設備自製事例 工作物搬運設備
以本公司生產設備的實例說明工作物搬運設備及產品選用的要點。
另外也一併介紹為支援設備設計所提供的服務。歡迎於檢討採用時多加洽詢。
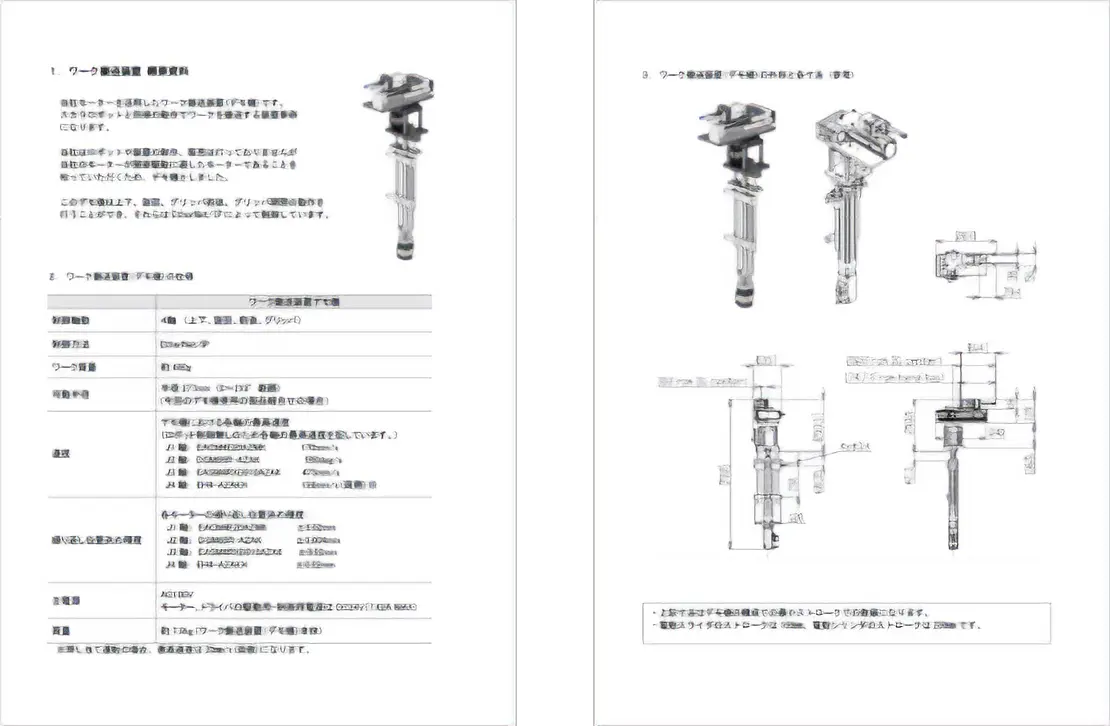
設備實例 工作物搬運設備
設備概要
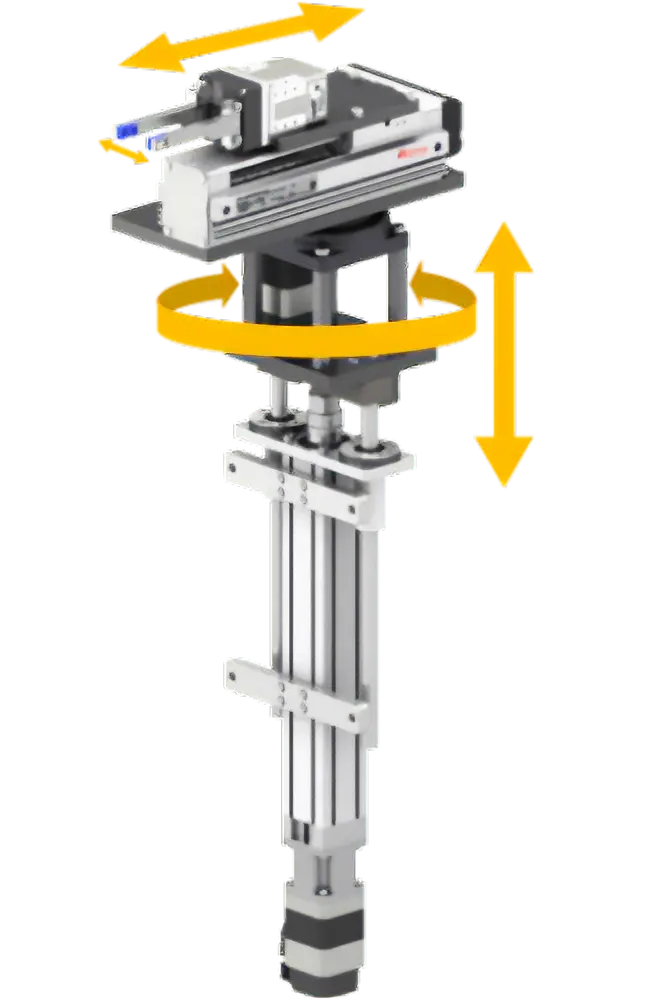
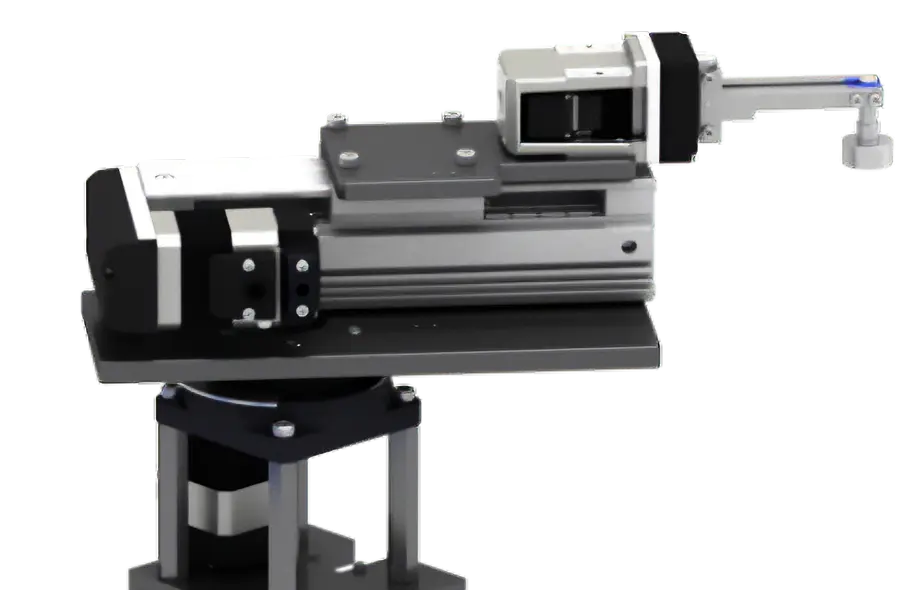
此設備能執行類似SCARA機器人的動作來搬運工作物。
可夾持、旋轉工作物,並移動至與拾取地點高度不同的位置。
| 軸数 | 4軸 |
|---|---|
| 設置方法 | 壁掛 |
| 機械手臂長度 | 277mm |
| 水平行程 | 80mm |
| 垂直行程 | 160mm |
| 工作物重量 | 400g |
| 主電源 | AC100V* |
| 重量 | 11kg |
- ※ 驅動器的驅動用、控制用電源為DC24V。
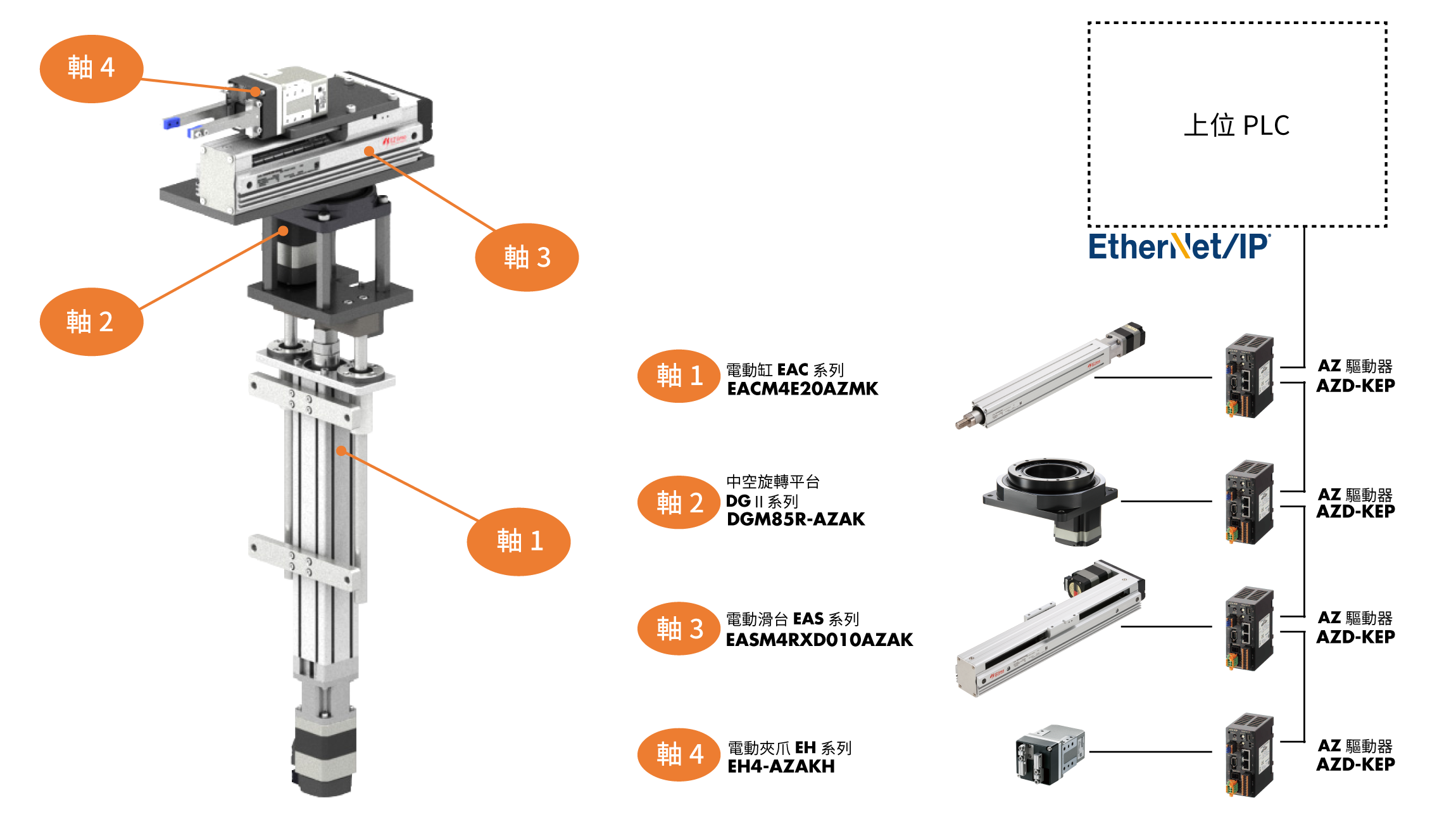

構成品一覽表
馬達、電動模組產品
| 品名 | ||
|---|---|---|
| 軸1 | 電動缸 | EACM4E20AZMK |
|
|
EtherNet/IP對應驅動器 | AZD-KEP |
| 可動連接用電纜線 | CC050VZRB2 | |
| DC電源用電纜線 | CC02D010-3 | |
| 軸2 | 中空旋轉平台 | DGM85R-AZAK |
|
|
Ethernet/IP對應驅動器 | AZD-KEP |
| 可動連接用電纜線 | CC050VZR2 | |
| DC電源用電纜線 | CC02D010-3 | |
| 軸3 | 電動滑台 | EASM4RXD010AZAK |
|
|
EtherNet/IP對應驅動器 | AZD-KEP |
| 可動連接用電纜線 | CC050VZR2 | |
| DC電源用電纜線 | CC02D010-3 | |
| 軸4 | 電動夾爪 | EH4-AZAKH |
|
|
EtherNet/IP對應驅動器 | AZD-KEP |
| 可動連接用電纜線 | CC050VZ2R2 | |
| DC電源用電纜線 | CC02D010-3 | |


- EtherNet/IP™為ODVA的商標。
- 可動連接用電纜線的長度皆為5m。
- DC電源用電纜線的長度皆為3m。
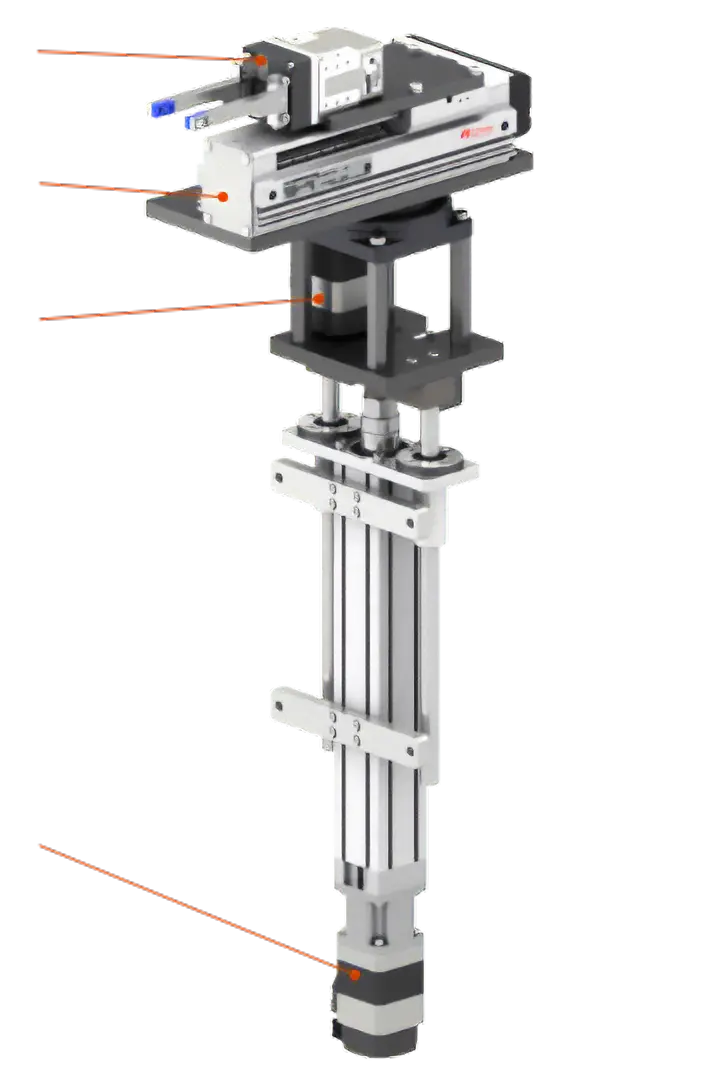

軸1
電動缸EAC系列

軸2
中空旋轉平台 DGII系列

軸3
電動滑台EAS系列

軸4
電動夾爪EH系列 搭載αSTEP AZ系列

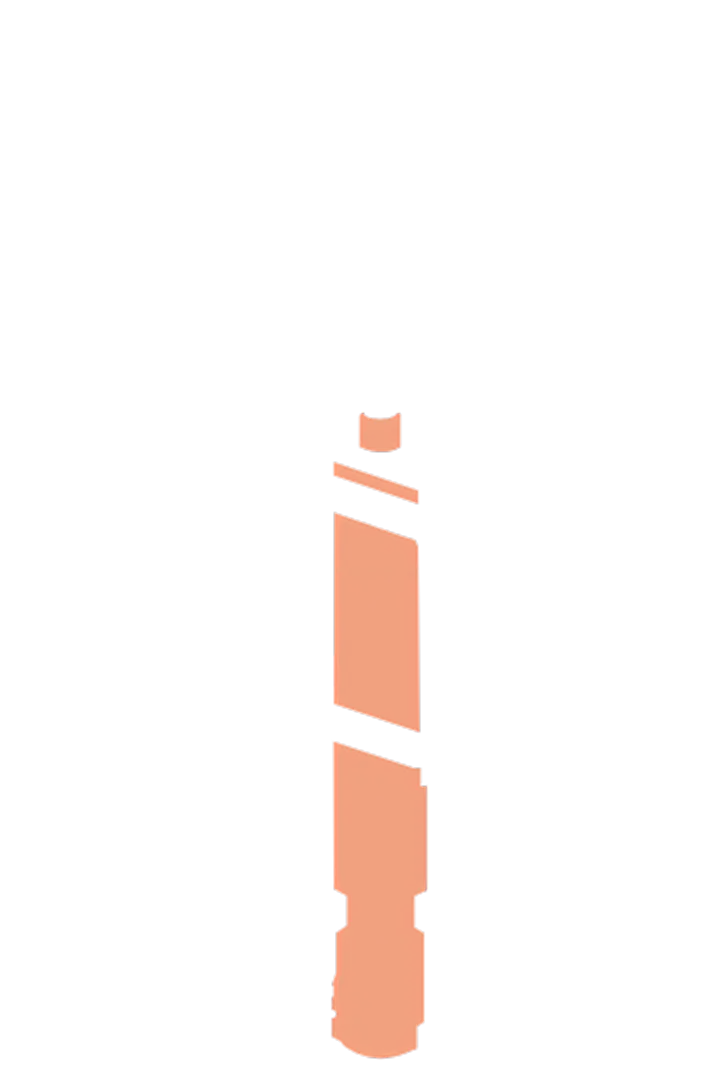
軸① - 升降軸
<小型、高推力>電動缸EAC系列
最大垂直可搬重量30kg
採用活塞桿部由鋁材製成的小型、輕量卻具備高推力的電動缸。此設備升降的機構部總重量達7.7㎏,進行旋轉、水平移動及夾持工作物的動作。

搭載機器

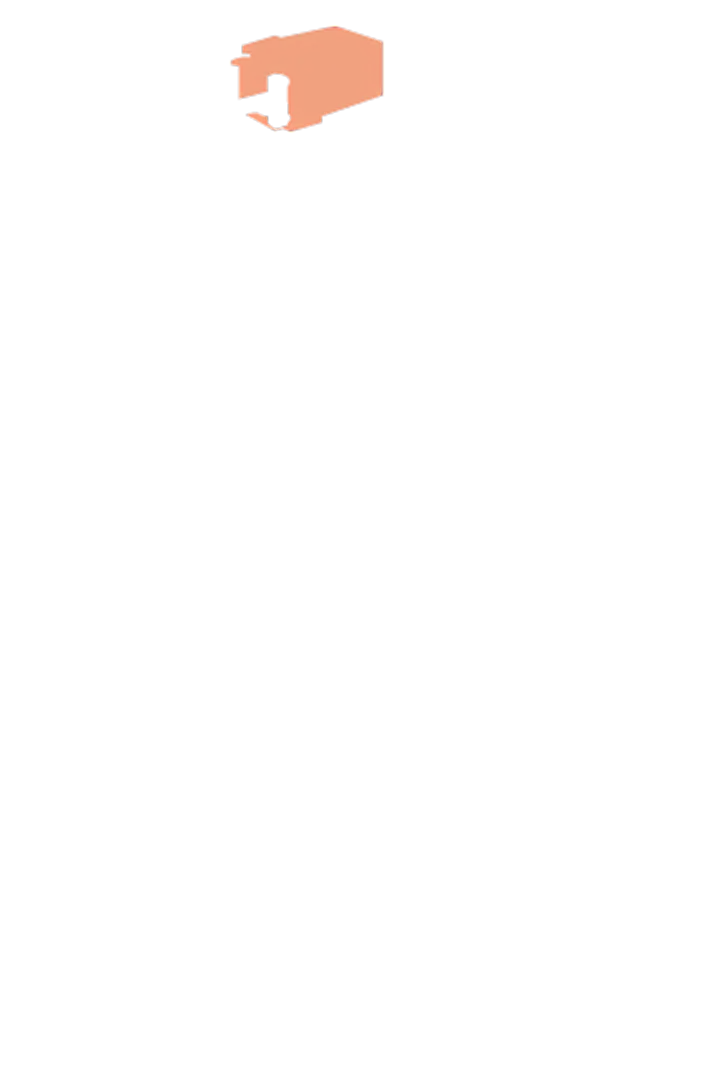
軸② - 旋回軸
<高載重、高剛性>中空旋轉平台 DGII系列
為承受機械手臂各種姿勢而增加的負載慣量,採用高載重、高剛性的平台
此設備的負載慣量在末端效應器拾取工作物時會增加。
DGII系列中空輸出平台採用Cross Roller軸承,實現了高容許慣量。
因此,即使在遠離軸②中心的位置抓住工作物亦可驅動。
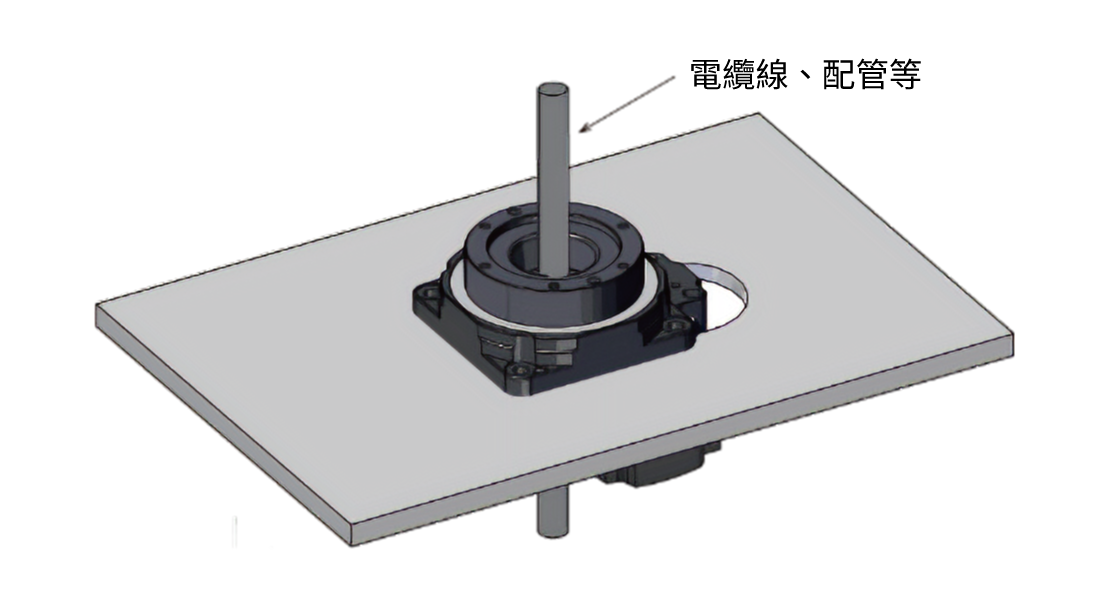
簡化動力電纜線的配線
DGII系列的大口徑中空孔(貫穿)可使配線及配管從中穿過。
此設備透過讓構成機械手臂的滑台、電動夾爪的動力電纜線從中空孔穿過,以避免複雜的配線。
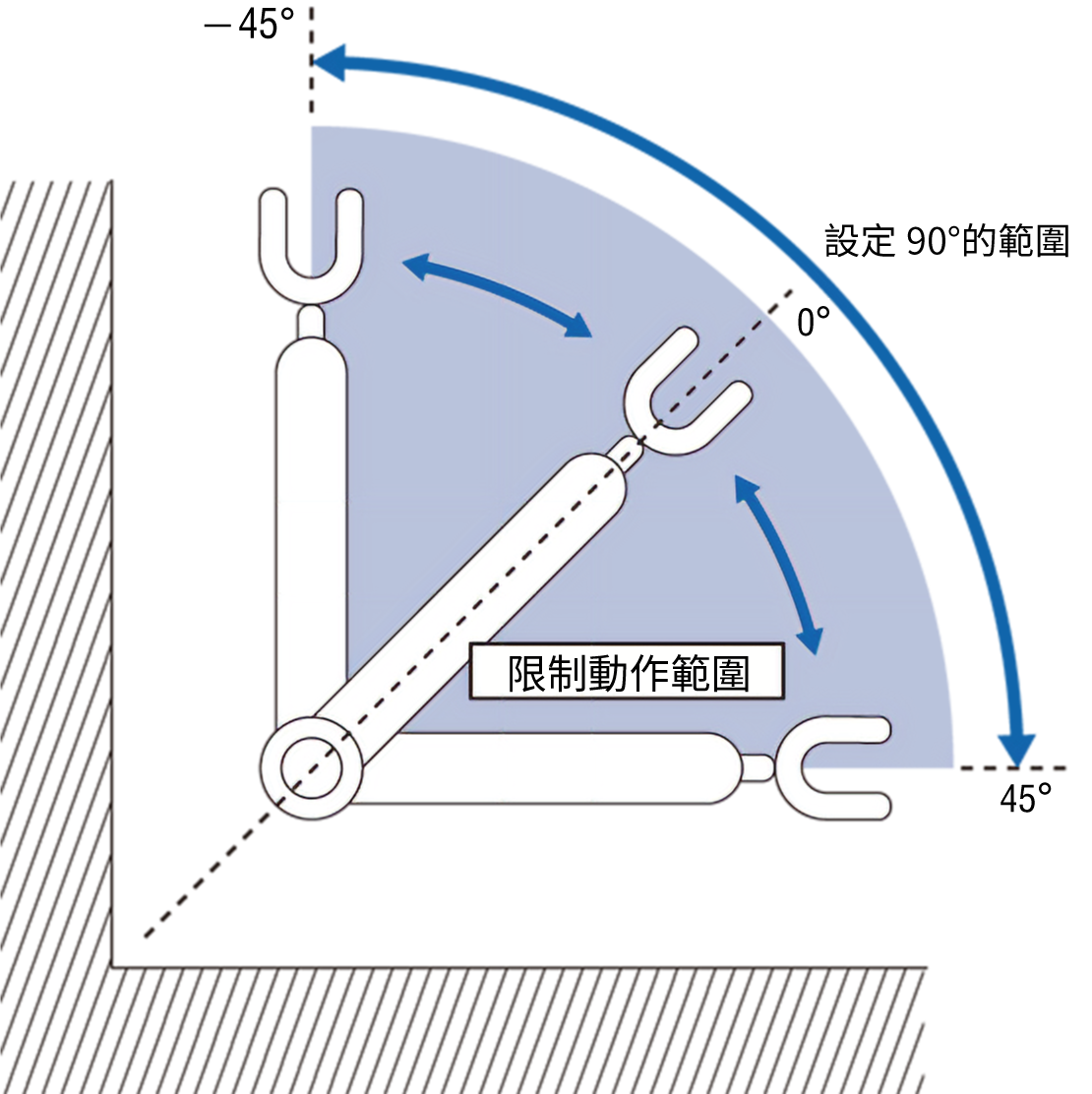
設定禁止進入範圍,避免與周邊設備接觸
當設備可動範圍內有其他設備、障礙物時,可限制輸出平台的動作範圍。藉此避免與周邊設備接觸。
搭載機器

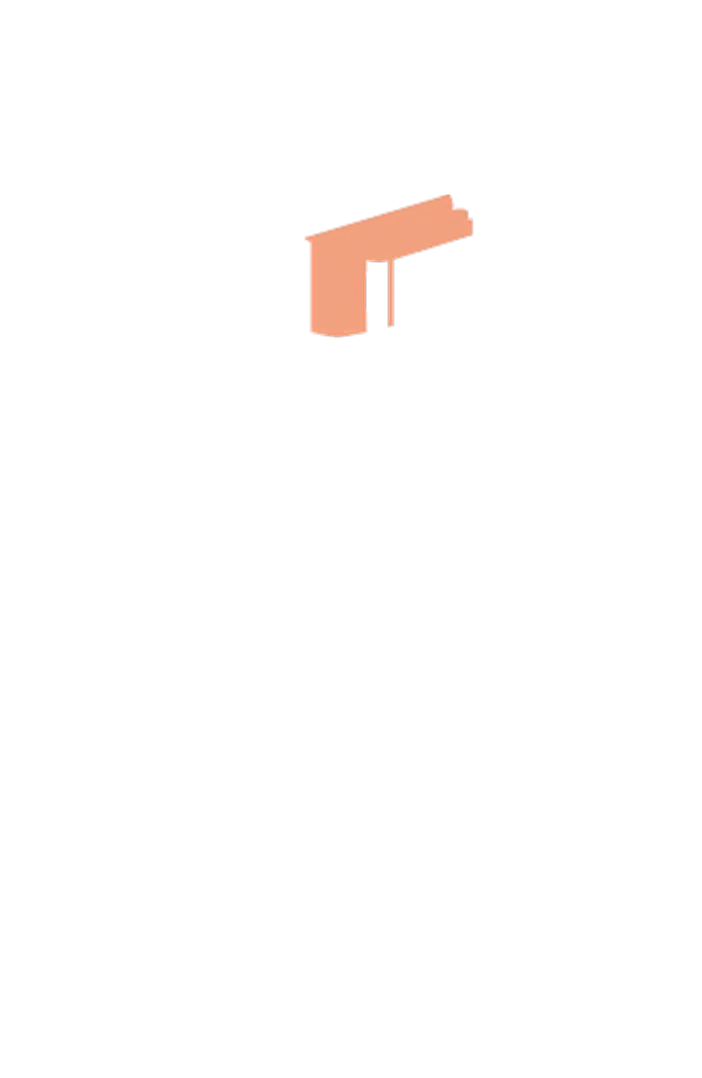
軸③ - 水平軸
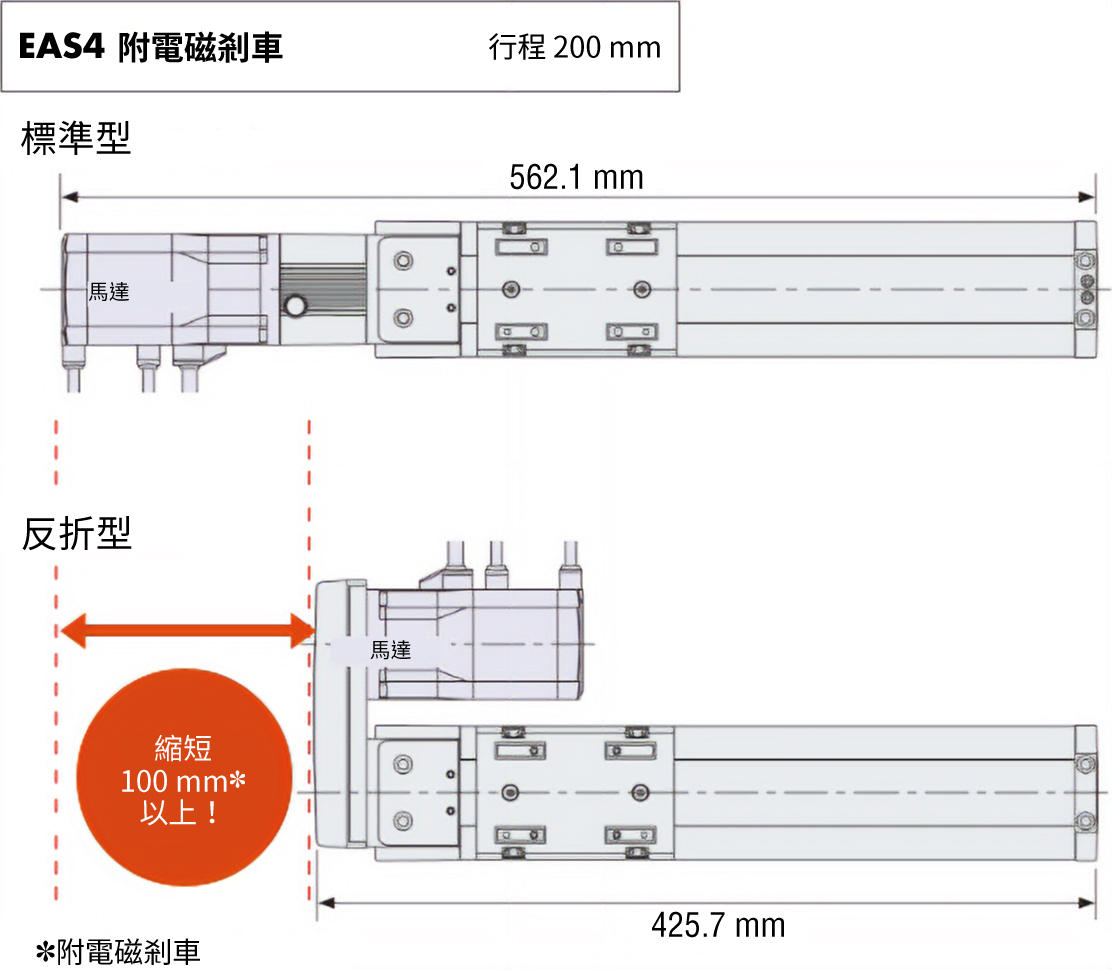
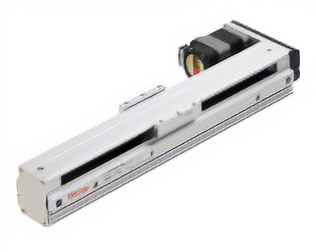
<高載重、高剛性>電動滑台EAS系列
藉由反折規格減少旋轉半徑
藉由使用反折機構的滑台,能減少機構的運轉半徑,有助於節省空間。
採用高精度、高剛性的滑台,確實搬運工作物
採用轉造滾珠螺桿,實現反覆定位精度達±0.02mm。
導軌採用THK製LM導軌。即使如同設備範例一般讓機械手突出平台外,仍可將滑台的彎曲度控制在最低限度。
此外,由於將高精度的LM導軌直接安裝在客戶的機框基座,適合重視運轉平行度的用途(運轉平行度0.03mm)。
搭載機器
軸④ - 末端效應器
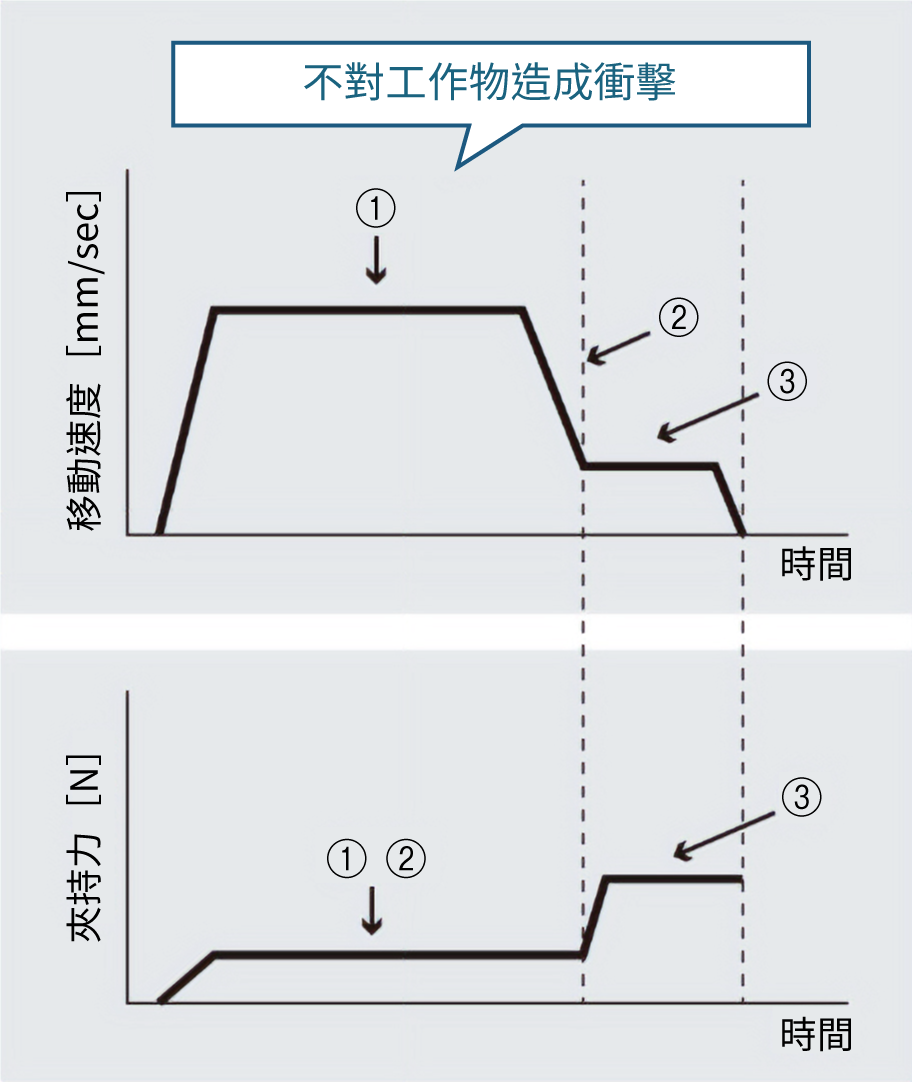
<小型、輕量>電動夾爪EH系列
一台即可夾持各種工作物
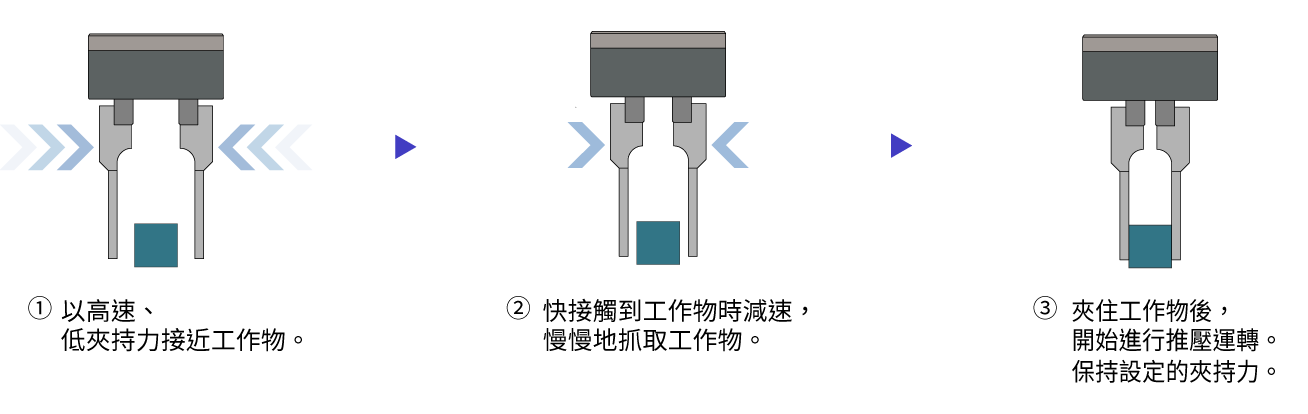
EH系列可自由設定夾持力,因此可對應各式各樣的工作物。
(行程25㎜)
![夾持力及運轉電流[参考値]](/sites/default/files/image/solutions/casestudies/in-house-machine/01/in-house-machine-01_27_tw.webp)
最大夾持力 25N
[ 夾持力範圍(参考値)約6N~25N ]
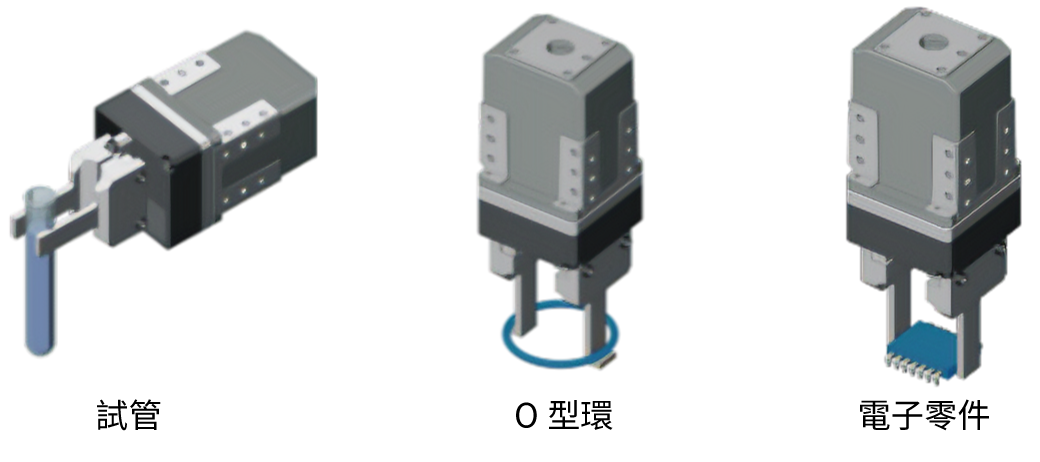
1台即可夾持各種工作物
搭載機器

電動夾爪EH系列 αSTEP 搭載αSTEP AZ系列
將齒條、齒輪機構與αSTEP AZ系列組合的電動夾爪。實現如人類手指般細緻的「抓取」動作,幫助自動化及節省人力。
各軸共通
αSTEP AZ系列
以機械式絕對式編碼器保持位置資訊
AZ系列搭載無需電池的機械式絕對式編碼器<ABZO編碼器>。定位運轉中即使電源緊急停止或因停電而被阻隔,仍可保持位置資訊。

備有豐富的產品種類
備有各種安裝尺寸、轉矩特性及附電磁剎車等豐富的產品種類。
可配合各軸選用最適合的馬達。
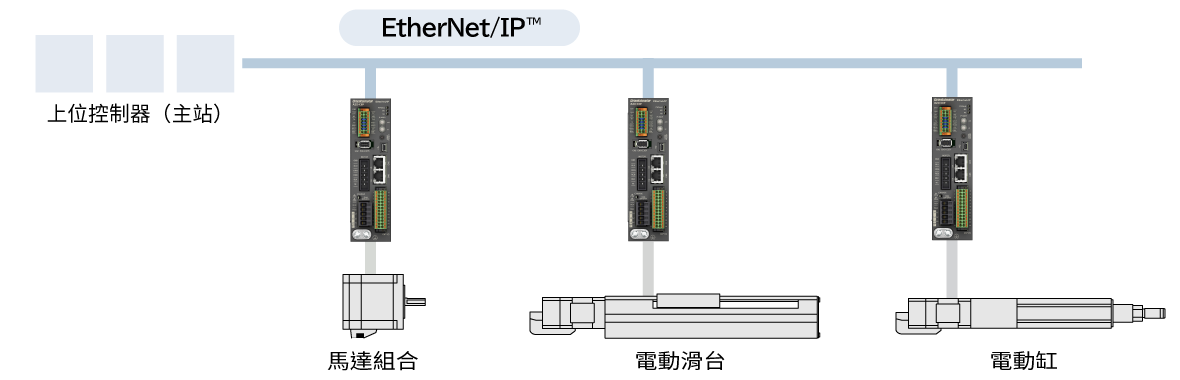
αSTEP AZ系列 EtherNet/IP™對應驅動器
從網路控制馬達
可從網路直接控制。
使用1條EtherNet/IP通訊電纜線連接上位控制機器與EtherNet/IP對應驅動器,節省配線。
另亦備有對應各種FA網路的產品。
- EtherNet/IP™為ODVA的商標。
備有EDS檔案
備有EDS檔案,讓EtherNet/IP對應產品可更簡單使用。EDS檔案可由各驅動器的詳細頁面下載。
搭載機器

αSTEP搭載 絕對式編碼器(無需電池) AZ系列
αSTEP採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。不需要電池即可實現絕對式系統定位。以實惠價格實現了先進的定位。