電動模組產品

將馬達與滾珠螺桿等機構零件組合的產品。 無需自行組裝或調整。可提高設計作業的效率、縮短製作時間等。
網路對應
分別備有對應各種FA網路的驅動器。

給還不確定要哪種系列的您
相關資訊
查看有關小型機器人OVR 3軸卡氏坐標型的更多資訊

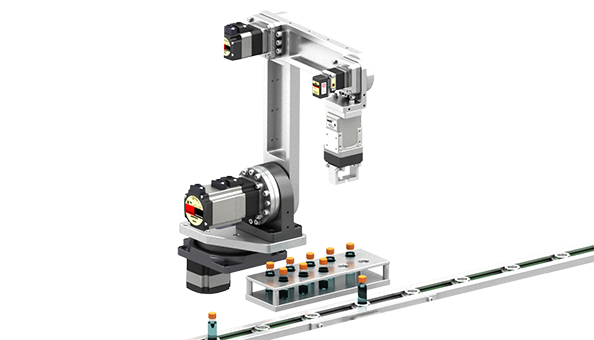
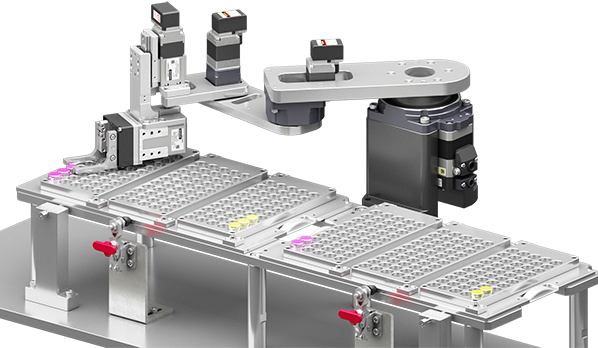
小型機器人OVR 3軸卡氏坐標型
由電動滑台和安裝腳座組成的3軸卡氏坐標型機器人在交付時已組裝完成。有助於減少設備設計、組裝和啟動時間。
了解更多資訊
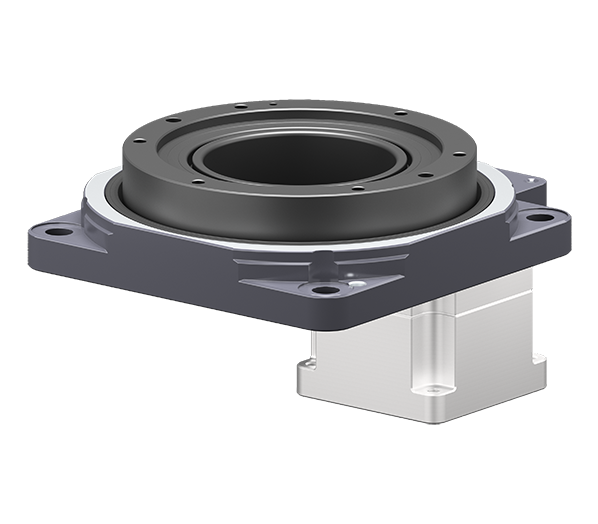
中空旋轉平台
DGII系列中空旋轉平台無馬達型
DGII系列的單體模組產品(無馬達型)。保持DGII系列的模組產品結構,透過聯軸器連接,可與各品牌伺服馬達搭配使用。適用於大慣性慣量驅動的應用。
替代品請點選此處
DGN130R2-18
DGN200R2-18