close
※您也可以搜尋和比較舊產品和替代品。
近年來人工成本高漲,「以機器人取代人工作業」的需求逐漸提高了呢。
是啊。除了購買符合必要作業、動作的機器人之外,也時常聽聞想要自行組裝特定用途的機器人。官網上也有公開使用7軸多關節機器人DEMO機的影片。
老實說,使用自行組裝機器人的客戶正在煩惱「有時無法正確定位」的問題。 雖然有使用減速機型馬達了…。
會不會是機構上有問題?減速機精度也有可能是原因之一。達弟,還記得齒隙是什麼嗎?
我沒有信心能好好說明。
來,我們一起複習一下。說不定能找到解決客戶問題的線索。
麻煩了!
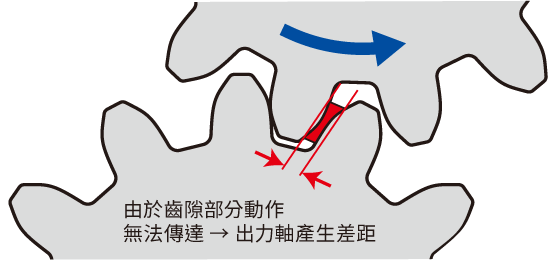
齒隙是指「齒輪與齒輪間在設計上保留的縫隙」。
縫隙聽起來好像有點落漆,這是有必要的嗎?
縫隙是必要的喔。如果齒輪與齒輪之間沒有縫隙,組裝時彼此是互相緊密推壓的狀態,則會因負載過高而無法轉動。
所以才有必要設計適當的縫隙啊。
若是只往單一方向運轉,相同的齒輪與齒輪會持續接觸,縫隙就不會造成問題。但是,像機器人這樣往復運轉時,齒輪及齒輪間的縫隙,會導致無法完全到達目標位置。
原來如此。但是減速機的縫隙對設備整體來說應該微不足道吧。會怎樣影響機器人呢?
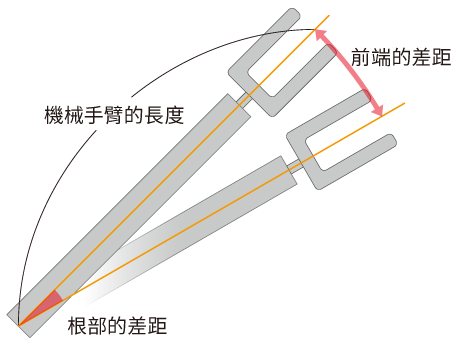
你看一下圖2。看得出來馬達附近及機械手臂的前端差距很大吧。
真的呢。這是相似三角形的原理!
應該可以理解齒隙對機器 人前端的差距有很大的影 響了吧。 特別是機器人對精度的要求很高,因此減速機齒輪大多會使用加上斜度,或2個齒輪由雙方向互夾的特殊機構,盡可能將縫隙縮減到極限的產品(低齒隙)或者使用齒輪形狀本身設計 為組裝後無縫隙的產品(無齒隙)。詳細資訊可以查看這裡。
好的!看來可以用這個去提案了。
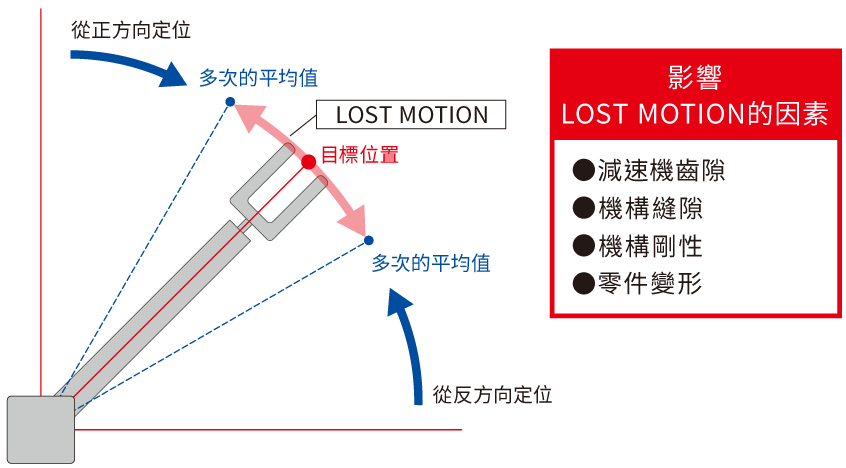
等一下。針對這次的問題,我想也需要再複習一下LOST MOTION。
LOST MOTION嗎?
這是指使用設備反覆測試「某個位置,由正轉方向及逆轉方向定位時的最大差」的數值。JIS規格有規定,你去查看看。
明明設計了齒隙,但又用設備來反覆測試LOST MOTION?
這是因為設備就如同此次的機器人一樣,是由各種機械要素所構成的。必須考慮所有要素的影響才行。
原來如此。所以,反覆測試是有必要的。
若是要讓機器人能定位到目標位置,不只馬達,還需要對構成要素一一審視其精度。
沒錯。為了盡量減少影響,建議選擇減速機時盡可能選擇齒隙小的產品!
這就對了。加油!
αSTEP
「教教我吧!馬姐」正在募集大家的問題。請告訴我們想要讓馬姐解說的問題、或是經常遇到的馬達相關疑問。
※您提交的意見可能會作為「教教我吧!馬姐」的主題。 我們不會直接回覆您提交的內容,敬請見諒。