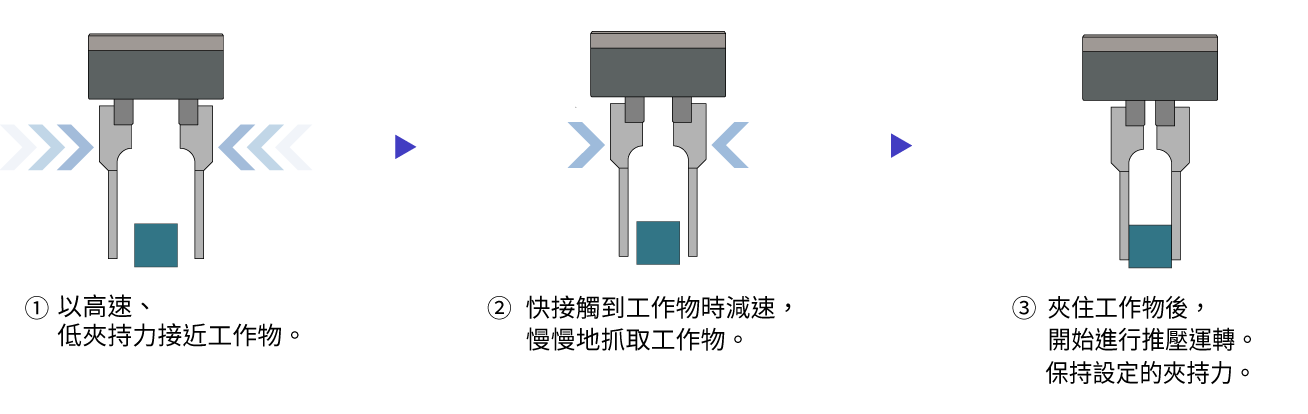
EH系列可自由設定夾持力,可對應各式各樣的工作物。
(行程25mm)
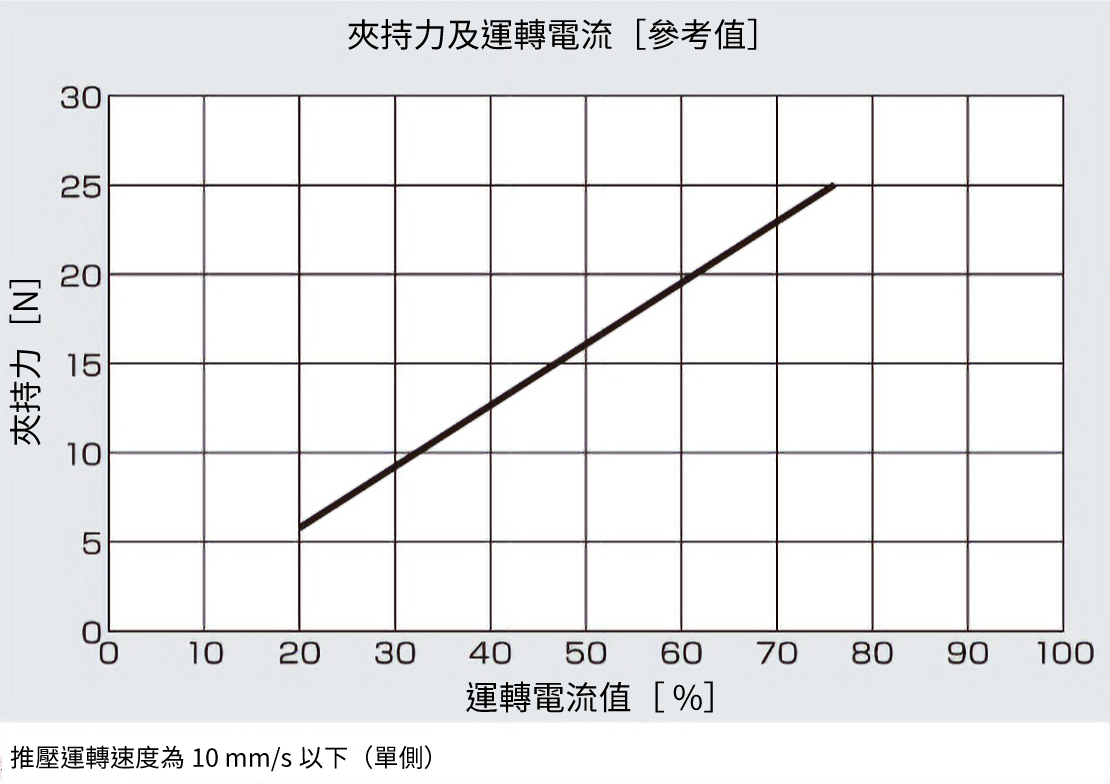
最大夾持力 25 N
[ 夾持力範圍(參考值)約6 N~25 N ]
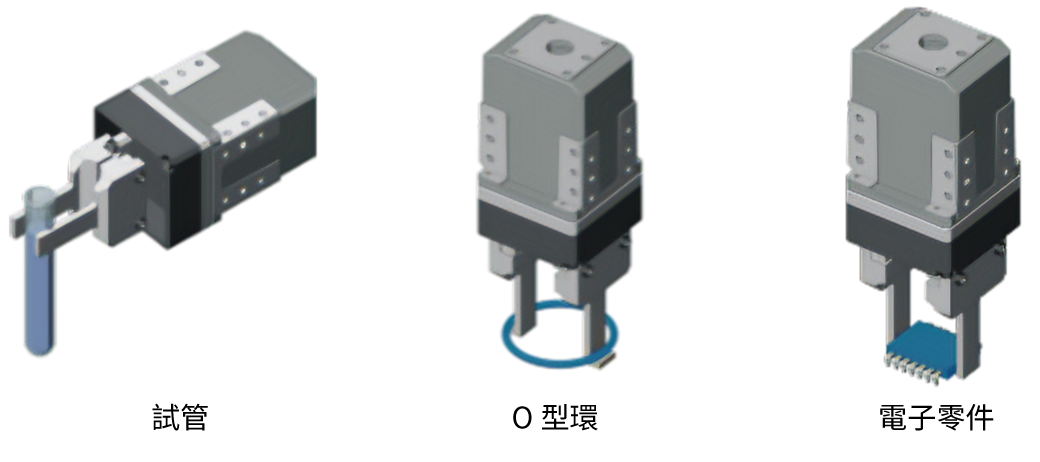
1台即可夾持各種工作物
搭載機器

電動夾爪搭載EH系列 αSTEP AZ系列
將齒條、齒輪機構與αSTEP AZ系列組合的電動夾爪。實現如人類手指般細緻的「抓取」動作,幫助自動化及節省人力。
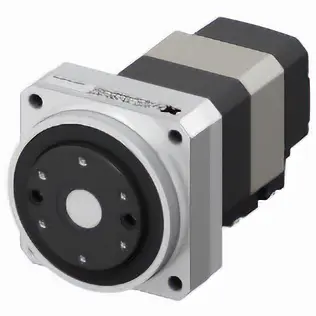
各軸共用
αSTEP AZ系列
使用機械式絕對式編碼器保持位置資訊
AZ系列搭載免電池機械式絕對式編碼器<ABZO 編碼器>. 定位運轉中即使電源被緊急停止或因停電而被阻隔,仍可保持位置資訊。

備有豐富的產品種類
備有豐富的安裝尺寸或轉矩特性、附電磁剎車等產品種類。
可配合各軸選用最適合的馬達。
驅動器(多軸驅動器)
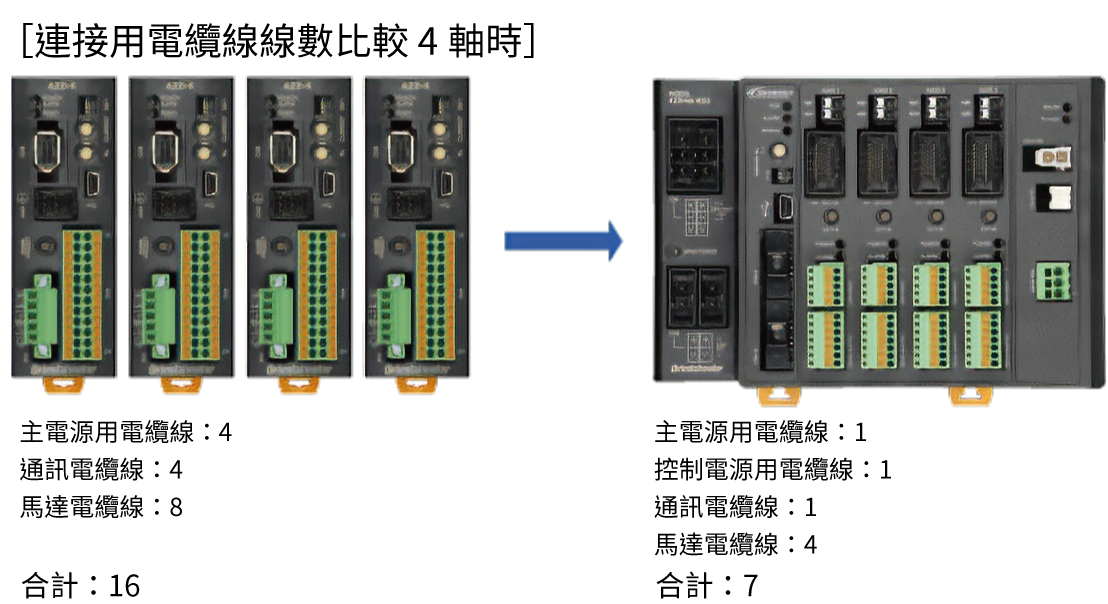
彙整驅動器,實現節省配線
多軸驅動器可連接2~4軸的馬達。
由於可彙整於1台驅動器,與上位機器的連接用電纜線或電源電纜線等可節省配線。
對應各式各樣的MOTION網路
備有對應MECHATROLINK-III, EtherCAT, SSCNET III/H驅動器Profile的產品。
搭載機器

搭載αSTEP 絕對式編碼器(無需電池)AZ系列
αSTEP採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。不需要電池即可實現絕對式系統定位。以實惠價格實現了先進的定位。

αSTEP AZ系列 多軸驅動器 DC電源輸入
可連接本公司AZ系列DC電源輸入的馬達,以及搭載上述馬達的電動模組產品之多軸驅動器。分別提供對應SSCNET III/H、MECHATROLINK-III、EtherCAT驅動器Profile的產品。
從產品選用階段開始,支援自製手臂
支援馬達選用
專責工作人員協助客戶選用馬達。委託時請提供現有的機構概略圖或示意圖。除了垂直多關節機器人外,也可對應選用SCARA機器人、並聯式機器人。
請就近洽詢客戶諮詢中心。
-
準備DEMO機相關資料
對於介紹的垂直多關節機器人DEMO機備有相關資料。各軸尺寸、機械手臂長度等的硬體相關資訊,請洽本公司或客戶諮詢中心。