設備自製事例 工作物處理設備 (直交機器人、升降旋轉組合)
以本公司生產設備的實例說明工作物處理設備(直交機器人、升降旋轉組合)及產品選用的要點。
另外也一併介紹為支援設備設計所提供的服務。歡迎於檢討採用時多加洽詢。
設備實例 工作物處理設備
設備概要
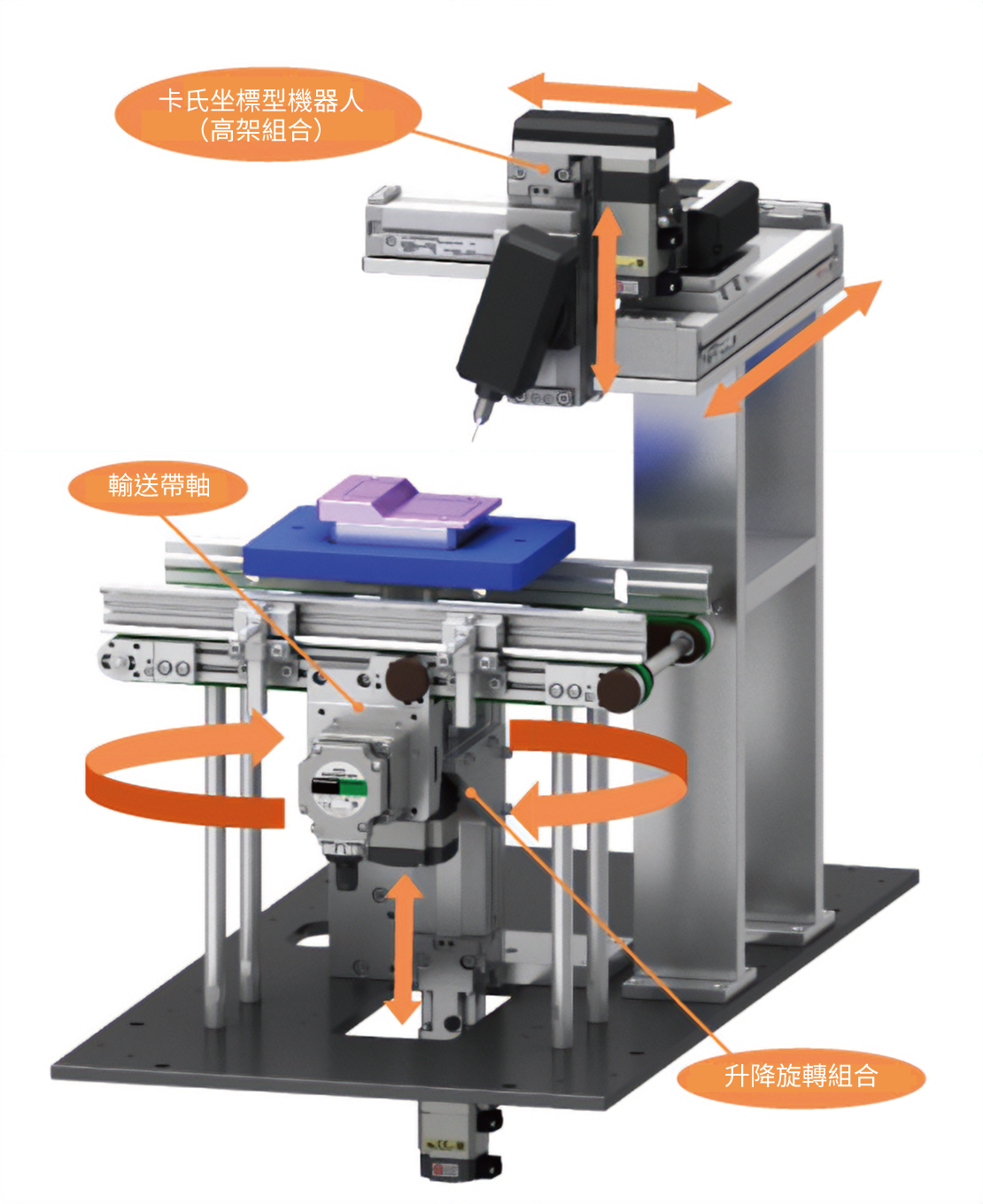
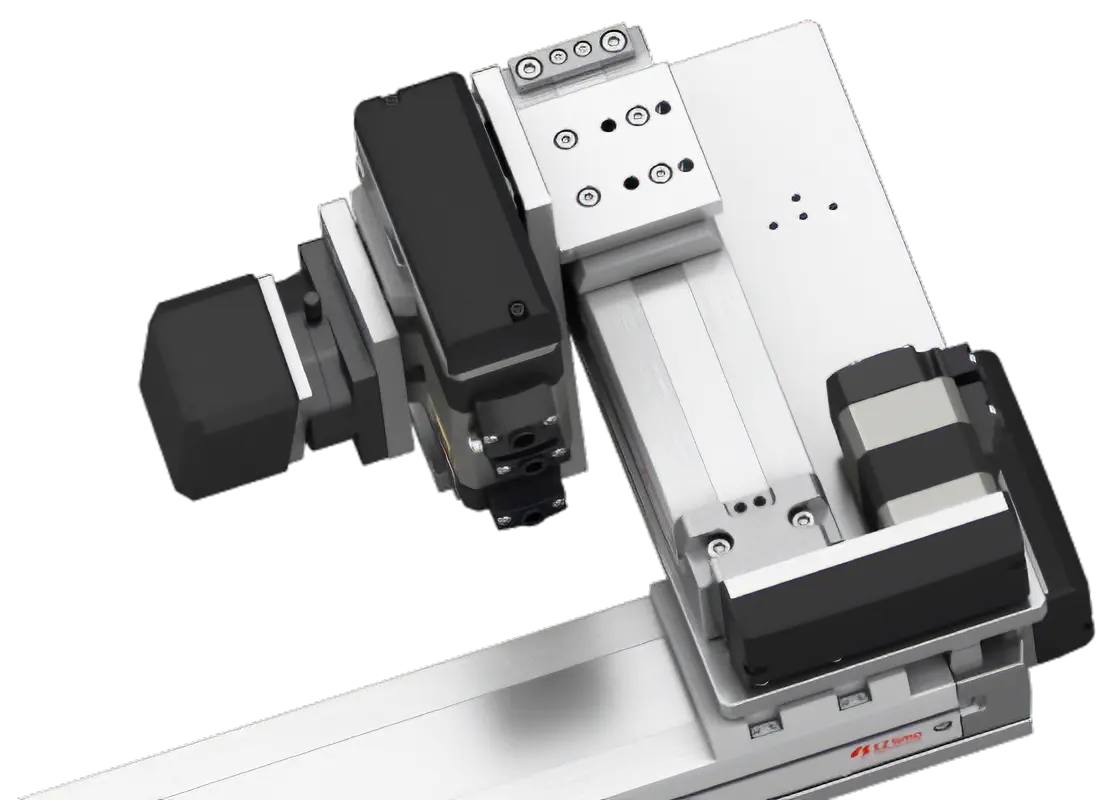
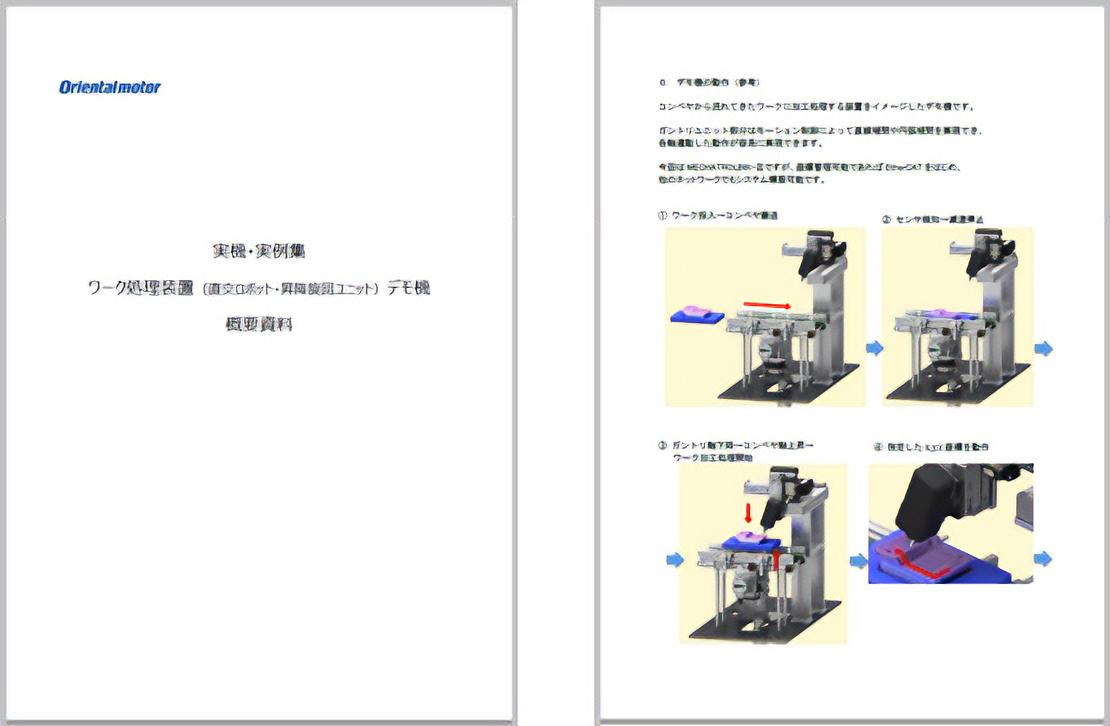
此設備會自動對輸送帶搬運過來的工作物進行液體塗布作業
將輸送帶搬運過來的工作物依加工位置透過升降旋轉組合上升、旋轉,並以直交機器人(高架組合)處理各種尺寸、形狀的工作物。
本次的設備用於分注器的液體塗布,但也可應用在其他用途。
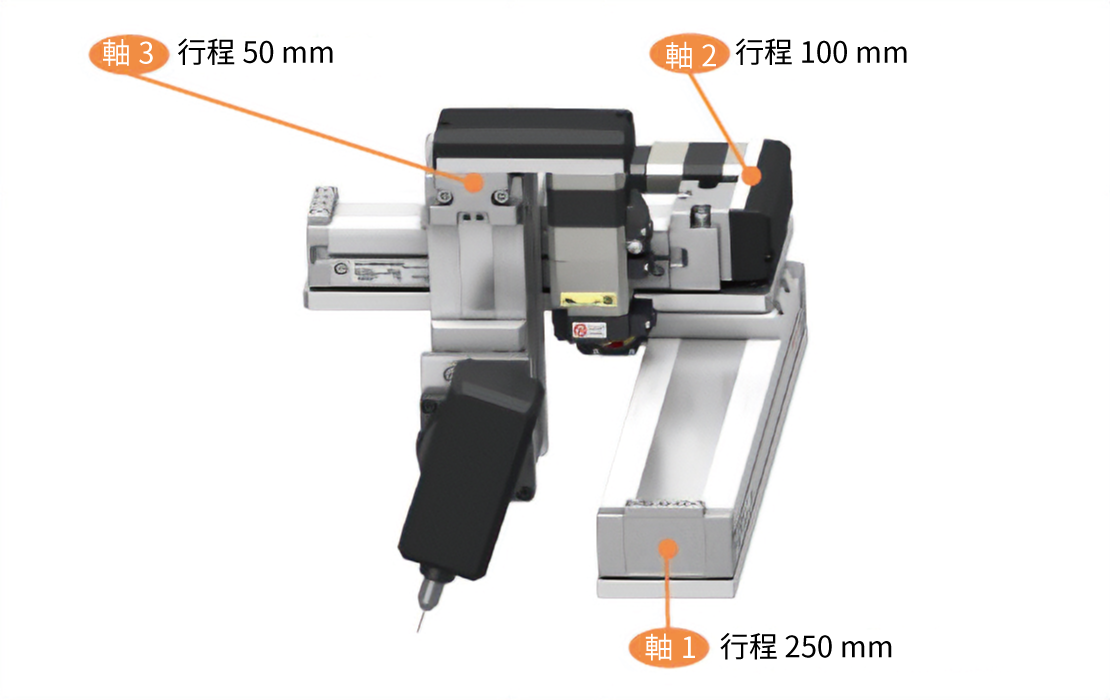
直交機器人(高架組合)
| 軸数 | 3軸 | ||
|---|---|---|---|
| 軸1(x) | 軸2(y) | 軸3(z) | |
| 行程 | 250mm | 100mm | 50mm |
| 最高速度※1 | 340mm/s | 400mm/s | 85.7mm/s |
| 最大可搬重量※2 | 1.5kg | ||
| 反覆定位精度 | ±0.02mm | ||
| 主電源※3 | 單相100V | ||
升降旋轉組合
| 軸数 | 2軸 |
|---|---|
| 行程 | 100mm |
| 工作物的最大可搬重量 | 0.8kg(包含機構最大3.0kg) |
| 最高速度※1 | 80mm/s |
| 反覆定位精度 | ±0.02mm |
| 主電源※3 | 單相100V |
- ※1
- 可搬運最大可搬重量的最高速度。
- ※2
- 可安裝於Z軸的最大可搬重量。
- ※3
- 驅動器的驅動用、控制用電源為DC24V。
公司內部設備設計人員分享:自製背景
如何於同一產線中高效處理各種工作物是我們面臨的課題。雖然評估了機器人自動化,卻浮現了下列問題,因此想利用自製來試著解決問題。
- 垂直多關節機器人雖可支援多種工作物,但機器人比預期高價,且啟動的調整似乎相當耗時
- 本次的工作物處理只需能支援事先決定的幾種工作物即可,因此垂直多關節機器人會大材小用
- 為了組入生產線,空間有限,無法使用垂直多關節機器人或SCARA機器人
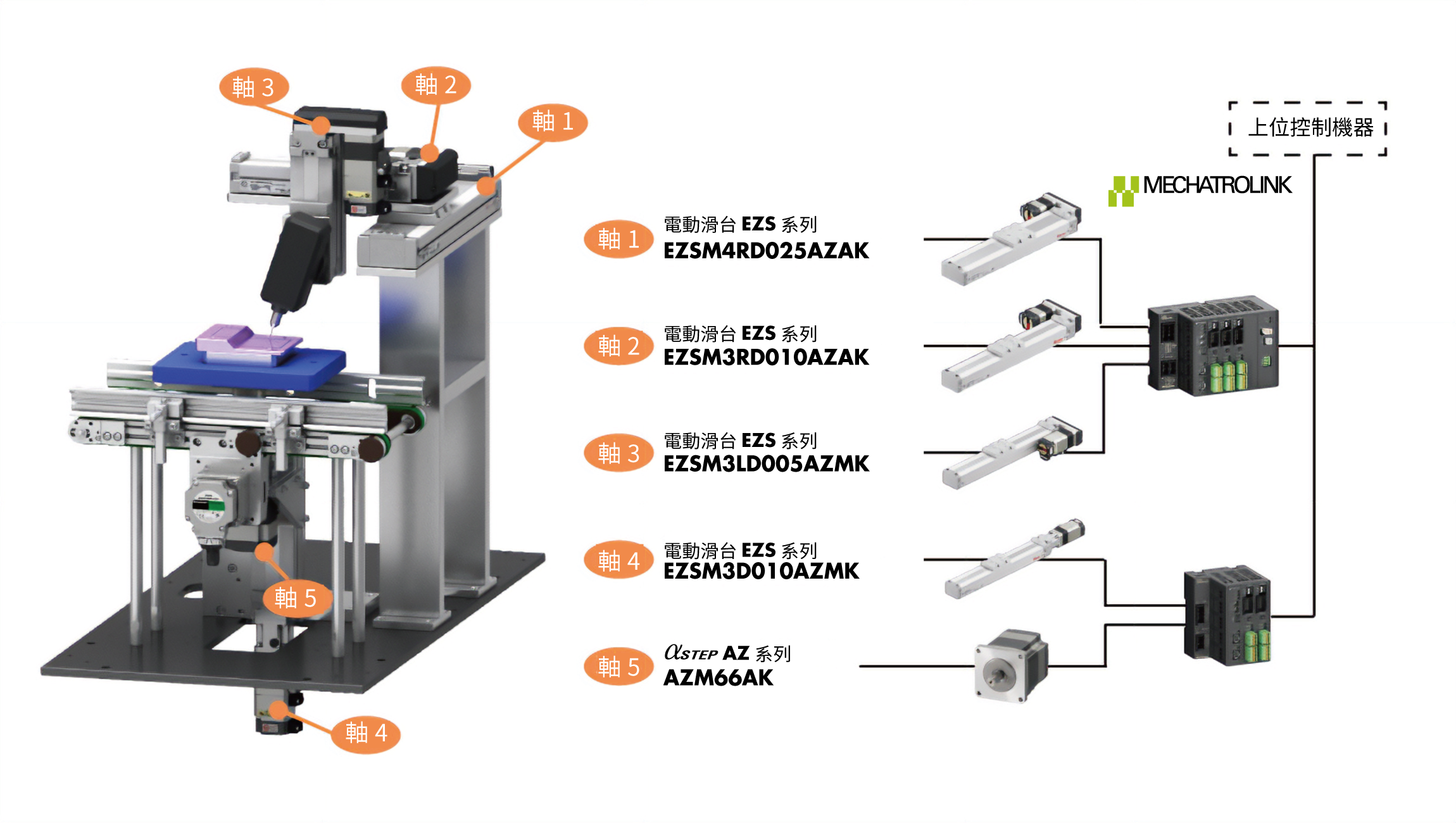
系統構成
各軸透過MECHATROLINK-Ⅲ控制。

構成品一覽表
直交機器人(高架組合)
| 品名 | |||
|---|---|---|---|
|
軸1 |
|
電動滑台 | EZSM4RD025AZAK |
| 連接用電纜線 | CC050VZFA | ||
|
軸2 |
|
電動滑台 | EZSM3RD010AZAK |
| 可動連接用電纜線 | CC050VZRA | ||
|
軸3 |
|
電動滑台 | EZSM3LD005AZMK |
| 可動連接用電纜線 | CC050VZRBA | ||
|
軸1 軸2 軸3 |

|
多軸驅動器 | AZD3A-KM3 |
| 電源電纜線(主電源用) | LC03D06A | ||
| 電源電纜線(控制電源用) | LC02D06A | ||
升降旋轉組合
| 品名 | |||
|---|---|---|---|
|
軸4 |

|
電動滑台 | EZSM3D010AZMK |
| 連接用電纜線套件 | CC050VZFBA | ||
|
軸5 |
|
αSTEP | AZM66AK |
| 可動連接用電纜線 | CC050VZRA | ||
|
軸4 軸5 |

|
多軸驅動器 | AZD2B-KM3 |
| 電源電纜線(主電源用) | LC03D06A | ||
| 電源電纜線(控制電源用) | LC02D06A | ||
- 連接用電纜線的長度皆為5m。


軸1、軸2、軸3
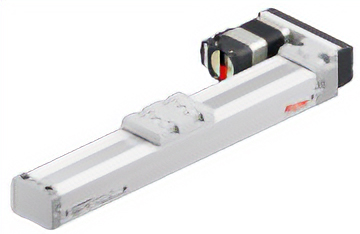
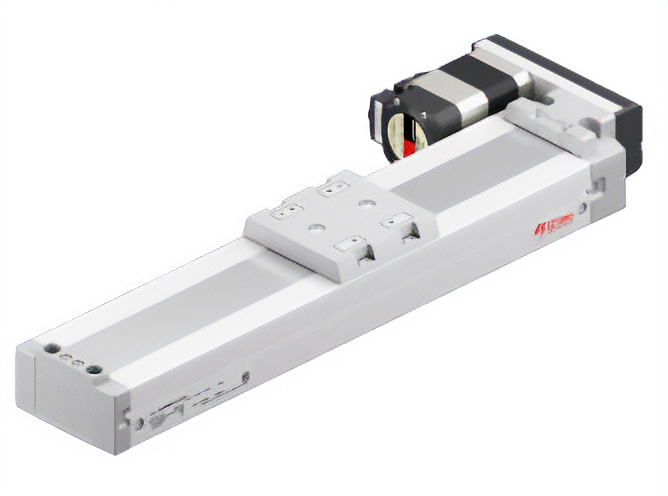
電動滑台EZS系列
軸4
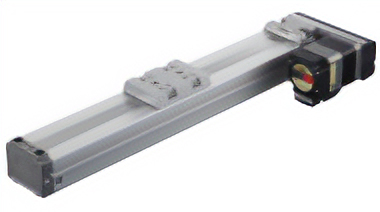
電動滑台EZS系列

軸5
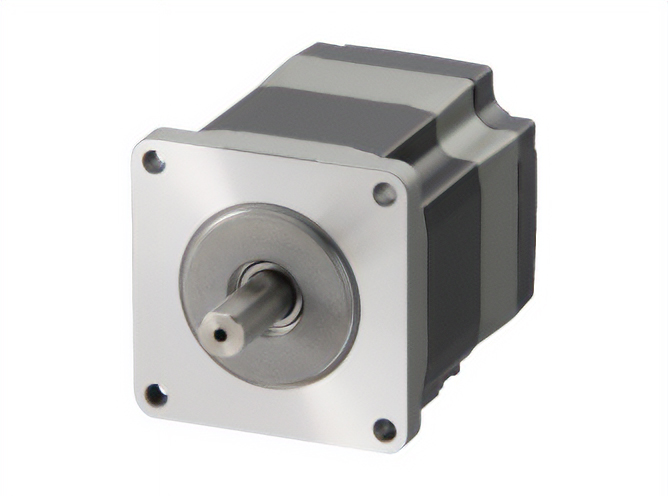
αSTEP AZ系列
軸①②③ 直交機器人(高架組合)
<高容許慣量> 電動滑台 EZS系列
高容許慣量不需輔助導軌,有助於節省設備空間
此設備要組裝至生產線中,因此必須將設備本身縮小。EZS系列的構造可以承受高慣量載重,亦能以單邊固定驅動。藉此可省去使用輔助導軌的門型構造,有助於節省空間。

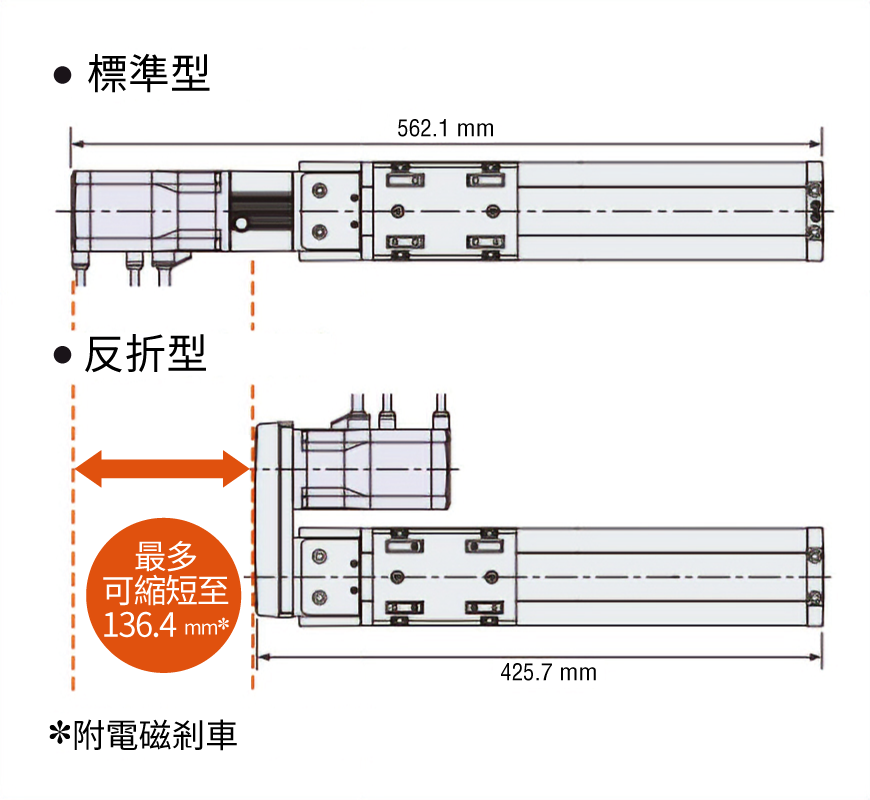
使用反折型規格的馬達,使設備整體更輕巧
透過使用滑台總長較短的反折型,實現設備的輕巧化設計。藉此,便可收納於生產線的設備寬幅限制內。
行程豐富,任意組合
EZS系列從50mm~850mm為止,備有以50mm為單位的行程種類。因此,可按照所需搬運距離和設備的大小組合X軸、Y軸、Z軸。
搭載產品

軸④ 升降軸
搭電動滑台EZS系列
高剛性結構,即使是垂直方向的搬運也可支援多種工作物
此設備要處理各式各樣的工作物,因此必須要支援不同重量的工作物。EZS系列的導軌採用THK製的Ball Retainer LM導軌※1。因此雖為薄型,卻可搬運最大30kg※2。
- ※1
- T為THK股份有限公司的註冊商標。
- ※2
- 為EZS6時。

搭載產品
軸⑤ 旋轉軸
αSTEP AZ系列
無檢知器即可旋轉驅動
此軸會將處理完成的工作物轉向。
αSTEP AZ系列於馬達後部搭載無需電池的機械式絕對式編碼器<ABZO編碼器>。
不受原點復歸所需時間和外部檢知器產生的問題影響。
旋轉軸的應用範例
為方便處理,可依工作物的尺寸和形狀於旋轉部調整工作物位置。αSTEP AZ系列藉由「捷徑運轉」功能,可朝指定座標進行180°以內的移動,縮短工作物調整時間。
搭載產品
αSTEP 搭載絕對式編碼器(無需電池)
AZ系列
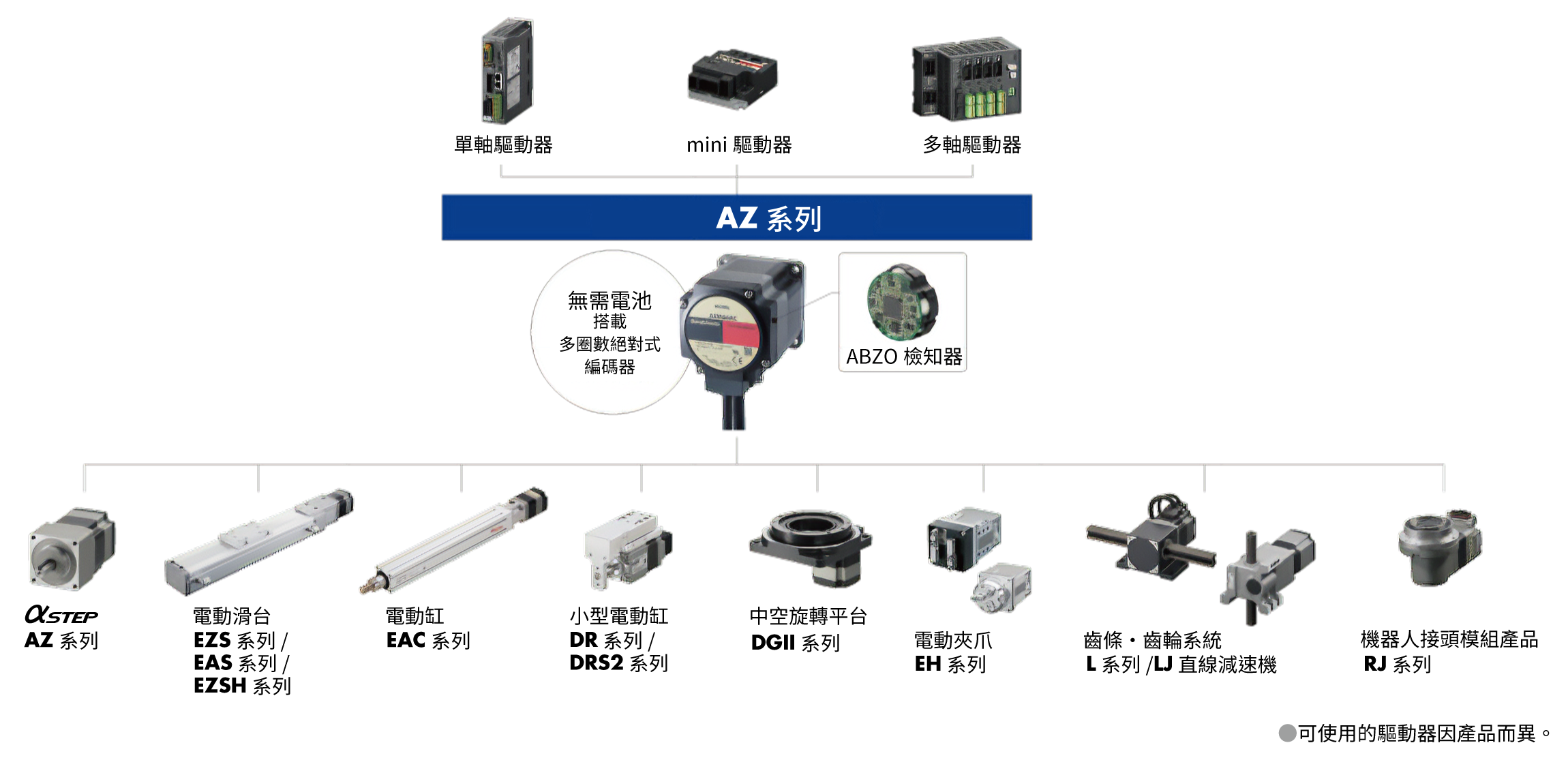
αSTEP採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。不需要電池即可實現絕對式系統定位。以實惠價格實現了先進的定位。
相關產品

全軸共通
αSTEP AZ系列 多軸驅動器
透過直線補間、圓弧補間支援各種形狀
對應MECHATROLINK-III的多軸驅動器透過上位控制器支援直線補間、圓弧補間運轉。可處理各種尺寸和形狀的工作物。多軸驅動器除了MECHATROLINK-III,亦備有EtherCAT、SSCNETIII/H對應類型。
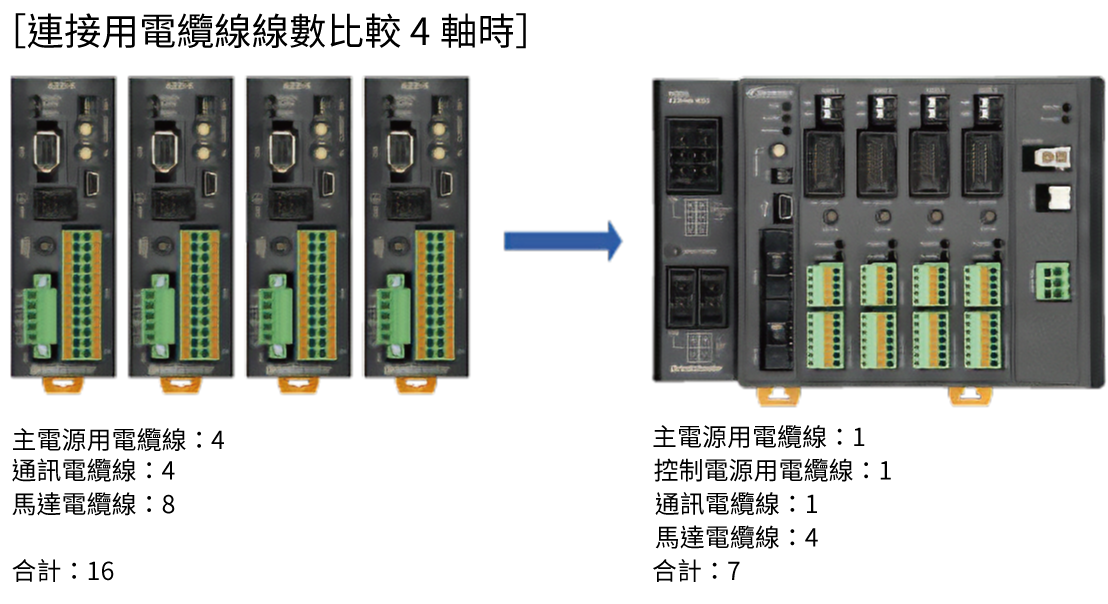
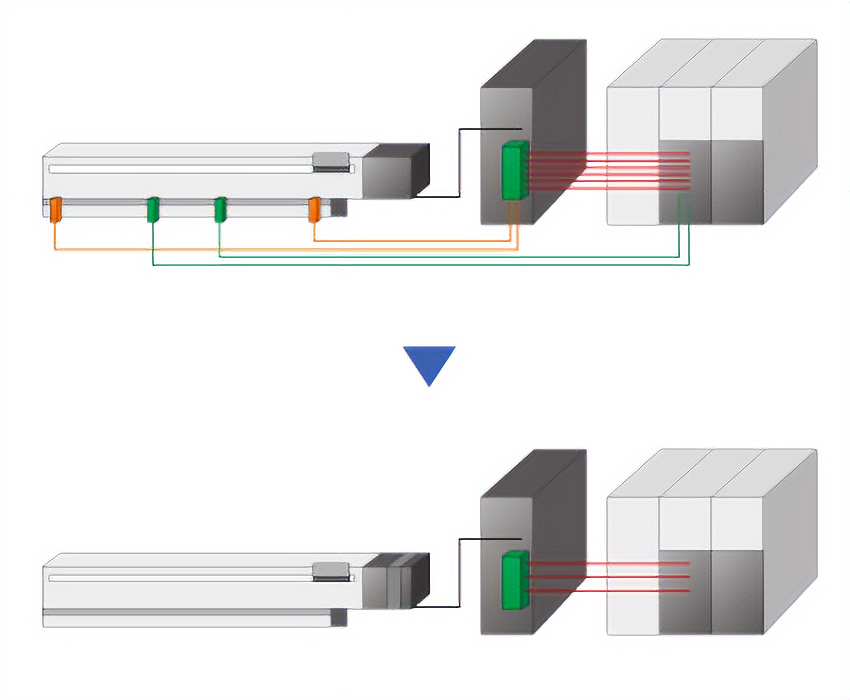
最多可連接4軸,有助於節省電控箱內的配線
多軸驅動器可連接2~4軸的馬達。由於可彙整於一台驅動器,可節省與上位機器的連接用電纜線或電源電纜線等配線。
αSTEP AZ系列
縮短多軸時的原點復歸時間
馬達後部搭載無需電池的機械式絕對式編碼器<ABZO編碼器>。即使電源切斷仍可保持位置資訊,不需原點復歸。即使軸數多,亦可縮短原點復歸的時間。
此外,即使是需要原點復歸的情形,因為未使用外部檢知器而能高速進行原點復歸。

不需要外部檢知器,有效減少問題
A搭載於AZ系列的機械式絕對式編碼器<ABZO(絕對式)編碼器>器。此設備共驅動5軸,實現了5個軸的檢知器刪減。
藉此不僅減少零件成本或配線時間,也能減少因檢知器斷線或檢知錯誤等而產生的問題,有助於降低整體成本。
透過統一的控制系統實現各種動作
αSTEP AZ系列除了從小型至標準型的馬達之外,亦備有附電磁剎車、附減速機等的產品種類。此外,也提供組裝了馬達和模組產品的機構產品。由於各馬達、驅動器、電纜線等皆可共用,可統一配線、控制、維修備品,縮短設備啟動時間與精力。
搭載產品

αSTEP AZ系列
多軸驅動器
可連接本公司AZ系列DC電源輸入的馬達,以及搭載上述馬達的電動模組產品之多軸驅動器。分別提供對應SSCNETIII/H、MECHATROLINK-III、EtherCAT驅動檔的產品。
αSTEP 搭載絕對式編碼器(無需電池) AZ系列
αSTEP採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。不需要電池即可實現絕對式系統定位。以實惠價格實現了先進的定位。
從產品選用階段開始支援設備設計
支援馬達選用
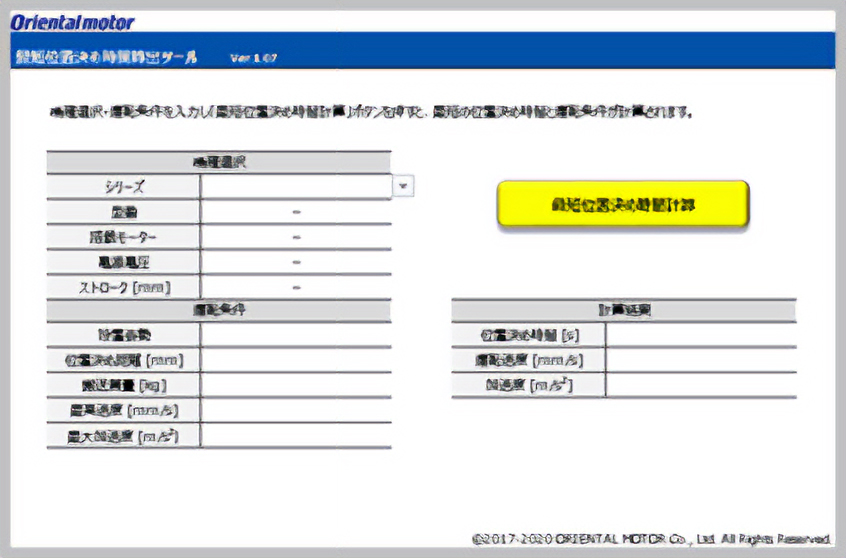
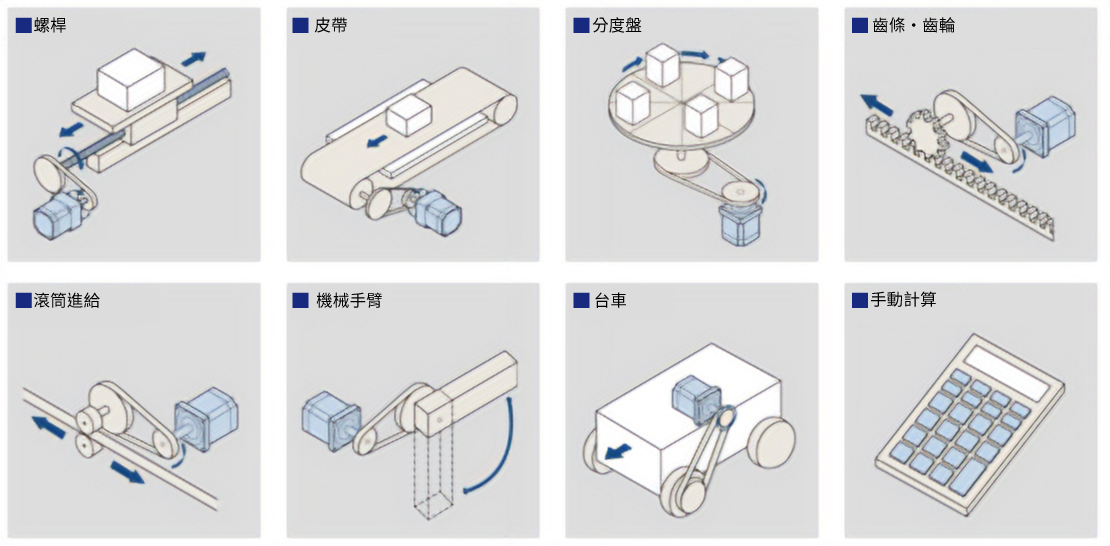
本公司提供可透過電腦選用馬達、電動滑台及電動缸的方法,「電動滑台選用軟體」只要輸入軸數和運轉條件的數值,即可選擇符合客戶使用方式的產品。
關於其他機構,請使用「馬達選用工具」。
此外,亦可交由專責工作人員協助客戶選用馬達。詳情請參閱連結。
-
< 馬達選用工具 >
-
備有設備相關資料
備有設備規格、外形尺寸及動作模式相關資料,歡迎於檢討採用同類設備時多加利用。
-
備有範例CAD資料
可於本公司網站下載使用於電動模組產品安裝之周邊安裝板的範例CAD資料。敬請於設備設計和產品評估時多加參考。
-
備有計算最短定位時間的工具
可根據「機種」、「運轉條件」計算出定位時間以供參考。請當作產品選用時的支援工具多加應用。