選用與控制AGV、AMR使用馬達時所需的「車輪資訊」有哪些?
本篇將會介紹選用與控制AGV、AMR使用馬達時所需的「車輪資訊」有哪些。
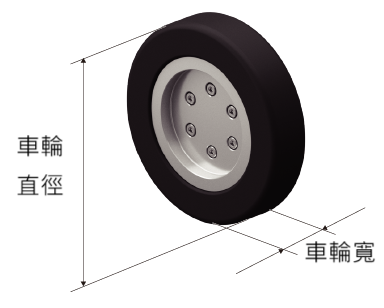
選用馬達與車輪寬度
選用條件
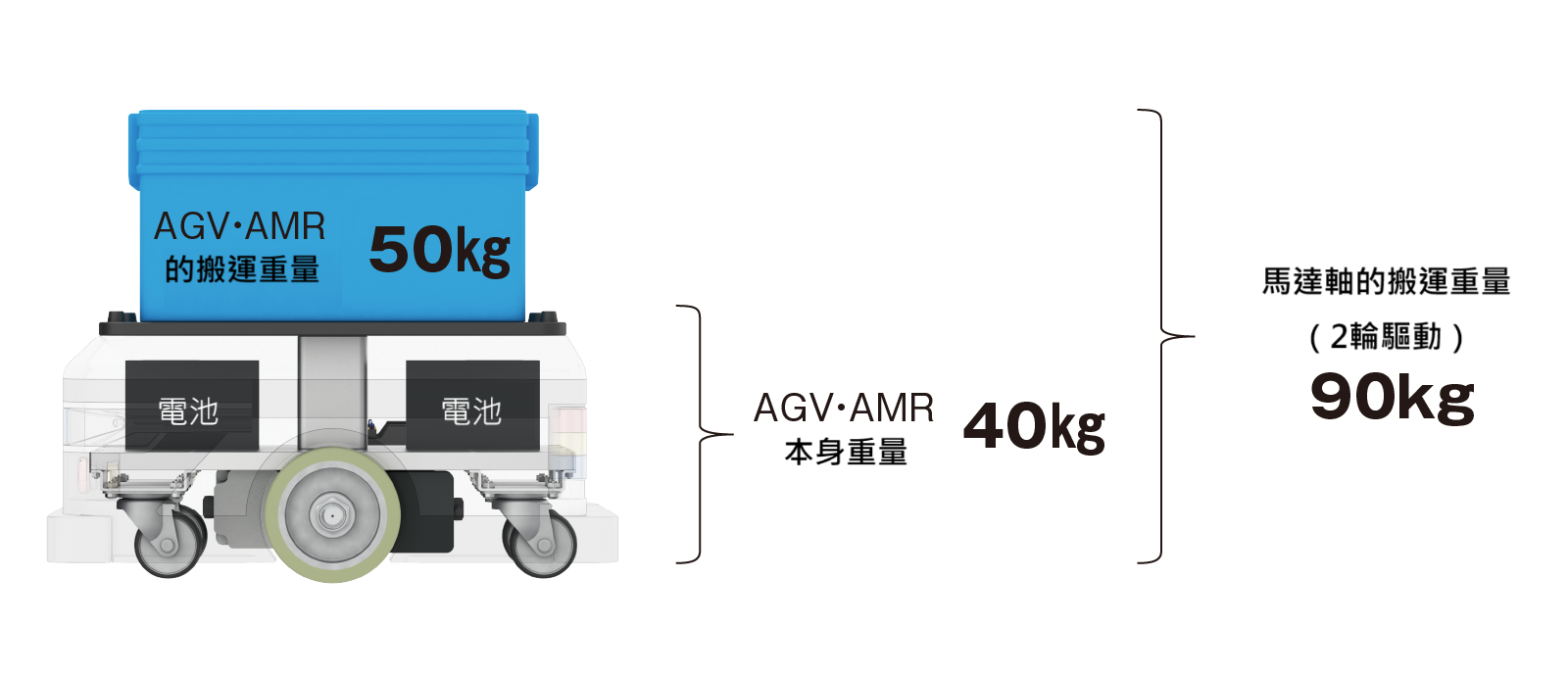
| 運轉條件 | 搬運重量 | 50kg |

|
|---|---|---|---|
| 搬運速度 | 30m/min | ||
| 台車效率 | 0.9 | ||
| 外力 | 0N(無) | ||
| 加速時間 | 固定為2s | ||
| 慣性 慣量 |
無瞬間停止 | ||
| 安全率 | 2以上 (負載、瞬間最大) |
||
| 路面 | 平坦、無傾斜 | ||
| 預設的車輪條件 | 車輪直徑Φ | 100mm |
|
| 車輪寬度 | 32mm | ||
| 橡膠密度 | 1.2 | ||
| 摩擦係數 | 0.1(與路面的摩擦係數) |

選用結果
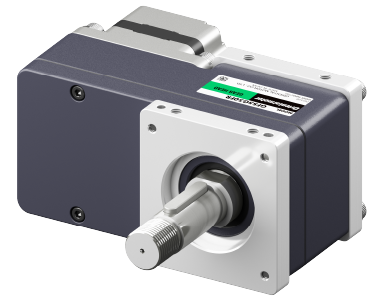
| 馬達 | BLMR460SHK-GFV | 輸出[W] | 60W |

|
|---|---|---|---|---|
| 減速機 | GFS4G30FR | 減速比 | 30 | |
| 減速機/馬達 | 重量 | 2.1㎏ | ||
| 馬達軸的搬運重量 | (2軸驅動) | 90㎏ |
|
|
| 搬運速度 | (最大可搬時) | 30m/min | ||
控制所需的機構車輪資訊
初期設定
| 選擇車輪 | 設定車輪資訊 | 減速機減速比 |
|---|---|---|

|

|

|

|

|
-
-

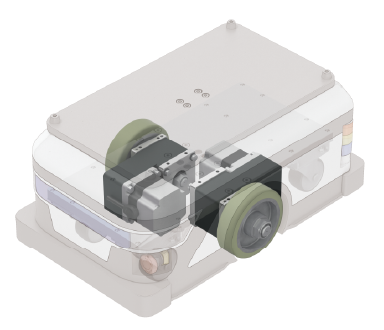
除了座標轉換、控制左右車輪速度之外,本公司近日也將推出搭載IMU檢知器的移動機器人控制器MVC01,請務必向設計軟體的客戶介紹。還有,別忘了!BLV系列R型的產品種類新增「驅動車輪用馬達」,只要加裝車輪即可作為低底盤設計的AGV、AMR的底盤。藉此可以節省機械設計及組裝工時,請一定要推薦給客戶。
移動機器人控制器
MVC01
這次的重點
- 選用搬運機器人時需要考慮車輪寬度。車輪寬度越大則慣性越大,馬達所需的轉矩也會隨之提高。另外,設置在地板上的面積如果越大,則抓地力也會提高,就能夠穩定運轉。
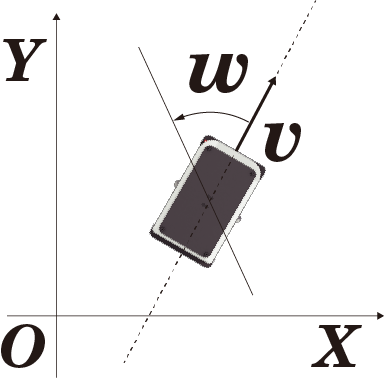
- 控制所需的機構資訊有「車輪半徑」「左右車輪中心間的距離」「減速機減速比」這3項。使用這3個值就可以進行座標的轉換計算來控制位置,或是在轉彎時控制左右車輪的速度。