close
※您也可以搜尋和比較舊產品和替代品。
嗯……
你好像在煩惱什麼。怎麼了?
客戶委託我選用步進馬達,要用在分度盤驅動部。我用客戶機構的負載慣性慣量值計算了慣性慣量比,結果發現慣性慣量比太大,αSTEP AZ系列沒有符合條件的馬達……
【表(1)】
有試著用減速機型進行選用計算嗎?如果是負載慣性慣量大的機構,推薦用減速機型。請看一下表(2)的公式。選用減速機型的話,就可以讓慣性慣量比變小。
【表(2)】
原來如此!如果是減速機型,應該就可以用在客戶的機構上了。不過,步進馬達的減速機型有很多種類,好像很難選……
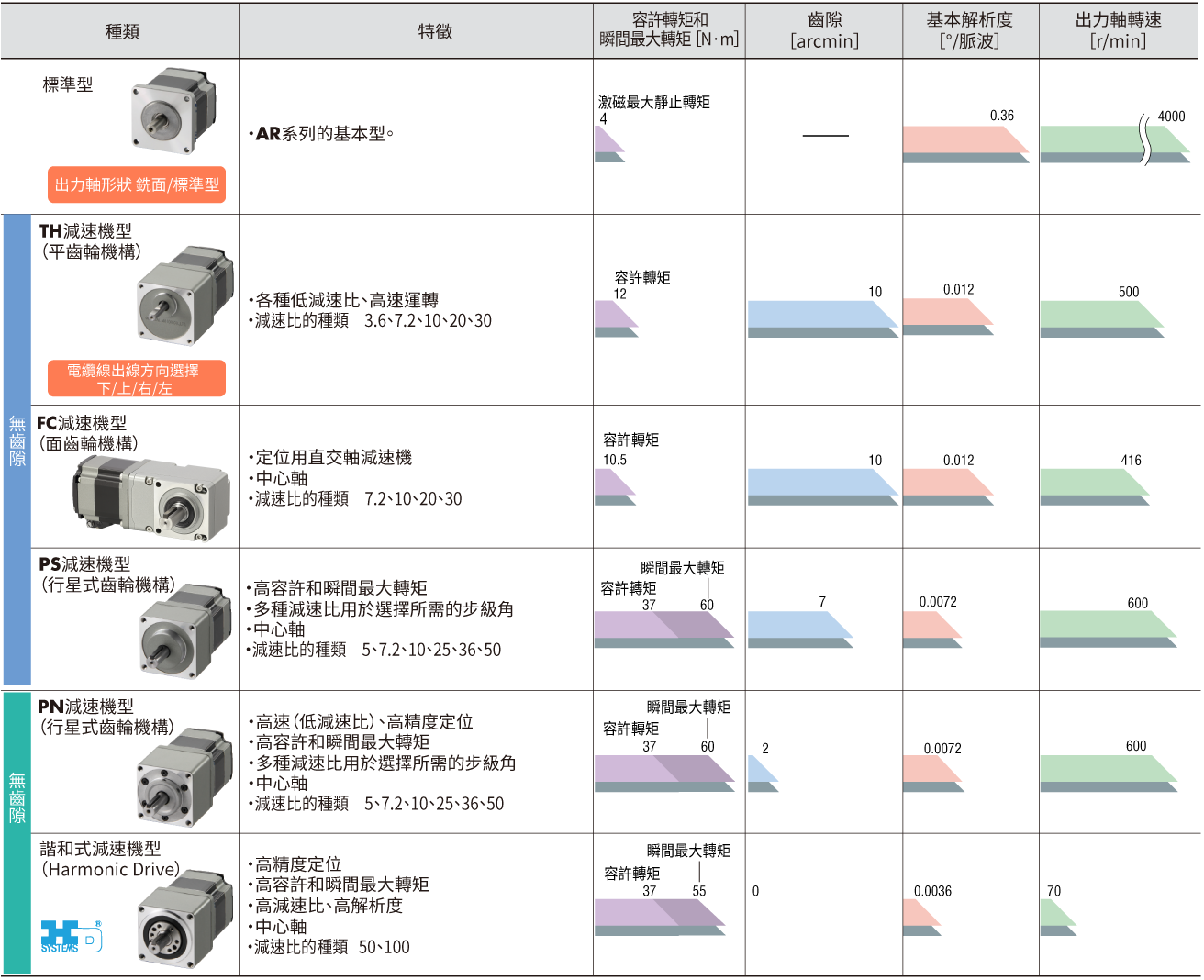
那就一個一個比較哪邊不同吧。目錄上也有刊載可供簡單比較的表格喔。比如說你看下表,看得出來有哪裡不同嗎?
【表(3)】(點選畫面放大顯示)
畫面放大顯示
嗯,容許轉矩不同,還有齒隙值也不同。我記得,齒隙就是指減速機齒輪中兩個小齒之間的縫隙對吧?
是啊。除了要確認驅動設備的必要轉矩是否在容許轉矩範圍內,也必須確認能夠確保多少安全率。另外,有別於AC馬達,步進馬達相當要求定位精度,因此齒隙值會是選擇時的重要因素。
原來如此!光計算出慣性慣量比和轉矩是無法選擇的啊。要確認客戶的定位精度,如果對精度的要求相對嚴格,就推薦他們使用諧和式減速機。咦,不同系列的減速比種類也不同啊。為什麼會有像3.6或7.2這種不上不下的減速比呢?
提示就在步進馬達的解析度。比如說,達弟剛剛想選用的αSTEP AR系列,每一脈波會移動幾度呢?
嗯,αSTEP AR系列每一脈波會移動0.36°對吧……啊!這麼一來,如果減速比是3.6,減速機出力軸就會在每一脈波移動0.1°,比較容易分割角度。
是啊。有確實考量到這點呢。針對客戶想分割的角度,必須確實選擇減速比,讓解析度能夠確實分割。萬一選到的減速比在分割時無法除盡,偏移量就會不斷累積。
原來如此。也必須考慮客戶的轉速。我再確認一次運轉條件和機構條件,重新選用αSTEP AR系列的減速機型。
AR系列是高效率馬達,即使是在頻繁反覆定位的情形也能抑制發熱。
是啊。因為不用在意驅動週期,提案上就能提升設備的生產節拍。
達弟,你也變得更熟悉產品了呢,之後也要預先學習依客戶的條件做選用計算喔。
好的!
αSTEP
「教教我吧!馬姐」正在募集大家的問題。請告訴我們想要讓馬姐解說的問題、或是經常遇到的馬達相關疑問。
※您提交的意見可能會作為「教教我吧!馬姐」的主題。 我們不會直接回覆您提交的內容,敬請見諒。