小型電動缸規格
導程
馬達旋轉一圈,滾珠螺桿沿直線方向移動的距離。
反覆定位精度
表示在同一方向上對同一位置重複進行定位時所產生誤差量的值。
(精度值是在恆定溫度和恆定負載下測量的。)
反覆定位精度是在①前端和②直線導軌上測量的。
除非另有說明,其他項目都是常見的。
LOST MOTION
表示在不同方向對同一位置進行定位時所產生誤差量的值。
(精度值是在恆定溫度和恆定負載下測量的。)
最小移動量
預設值為1step的移動量。
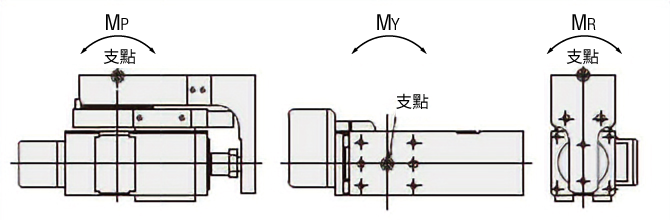
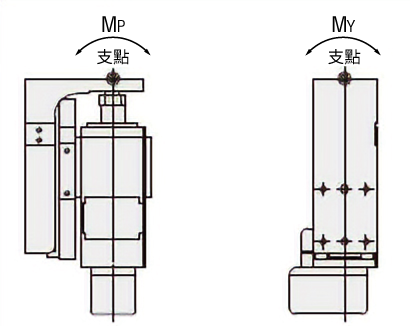
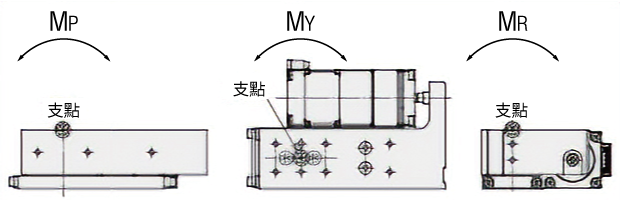
容許慣量
當負載偏離小型電動缸導軌的中心時,會施加使導軌旋轉的力。
這是導軌可以承受的最大力道。
動容許慣量是指運轉中能容許的力矩。
靜容許慣量是指馬達停止狀態時能容許的力矩。
附平台型
-
水平向
-
垂直向
工作台型
-
水平向
-
垂直向
附線性襯套型
-
水平向
-
垂直向
可搬重量
水平向
小型電動缸水平使用時,在額定工作性能下可移動的最大重量。
垂直向
小型電動缸垂直使用時,在額定工作性能下可移動的最大重量。
推力
等速運轉時推動負載的最大力。
推壓力
推壓運轉時施加到負載上的最大壓力。
保持力
馬達停止且通電時的最大保持力。
行程
負載可以運輸、推拉的最大距離。
最高速度
可搬重量可被移動的最高速度。
最大加速度
可搬重量可被移動的最大加速度。
導程
馬達旋轉一圈螺桿沿直線方向移動的距離。
電磁剎車(無激磁作動型)
本產品有附電磁剎車無激磁作動型和無電磁剎車無激磁作動型。
垂直驅動時請選擇帶有電磁剎車的類型。
反覆定位精度
表示在同一方向上對同一位置重複進行定位時所產生誤差量的值。
(精度值是在恆定溫度和恆定負載下測量的。)
反覆定位精度是在①前端和②直線導軌上測量的。
除非另有說明,其他項目都是常見的。
LOST MOTION
表示在不同方向對同一位置進行定位時所產生誤差量的值。
(精度值是在恆定溫度和恆定負載下測量的。)
最小移動量
DRS2系列
預設值為1step的移動量。
DRLII系列
預設設定驅動器上的STEP開關和R2/R1開關時每個脈波的移動量。
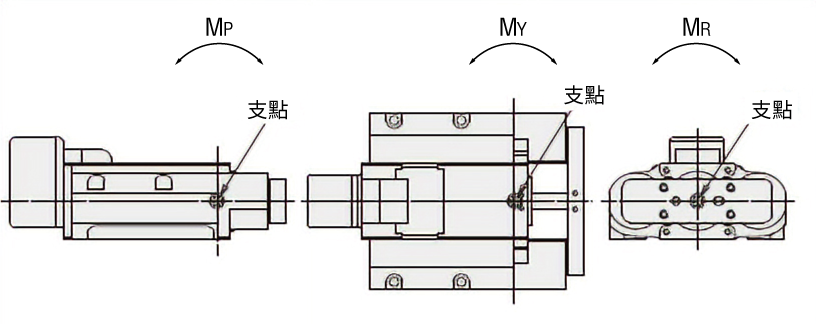
容許慣量
當負載偏離小型電動缸導軌的中心時,會施加使導軌旋轉的力。
這是導軌可以承受的最大力道。
動容許慣量是指運轉中能容許的力矩。
靜容許慣量是指馬達停止狀態時能容許的力矩。
附導軌型
-
水平向
-
垂直向
工作台型(僅限DRLII系列)
運轉平行度(僅限DRLⅡ系列工作台型)
從小型電動缸的安裝面到工作台頂面的高度方向擺動幅度。
可搬重量
水平向
小型電動缸水平使用時,在額定工作性能下可移動的最大重量。
垂直向
小型電動缸垂直使用時,在額定工作性能下可移動的最大重量。
推力
速度恆定時推動負載的最大力。
推壓力(僅限DRS2系列)
推壓運轉時施加到負載上的最大壓力。
保持力
通電狀態下馬達停止、電磁剎車動作時的最大保持力。
行程
負載可以運輸、推拉的最大距離。
最高速度
運輸負載的最高速度。
最大加速度(僅限DRLⅡ系列)
可搬重量可被移動的最大加速度。
反覆定位精度
表示在同一方向上對同一位置重複進行定位時所產生誤差量的值。
(精度值是在恆定溫度和恆定負載下測量的。)
反覆定位精度是在①前端和②直線導軌上測量的。
除非另有說明,其他項目都是常見的。
LOST MOTION
從不同方向定位特定點時所產生的差值。
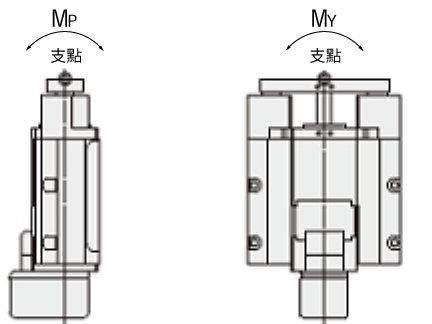
最大負載慣量
當負載偏離模組產品導軌中心時,會產生使導軌旋轉的力。
這是導軌可以承受的最大力道。
附導軌型
-
水平向
-
垂直向
工作台型(僅限DRLⅡ系列)
運轉平行度(僅限DRLⅡ系列工作台型)
從模組產品安裝面到工作台頂面的高度方向的擺動幅度。
行程
推拉負載的最大距離。
導程
馬達旋轉一圈螺桿沿直線方向移動的距離。
解析度
馬達轉動1個脈波時螺桿移動的距離。
最大可搬重量
水平向
模組產品水平使用時,在額定工作效能下可移動的最大重量。
垂直向
垂直使用模組產品時,在額定工作效能下可移動的最大重量。
最大推力
運轉速度恆定時推動負載的最大力。
最大保持力
最大保持力是電流削減(停止電流50%)時的保持力。關閉電源時保持力為0。電磁剎車的最大保持力與最大保持力的值相同。
最高速度
可搬重量被移動的最高速度。