無刷馬達 BX系列
BX230CM-20FR

減速機/馬達/回路


該產品已不再銷售
| 產品類別 | 品名 | 單價未稅 | 出貨日 |
|---|---|---|---|
| 減速機/馬達/回路 | BX230CM-20FR | - | 停止生產的產品(2019.3.31 停止生產) |
附件
- 馬達,減速機, 回路, 外部調速器 (附信號線), 回路安裝腳座 (附螺絲), 安裝用螺絲, 平行鍵, 安全外蓋 (附螺絲), 使用說明書
規格
特性

轉速-轉矩特性
外形圖

馬達/減速機

回路
資料下載
其他規格
通用規格
| 項目 | 規格 |
|---|---|
| 輸入信號* | 光耦合器輸入方式 輸入電阻 2.3kΩ內部電源電壓+15V CW輸入、CCW輸入、轉速資料選擇輸入、馬達控制釋放(FREE)輸入、 剎車輸入(Alarm輸出時:Alarm重設輸入) |
| 輸出信號* | 開集極輸出DC4.5~26.4V Alarm輸出、忙輸出(Alarm輸出時:Alarm脈波輸出):40 mA以下 速度輸出ASG、BSG:20mA以下 |
| 保護功能 | 當下列保護功能動作時,馬達自由停車, (附電磁剎車馬達將被剎車)並且Alarm輸出將被關閉。 驅動器Alarm LED將閃爍括號中所示的次數(將輸出Alarm脈波)。
|
| 最大延長距離 | 馬達和驅動器距離20.4 m(使用周邊機器連接用電纜線時) |
| 額定時間 | 連續 |
-
*基本品名和系統升級時以及系統升級時速度控制模式和位置控制模式之間可用的輸入信號和輸出信號不同。
一般規格
| 項目 | 馬達 | 驅動器 | |
|---|---|---|---|
| 絕緣電阻 | 在正常環境溫度和濕度下連續運轉後,利用DC500V高阻錶測量線圈與外殼之間其值為100MΩ以上。 (編碼器除外) |
於正常環境溫度和濕度下連續運轉後,以DC500V高阻錶測量電源端子與外殼間、電源端子與輸出入信號端子間時,測量值在100MΩ以上。 |
|
| 絕緣耐壓 | 在正常環境溫度與濕度下進行連續運轉後,即使對線圈與外殼間,施以50Hz、AC1.5kV的電壓1分鐘,也沒有確認到異常。 (編碼器除外) |
在正常環境溫度與濕度下進行連續運轉後,即使在電源端子和外殼之間施加AC1.5kV、50Hz 的電壓或在電源端子和輸出入信號端子之間施加AC1.8kV、50Hz 的電壓1 分鐘,也沒有觀察到異常。 |
|
| 溫度上升 | 在正常環境溫度和濕度下額定連續運轉後, 使用熱電偶法則測量線圈溫升的值為 50 °C以下, 外殼表面的溫升為40 °C *1以下 。 |
在正常的溫度與濕度下進行額定連續運轉後,以熱電偶法則測量散熱板溫度上升的值在50°C以下。 |
|
| 使用環境 | 環境溫度 | 0~+50°C(無凍結) | |
| 環境濕度 | 85% 以下(無結露) | ||
| 標高 | 海拔1000m以下 | ||
| 環境 | 不能在腐蝕性氣體、無灰塵、放射性物質、磁場、真空等特殊環境下使用 | ||
| 振動 | 不可施加連續的振動或過度的衝擊。遵循JIS C 60068-2-6 正弦波振動測試方法標準 頻率範圍:10∼55 Hz、單振幅:0.15 mm 掃描方向:3方向(X、Y、Z) 掃描次數:20次 |
||
| 保存環境*2 | 環境溫度 | -20~+60°C(無凍結) | -25~+70°C(無結凍) |
| 環境濕度 | 85% 以下(無結露) | ||
| 標高 | 海拔3000m以下 | ||
| 耐熱等級 | UL/CSA規格:105 (A),EN規格:120 (E) | − | |
| 保護等級 | IP54(不含圓軸型的安裝面及連接器部) | IP10 | |
- *1
- 對於圓軸型,安裝至以下尺寸之一的散熱板(材質:鋁),以保持馬達外殼表面溫度在90 °C以下。
30 W 型:115×115 mm,厚度 5 mm,60 W 型:135×135 mm,厚度 5 mm,120 W 型:165×165 mm,厚度 5 mm,
200W型:200×200mm,厚度5mm,400W型:250×250mm,厚度6mm - *2
- 保存環境為包含輸送在內的短期間數值。
注意事項
- 請勿在馬達與驅動器連接的情況下測量絕緣電阻或進行絕緣耐壓測試。
速度控制規格
- 標準型 這些規格適用於使用標準的馬達和驅動器的組合產品時。
- 系統升級時:這些規格適用於使用另售的資料設定器(OPX-1A or MEXE01)。
| 項目 | 標準型 | 系統升級時 |
|---|---|---|
| 速度控制範圍 | 30~3000r/min(類比設定時) | 30~3000r/min(類比設定時) 3~3000r/min(數位設定時以1r/min為單位設定) |
| 速度設定方法 | 使用下列方法之一。
|
使用下列方法之一。
|
| 加速時間、減速時間 | 0.1~15秒(空載時3000 r/min) 加速時間和減速時間對於所有速度資料都是通用的 |
使用下列方法之一。 (空載時3000 r/min)
|
| 多段速設定方法 |
2 速:
1速由內部速度設定器控制,1速由外部速度設定器(20kΩ,1/4W)或外部直流電壓(DC0~5V)控制。
|
使用下列方法之一。
|
容許懸吊載重、容許推力載重
裝配型・平行軸減速機
| 品名 | 減速比 | 容許懸吊載重 | 容許推力載重 N |
|
|---|---|---|---|---|
| 距出力軸前端10 mm N |
距出力軸前端20 mm N |
|||
| BX230■-□S | 5 | 100 | 150 | 40 |
| 10、15、20 | 150 | 200 | ||
| 30、50、100、200 | 200 | 300 | ||
| BX460■-□S | 5 | 200 | 250 | 100 |
| 10、15、20 | 300 | 350 | ||
| 30、50、100、200 | 450 | 550 | ||
| BX5120■-□S | 5 | 300 | 400 | 150 |
| 10、15、20 | 400 | 500 | ||
| 30、50、100、200 | 500 | 650 | ||
| BX6200■-□S BX6400S-□S BX6400SM-□S |
5、10、15、20 | 550 | 800 | 200 |
| 30、50 | 1000 | 1250 | 300 | |
| 100、200 | 1400 | 1700 | 400 | |
裝配型・中空軸扁平式減速機
| 品名 | 減速比 | 容許懸吊載重 | 容許推力載重 N |
|
|---|---|---|---|---|
| 距減速機安裝面10 mm N |
距減速機安裝面20 mm N |
|||
| BX230■-□FR | 5、10 | 450 | 370 | 200 |
| 15、20、30、50、100、200 | 500 | 400 | ||
| BX460■-□FR | 5、10 | 800 | 660 | 400 |
| 15、20、30、50、100、200 | 1200 | 1000 | ||
| BX5120■-□FR | 5、10 | 900 | 770 | 500 |
| 15、20 | 1300 | 1110 | ||
| 30、50、100、200 | 1500 | 1280 | ||
| BX6200■-□FR BX6400S-□FR BX6400SM-□FR |
5*、10 | 1230 | 1070 | 800 |
| 15、20 | 1680 | 1470 | ||
| 30、50、100 | 2040 | 1780 | ||
- *僅有BX6400S-□FR, BX6400SM-□FR。
圓軸型
| 品名 | 容許懸吊載重 | 容許推力載重 | |
|---|---|---|---|
| 距出力軸前端10 mm N |
距出力軸前端20 mm N |
||
| BX230■-A | 87.2 | 107 | 馬達重量的一半以下 |
| BX460■-A | 117 | 137 | |
| BX230■-A | 156 | 176 | |
| BX6200■-A BX6400S-A BX6400SM-A |
197 | 221 | |
計算容許徑向載重
容許懸吊載重的計算公式因機構而異。
負載軸的單側無任何軸承組合時
懸吊載重是最困難的機構。建議使用段狀負載軸。
F0 [N]:
凸緣安裝面位置的容許懸吊載重
Lp [mm]:
凸緣安裝面至懸吊載重點的距離
B [mm]:
凸緣安裝面至軸承組合的距離
| 品名 | 容許懸吊載重 W[N] |
|---|---|
| GFS2G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{36}{36 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS4G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{40}{40 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS5G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{50}{50 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| GFS6G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{60}{60 + \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
負載軸的單側有軸承組合時
| 品名 | 容許懸吊載重 W[N] |
|---|---|
| GFS2G□FR GFS4G□FR GFS5G□FR GFS6G□FR |
\(\begin{align} \mathrm{W} [\mathrm{N}] = \frac{\mathrm{B}}{\mathrm{B} - \mathrm{Lp}} \times \mathrm{F}_0 [\mathrm{N}] \end{align}\)
|
| 品名 | 轉速 | 減速比 | F0 [N] |
|---|---|---|---|
| GFS2G□FR | 3~3000r/min時 | 5、10 | 570 |
| 15~200 | 630 | ||
| 4000 r/min時 | 5、10 | 520 | |
| 15~200 | 580 | ||
| GFS4G□FR | 3~3000r/min時 | 5、10 | 1000 |
| 15~200 | 1500 | ||
| 4000 r/min時 | 5、10 | 910 | |
| 15~200 | 1370 | ||
| GFS5G□FR | 3~3000r/min時 | 5、10 | 1080 |
| 15~20 | 1550 | ||
| 30~200 | 1800 | ||
| 4000 r/min時 | 5、10 | 980 | |
| 15、20 | 1430 | ||
| 30~200 | 1680 | ||
| GFS6G□FR | 3~3000r/min時 | 5、10 | 1430 |
| 15、20 | 1960 | ||
| 30~100 | 2380 | ||
| 4000 r/min時 | 5、10 | 1320 | |
| 15、20 | 1810 | ||
| 30~100 | 2210 |
關於上下驅動 (捲下運轉)
BX能夠在捲下運轉過程中實現穩定的速度控制。
如下圖所示,垂直運轉(捲下運轉)時,通常是外力使馬達旋轉,起到發電機的作用。如果該能量施加到驅動器上,就會發生異常。
周邊機器的回生電阻(另售)可將回生能量轉換為熱能的型態釋出。當馬達垂直運轉或急煞車產生較大慣性時,請使用周邊機器的回生電阻。
| 回生電阻品名 | 適用產品 | 連續回生電力 | 瞬間回生電力 |
|---|---|---|---|
| EPRC-400P | BX230(額定輸出 30 W) | 100 W | 240 W |
| BX460 (額定輸出 60 W) | |||
| BX5120 (額定輸出 120 W) | |||
| RGB100 | BX6200 (額定輸出 200 W) | 100 W | 800 W |
| BX6400 (額定輸出 400 W) |
- 請設置在具有與散熱板(材質:鋁 350×350mm 厚度3mm)同等散熱能力的地方。
關於回生電力
回生電力可使用以下公式估算,可作為參考。
回生電力 (W) = 0.1047 × TL [N·m] × N [r/min]
TL:負載轉矩 N: 轉速
- 請採用附電磁剎車型進行捲下運轉。
捲下運轉能力
- 連續捲下運轉超過連續回生電阻範圍將觸發內藏的過熱保護裝置(150°C)。
系統構成
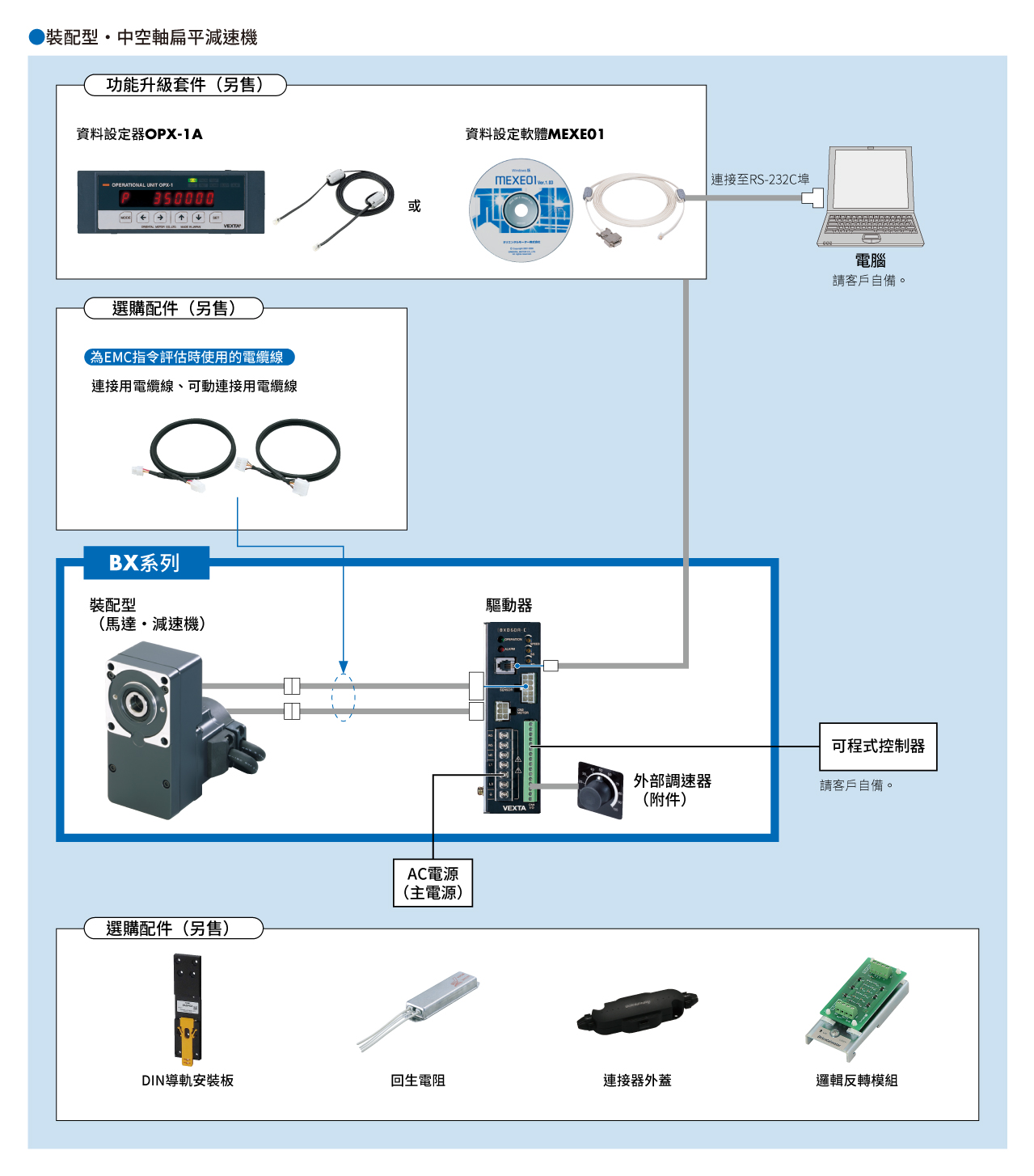
電纜線、周邊機器
您可以透過點選品名欄將其新增至「網路商店報價、訂購」。
close
close