步進馬達
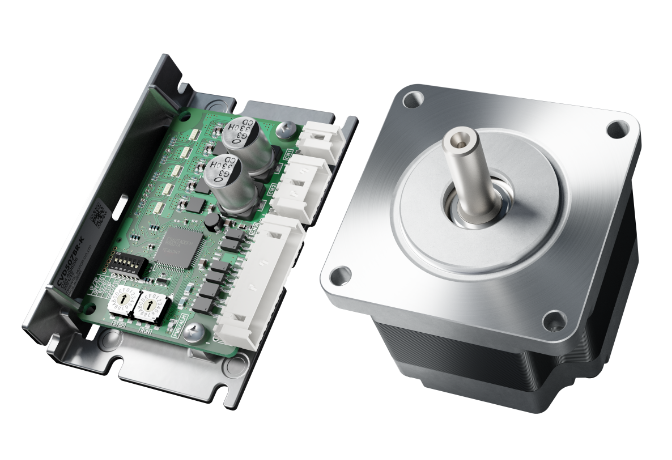
與脈波信號準確同步,可進行高精度的位置控制。 高轉矩・低振動,適合短距離的短時間定位用途。
步進馬達
概要、相關資訊
概述
步進馬達輕鬆實現精確定定位運轉。
這些馬達用於各種類型的設備,使用脈波信號進行精確的旋轉角度和轉速控制。
仔細精確的定位
步進馬達是一種以固定角度旋轉的馬達,就像時鐘的秒針一樣。這個角度稱為「基本步級角」。東方馬達提供基本步級角為0.72°的5相步進馬達和基本步級角為1.8°的2相步進馬達。

用脈波信號輕鬆控制
高精度定位的系統配置如下圖所示。利用控制器的脈波信號可以精確控制步進馬達的旋轉角度和轉速。
系統構成

什麼是脈波信號?
脈波信號是反覆ON/OFF電源的電信號。
ON/OFF1個週期計為1個脈波;輸入1個脈波時,馬達出力軸旋轉1個步級角。

旋轉角度與脈波數成正比
步進馬達的旋轉角度與輸入驅動器的脈波信號數(脈波數)成正比。
步進馬達旋轉角度與脈波數的關係表示如下:
θ = θS × A
- θ
- 馬達出力軸旋轉角度[°]
- θS
- 步級角(解析度)[°/step]*
- A
- 脈波數

轉速與脈波速度成正比
步進馬達的轉速與輸入驅動器的脈波信號(脈波頻率)的速度成正比。
脈波速度[Hz]與轉速[r/min]的關係表示如下:
N = θS / 360 × f × 60
- N
- 馬達出力軸的轉速[r/min]
- θS
- 步級角(解析度)[°/step]*
- f
- 脈波速度[Hz]
(每秒脈波列輸入數)
- *對於減速機型馬達,這是減速機出力軸的步級角(解析度)。

小巧且高轉矩
步進馬達結構緊湊,可產生高轉矩。
這些特徵提供了出色的加速度特性和應對能力,這使得這些馬達對於必須頻繁啟動和停止馬達的應用非常有用。
此外,透過使用減速機型馬達,可以獲得更大的轉矩。
可以頻繁啟動和停止

轉速-轉矩特性(馬達安裝尺寸為60 mm時)

馬達保持在停止位置
步進馬達即使停止也有保持力,因此不需要依靠機械煞車來保持停止位置。

可驅動大慣性負載
步進馬達比同等安裝尺寸的伺服馬達可以驅動更大的慣性負載。
以轉子慣性慣量的30倍進行比較
-
步進馬達
慣性慣量22.4 x 10-4 kg·m2
(30倍轉子慣性慣量)- 負載慣性慣量
- 直徑169毫米,厚度10毫米,材質鋁
- 馬達
- 安裝尺寸60 mm
長度90 mm
-
既有伺服馬達
慣性慣量4.0 x 10-4 kg·m2
(30倍轉子慣性慣量)- 負載慣性慣量
- 直徑110 mm,厚度10 mm,鋁材質
- 馬達
- 安裝尺寸60 mm
長度96.5 mm
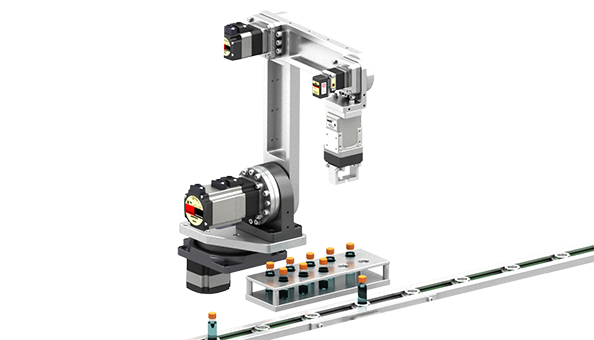
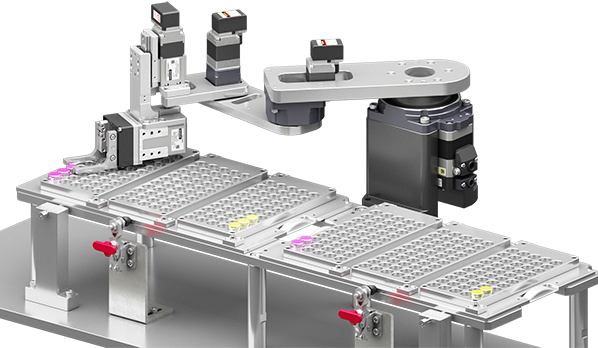
用途例
用於XY軸的工作台驅動器

定量注入機的加料

儲料器的垂直操作

定量塗層

馬達的種類
步進馬達有多種不同類型;包括標準型、附電磁剎車型和各種減速機型。您可以選擇適合您應用所需的功能和效能的類型。下面介紹典型例子。
標準型
這是一款易於使用的基本品名。
馬達有多種尺寸可供選擇。

高轉矩型
透過在轉子和定子的小齒之間插入永久磁鐵來實現高轉矩和高回應。與同尺寸的標準型相比,轉矩顯著增加。

高解析度型
此馬達的基本解析度是標準型的兩倍。
這樣可以提高定位精度並減少振動。

編碼器類型
可監視現在位置或檢知位置差距等。
例如,比較現在位置與指令位置,藉此確認馬達的正常動作。

附電磁剎車型
本產品採用無激磁作動型電磁剎車。
當發生停電或其他意外事件時,電磁剎車將負載保持在適當的位置,以防止其掉落。
- 一旦斷電,馬達失去自我保持力,在垂直操作或施加外力時,馬達將無法保持在停止位置。在升降設備和類似應用中,使用附電磁剎車型。

減速機型
這些馬達採用了減少齒隙的專用位置控制減速機,以充分利用馬達的高可控性。
即使在承受大負載轉矩的應用中,減速機也能確保高精度、平穩運作。

減速機型馬達的優點
東方馬達提供已預先裝有減速機的減速機型馬達,作為步進馬達的變體。使用減速機型馬達帶來許多優點:例如減速、高轉矩和高解析度,以及以下列出的優點。
馬達可驅動大慣性負載
當使用減速機型馬達時,與同類標準馬達相比,可轉動的慣性負載與減速比的平方成比例地增加。這意味著可以用減速機型馬達驅動更大的慣性負載。
|
|
|
| 馬達種類 | 減速機型(減速比) | 標準型 |
|---|---|---|
| 品名 | AZM66AC-PS5 | AZM66AC |
| 容許負載慣性慣量 (30倍轉子慣性慣量) |
277.5 × 10-4 kg·m2 | 11.1 × 10-4 kg·m2 |
| 慣性負載直徑 (厚度20 mm、鋁材質) |
317 mm | 142 mm |
| 速度範圍 | 0~600 r/min | 0~6000 r/min |
可以改善啟動和停止時的阻尼特性
如果慣性負載較大或加減速時間較短,減速機型馬達可以比標準馬達更有效地降低阻尼,從而確保運轉更穩定。減速機型馬達非常適合需要快速定位大慣性慣量(如分度台或臂驅動器)的應用。

可小型化
與產生同等激磁最大靜止轉矩的標準馬達相比,減速機型馬達的安裝尺寸較小,因此其重量和體積可以減少。當設備必須緊湊且輕量化時,減速機型馬達非常有效。

高剛性、耐扭轉
減速機型馬達具有高剛性,因此比標準馬達更耐扭轉,並且受負載轉矩波動的影響較小。這意味著即使負載大小發生變化,也能確保穩定性和高精度定位。
-
用途例:升降機
即使在負載數量或重量變化的情況下,像電梯這樣垂直運作的機構也可以實現高精度停止。
-
用途例:監視器
即使被強風晃動,相機也能保持穩定的位置。
可直接安裝負載(諧和式減速機型、HPG減速機型)
諧和式減速機型(安裝尺寸90 mm除外)和HPG減速機型可將負載直接安裝在與軸一體的旋轉表面上。
外觀及安裝範例

用途例:分度盤
這不僅減少了零件數量和工序,還提高了可靠性。它們也適用於有力矩負載的操作。

減速機型馬達的種類與特徵
步進馬達有各種減速機型馬達可利用。
您可以根據轉矩、精準度(齒隙)等選擇最佳類型。
點選右圖可查看各型號的特色及主要規格。
- 請參閱此處以了解每種類型之間的差異。
- 每個系列適用的減速機型馬達不同。

| 減速機類型 | 平行軸 | 直交軸 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SH (平齒輪機構) |
CS (平齒輪機構) |
TH (平齒輪機構) |
TS (平齒輪機構) |
PS (行星式齒輪機構) |
PN (行星式齒輪機構) |
HPG (諧和式行星® |
諧和式 (諧和式減速機 ® |
FC (面齒輪機構) |
|||
| 外觀圖 |
|

|

|

|

|

|

|

|

|

|
|
| 特徵 | |||||||||||
| 精度 | 2相用 | 低齒隙 | 無齒隙 | 低齒隙 | |||||||
| ★ | ★ | ★★ | ★★ | ★★ | ★★★ | ★★★ | ★★★ | ★★ | |||
| 高轉矩 | ★ | ★★ | ★ | ★★ | ★★ | ★★ | ★★ | ★★ | ★★ | ||
| 瞬間最大轉矩可用 | - | - | - | ○ | ○ | ○ | ○ | ○ | - | ||
| 負載面安裝 | - | - | - | - | - | - | - | ○ | ○ | - | |
| 中心軸 | - | ○ | - | - | ○ | ○ | ○ | - | ○ | ○ | |
| 主要規格 | |||||||||||
| 減速比類型 | 3.6、7.2、9、10、18、36 | 5、10、15、20 | 3.6、7.2、10、20、30 | 3.6、7.2、10、20、30 | 5、7.2、10、25、36、50 | 5、7.2、10、25、36、50 | 5、15 | 50、100 | 7.2、10、20、30 | ||
| 速度範圍[r/min] | ~833 | ~600 | ~500 | ~833 | ~600 | ~600 | ~900 | ~70 | ~416 | ||
| 容許轉矩[N·m] | ~4 | ~4.5 | ~4 | ~6 | ~8 | ~8 | ~9 | ~10 | ~10.5 | ||
| 瞬間最大轉矩[N·m] | - | - | - | ~10 | ~20 | ~20 | ~19 | ~36 | - | ||
| 齒隙[arcmin] | 45~70 | 45~70 | 10~35 | 10~35 | 7~9 | 2~3 | 3 | 0 | 10~15 | ||
| 減速機類型 | SH | CS | TH | TS | PS | PN | HPG | 諧和式 | FC | ||
- *請參閱上面的值以了解每種類型之間的差異。依安裝尺寸和減速比的不同而變化。
- *主要規格中的數值是基於安裝尺寸60 mm。
- *諧和式行星®、諧和式減速機®為Harmonic Drive Systems Inc.的註冊商標或商標。

-
各類型的原理與結構請參閱技術參考。
步進馬達用減速機和伺服馬達
驅動器種類
內藏定位功能型
可將運轉資料設定在驅動器中,並從主機系統中選擇並執行。主機系統連線與控制執行下列任一操作:I/O、Modbus(RTU)/RS-485通訊或FA網路。透過使用網路轉換器(另售),可進行CC-link、MECHATROLINK或EtherCAT通訊。
-
- 所謂FLEX係指對應I/O控制、Modbus(RTU)控制、及經由網路轉換器的FA網路控制之產品總稱。


RS-485通訊附脈波列輸入型(僅限AZ系列)
配合輸入驅動器的脈波信號,執行運轉。可利用定位模組(脈波產生器)進行馬達控制。可使用RS-485通訊監視馬達的狀態資訊(位置、轉速、轉矩、Alarm、溫度等等)。



脈波列輸入型
配合輸入驅動器的脈波信號,執行運轉。馬達控制由客戶提供的定位模組(脈波產生器)執行。使用支援軟體(MEXE02),即可確認Alarm履歷或監視各種狀態。


對應網路的驅動器(僅限AZ系列)
此驅動器支援EtherNet/IP和EtherCAT通訊。可從網路直接控制。可使用1條通訊電纜線連接上位控制器與驅動器,節省配線。

多軸驅動器(AZ系列、限DC電源輸入)
此多軸驅動器與SSCNETIII/H、MECHATROLINK-III、EtherCAT相容。
此驅動器可連接本公司的AZ系列DC電源輸入的馬達及搭載這類馬達的電動模組產品。
提供具有2軸、3軸和4軸連接功能的驅動器。

- *EtherCAT©®為德國Beckhoff Automation GmbH許可的註冊商標和專利技術。
- *EtherNet/IP™為ODVA的註冊商標。
- *MECHATROLINK-Ⅲ為MECHATROLINK協會的註冊商標。
- *SSCNETⅢ/H為三菱電機股份有限公司的註冊商標或商標。
- *CC-Link為CC-Link協會的註冊商標。
- *Modbus(RTU)為Schneider Automation Inc.的註冊商標。
- 請點選此處下載支援軟體MEXE02
相關訊息
給還不確定要哪種系列的您