專為半導體產業提供的解決方案
組裝、加工、檢查設備的提案
介紹在執行多道製程的設備上,於上下料設備、移載製程、加工製程中導入αSTEP AZ系列的優點。
系統構成
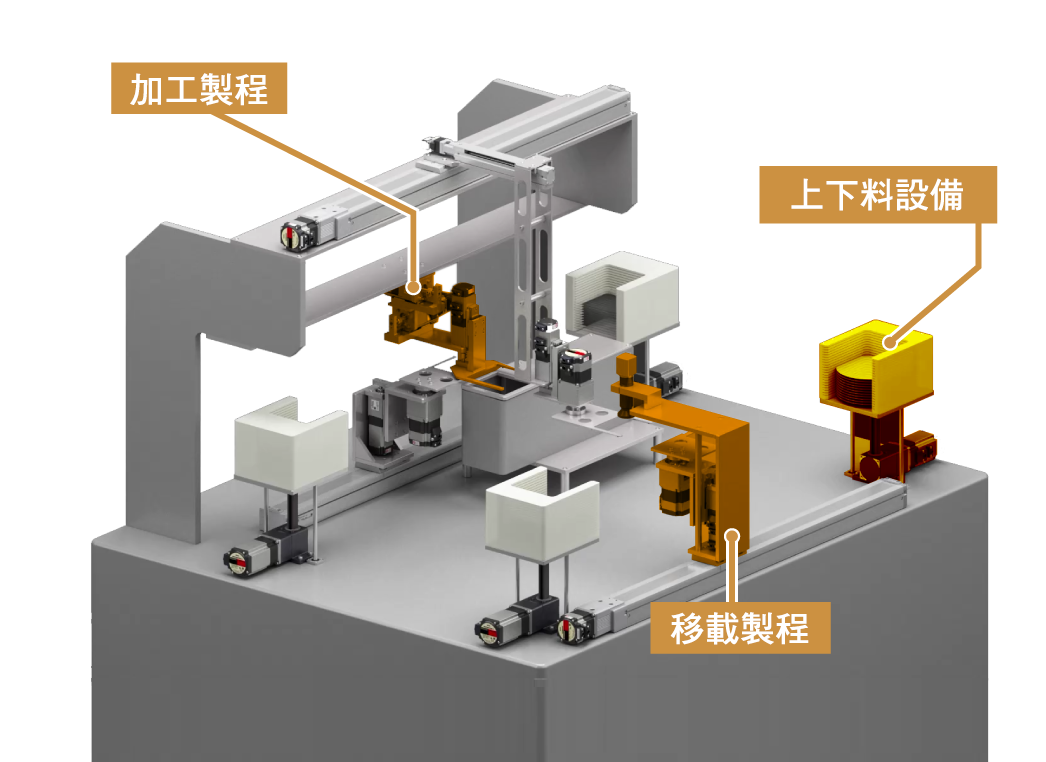

上下料設備
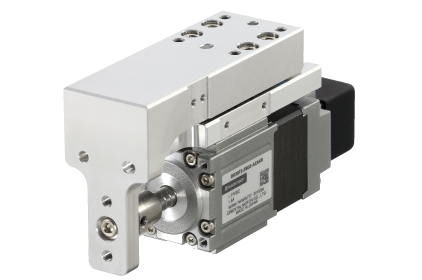
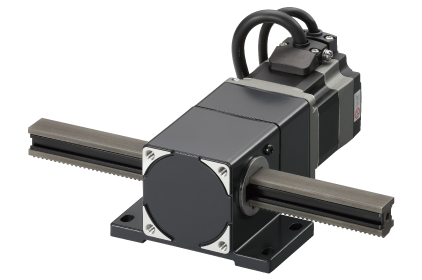
透過採用將步進馬達和齒條·齒輪一體化的直線馬達,輕鬆實現高負載、高精度的上下驅動。
簡單建構「輕巧」、「高強度」的直線動作機構
齒條·齒輪系統L系列可將馬達的運轉運動簡單轉換為直線運動。
直動機構部雖然設計輕巧,但由於施以高強度加工,因此可搬運較大的負載。
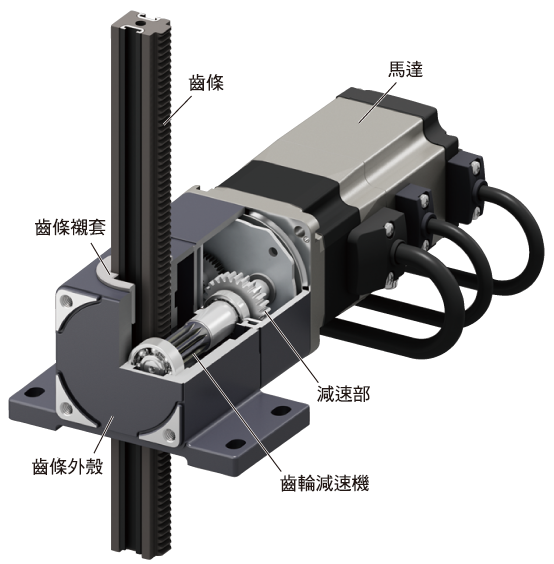
齒條·齒輪系統的動作
齒輪軸的馬達經由減速機(減速部)承受,再從齒輪減速機傳達至齒條,轉換為直線動作。
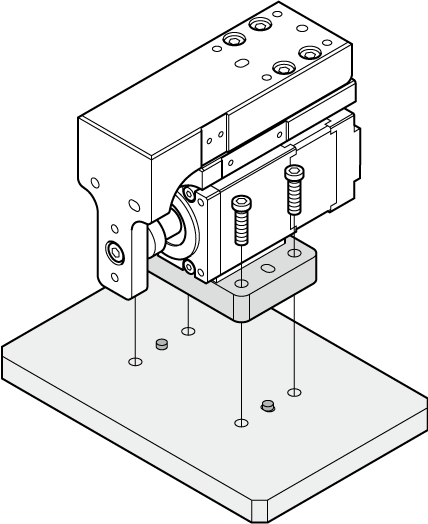
所需零件少,縮短設計及組裝時間
由於齒條·齒輪系統組裝所需的零件數量較少,能減少設計(部件選用、機構檢討、設計圖管理等)及組裝所需的工時,有助於縮短設備完成的時間。此外,固定齒條兩端即可使馬達自行移動,因此可以設置在設備高度受限的場所。
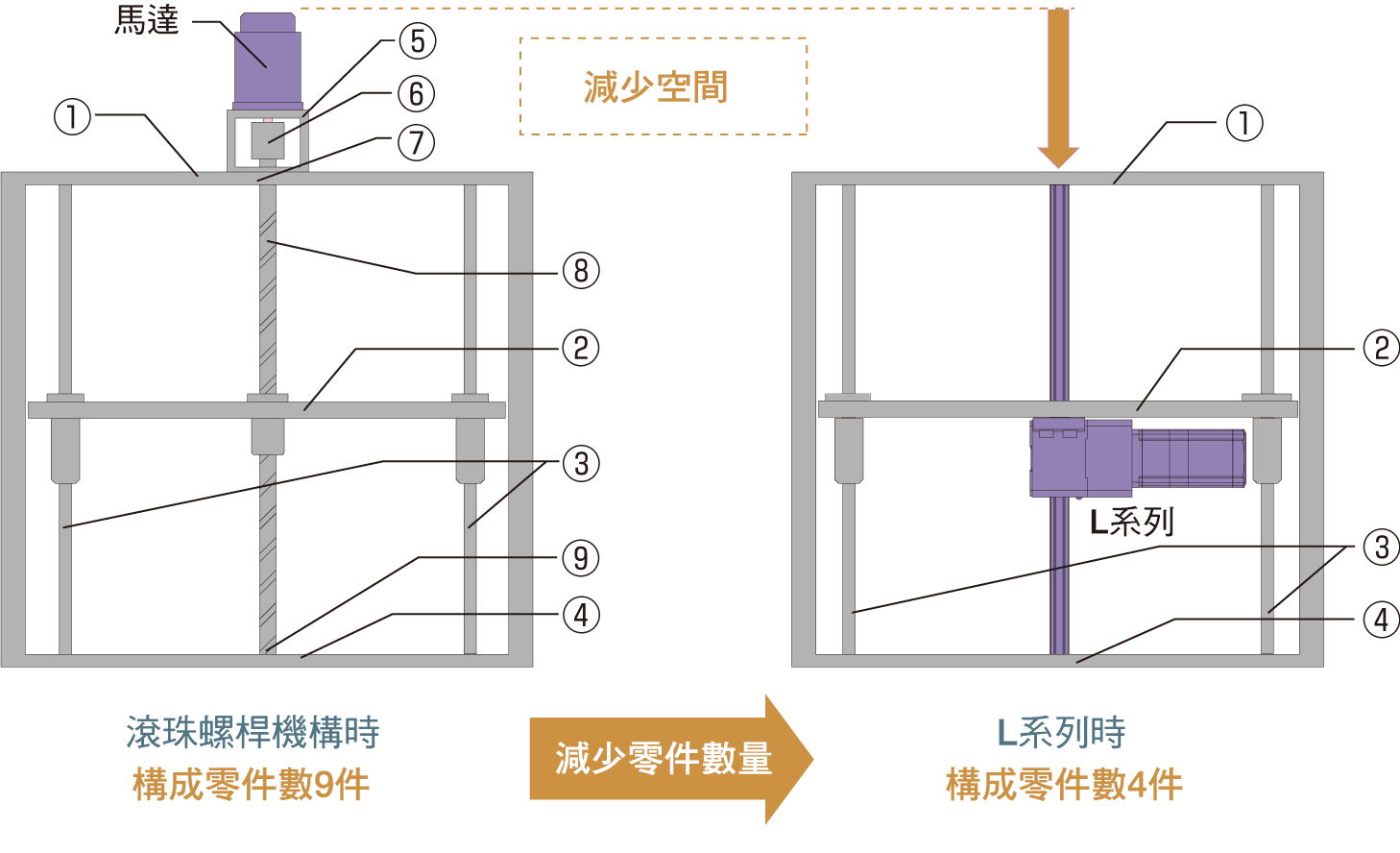
【使用零件】
①固定側擋塊 ②搬運工作台 ③直線導軌 ④支持側擋塊 ⑤聯軸器外殼 ⑥聯軸器 ⑦固定側軸承 ⑧滾珠螺桿 ⑨支持側軸承
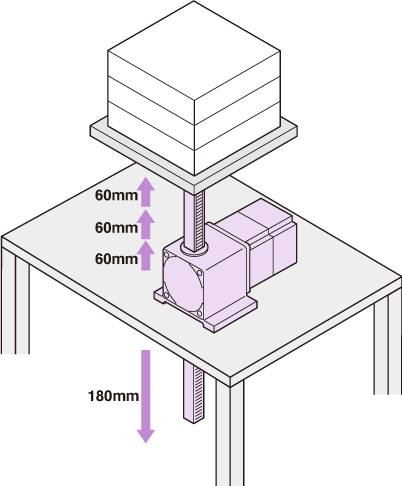
高精度定位
藉由活用齒條的移動方向(垂直),實現高反覆定位精度,可使工作物進行高精度的升降。
反覆定位精度(參考值)
為可搬重量時的實測值。因負載、驅動條件、安裝方向而變化。
| 品名 | 齒條移動方法 | 反覆定位精度[mm] |
|---|---|---|
| LM2 | 平行 | ±0.25 |
| LM4 | ||
| LM2 | 垂直 | ±0.07 |
| LM4 |
上下驅動亦相當簡單。若需實施防掉落對策,
亦備有附電磁剎車的機種。
可以mm為單位設定
驅動馬達採用αSTEP AZ系列。
使用資料設定軟體MEXE02即可輕鬆以mm為單位設定移動量,實現各種直線動作的用途。
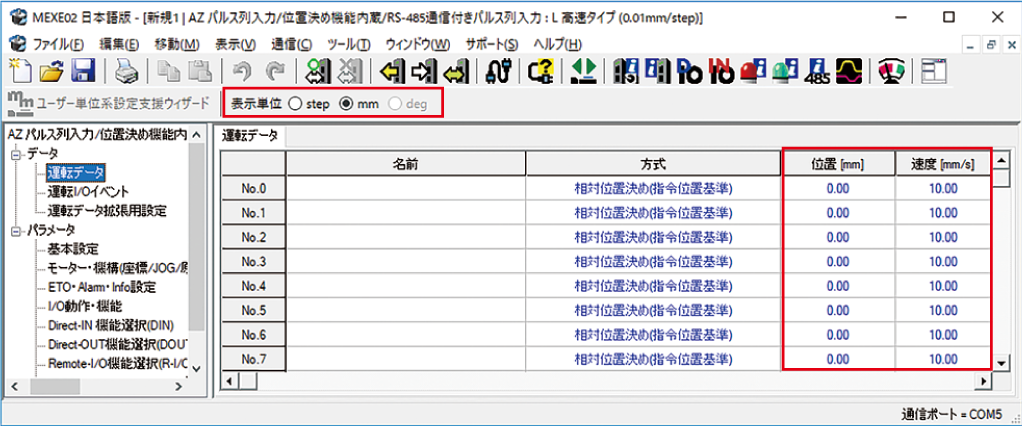
- 【最小移動量】
- 高速型 0.01mm
高可搬重量型 0.001mm
- 【使用速度範圍】
- 0 ~ 500mm/s(高速型)
0 ~ 90mm/s(高可搬重量型,安裝尺寸60mm)
0 ~ 40mm/s(高可搬重量型,安裝尺寸80mm)
何謂
αSTEP是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的特性。αSTEP可隨時監視位置,依狀況自動切換為開回路控制或閉回路控制。一般狀況下,可透過開回路控制與指令同步驅動,發揮高響應性。假設成為過負載狀態,位置偏差在±1.8°以上時,則切換為與伺服馬達相同的閉回路控制,進行修正動作。是一款兼具操作性及穩定性的馬達。
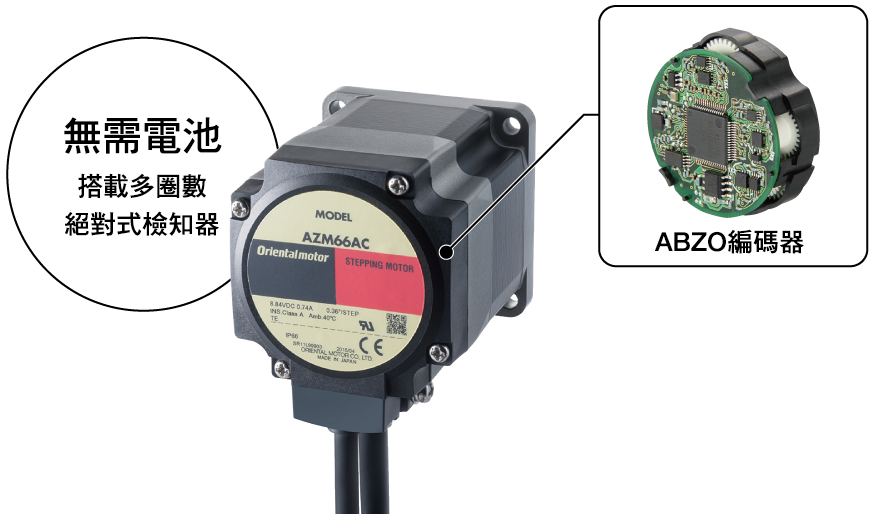
藉由ABZO編碼器管理位置資訊,減少因檢知器問題而導致設備停止
αSTEP AZ系列搭載即時管理位置資訊的多圈數絕對式編碼器(ABZO編碼器)。由於為絕對式系統,因此不需要原點檢知器、極限檢知器等外部檢知器。不僅減少部件成本及配線工時,也能減少因檢知器斷線或檢知錯誤等而產生的問題,有助於降低成本。
相關產品
齒條·齒輪系統L系列可將馬達的運轉運動簡單轉換為直線運動。
直動機構部雖然設計輕巧,但由於施以高強度加工,因此可搬運較大的負載。

齒條·齒輪系統為組合齒條·齒輪機構與馬達的電動模組產品。
馬達部採用搭載無需電池ABZO編碼器的αSTEP AZ系列,除了高精度定位,還可搬運最高100kg的高載重。
移載製程
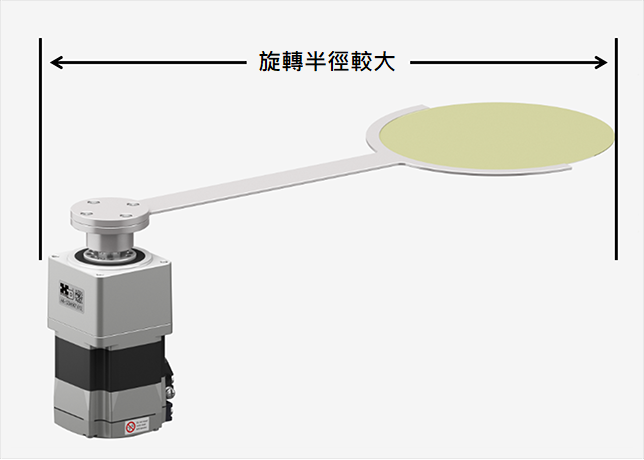
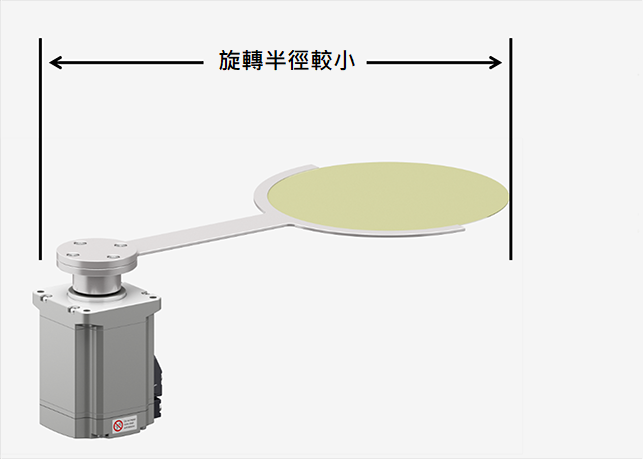
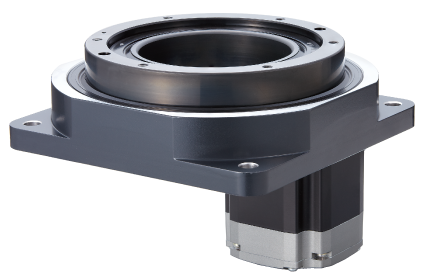
採用無齒隙減速機步進馬達,能以高精度驅動較大的慣性負載。
無外部檢知器即可進行原點復歸
αSTEP AZ系列於馬達後部搭載無需電池的機械式絕對式編碼器(ABZO編碼器)。不須花時間進行檢知器原點復歸,也不會受到外部檢知器問題的影響。
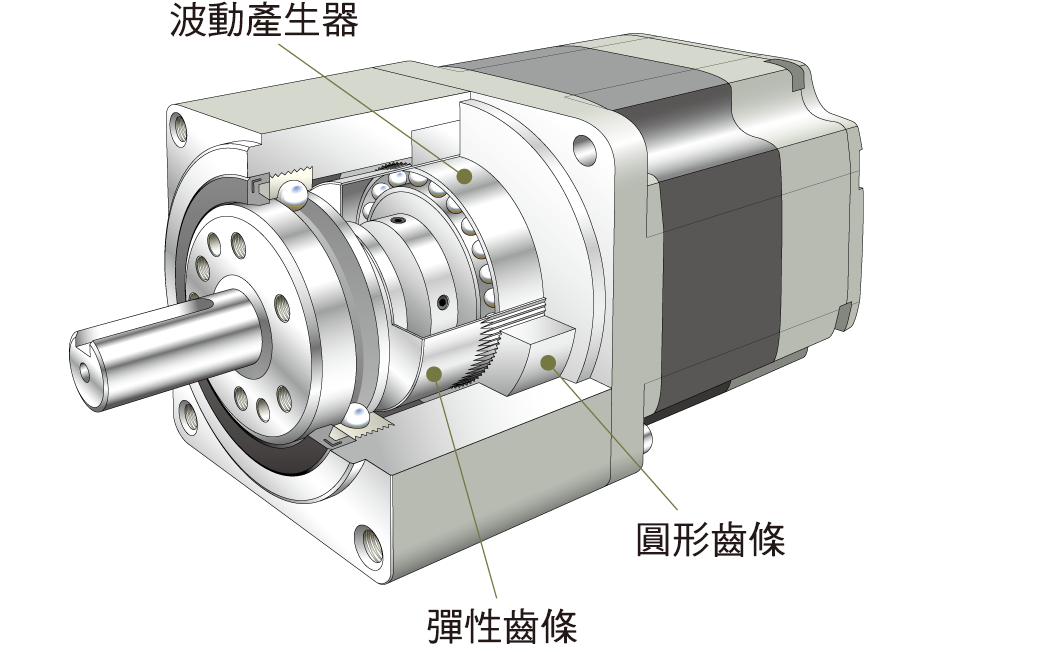
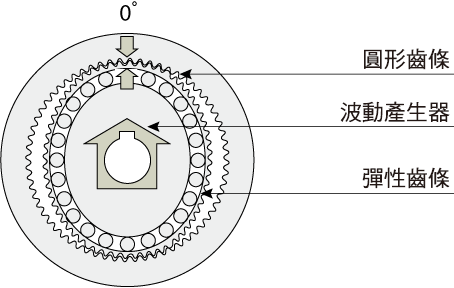
高精度、無齒隙
諧和式減速機與使用一般平齒輪的減速機不同,由於沒有齒隙(齒和齒咬合的間隙),因此能發揮無與倫比的優異定位精度。同時又因咬合齒數多,其小齒的螺距誤差或累積螺距誤差對運轉精度的影響會被平均分散,可得到較高的定位精度。
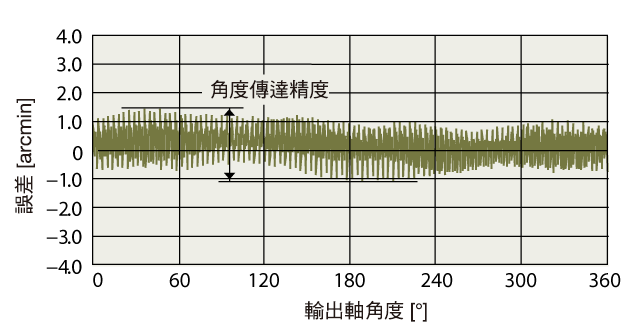
| 品名 | 角度傳達精度[arcmin] |
|---|---|
| AZM46-HS□ | 1.5(0.025˚) |
| AZM66-HS□ | |
| AZM98-HS□ | (0.017˚) |
驅動大慣性負載
諧和式減速機的剛性高可抗扭轉,不像標準馬達易受負載轉矩變動的影響。
即使是大的慣性體或負載變化大,也能穩定進行高精度定位。
| AZ系列 AZM66AK-HS50 轉子慣性慣量 |
NX系列 NX620A 轉子慣性慣量 |
|---|---|
| 405×10-7 [kg·m2] | 162×10-7 [kg·m2] |

|
|
| AZ系列 AZM66AK-HS50 轉子慣性慣量 |
NX系列 NX620A 轉子慣性慣量 |
| 30375×10-4 [kg·m2] | 20250×10-4 [kg·m2] |
|
|
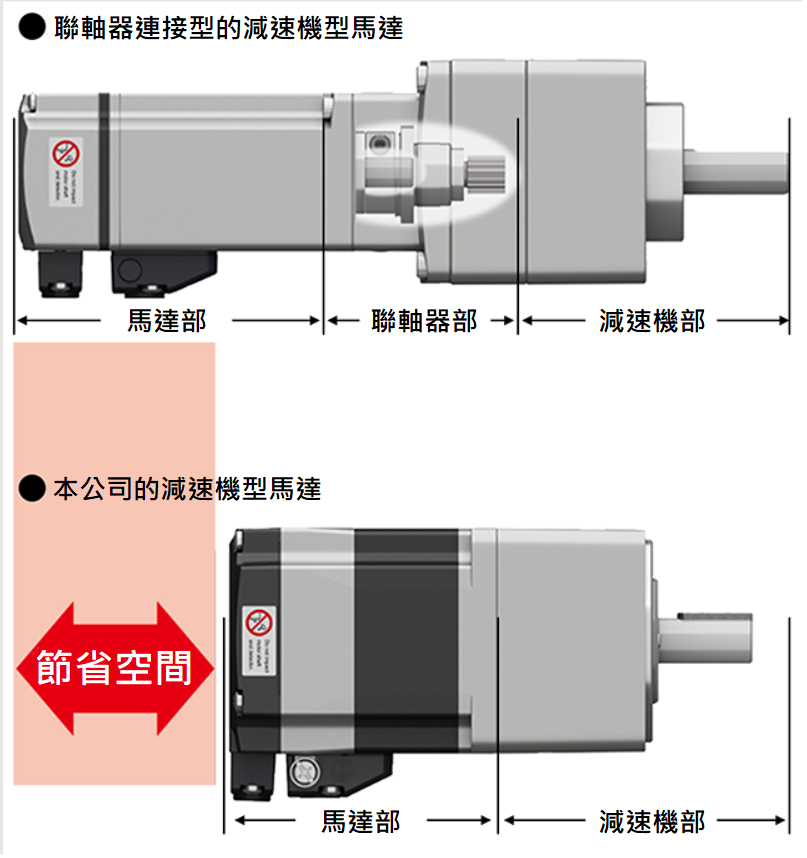
一體化、小型化
本公司的減速機型馬達,在馬達出力軸直接形成齒輪,不需要聯軸器並可節省空間。
相關產品

搭載新開發ABZO編碼器,實現無需電池的絕對式系統。
驅動器有脈波列輸入型、I/O控制的內藏定位型及支援網路的驅動器,可配合用途選用。
提供諧和式減速機型等多樣化的馬達。100kg的高載重。
加工製程
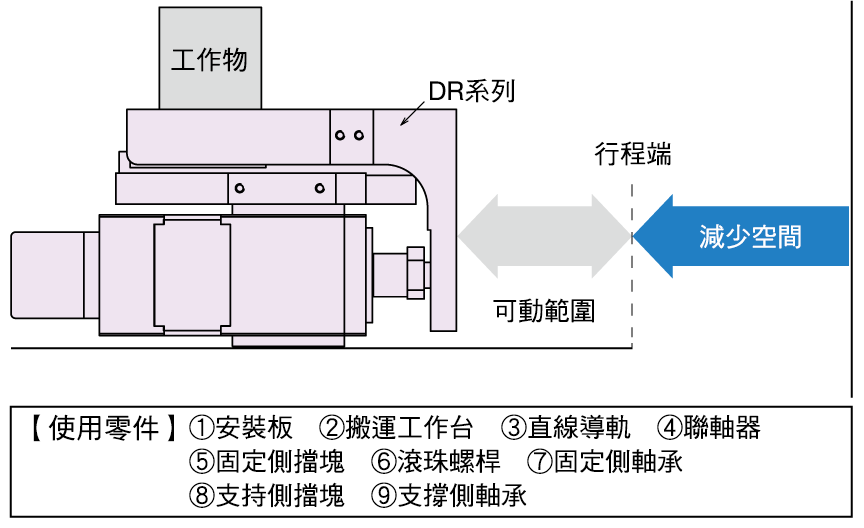
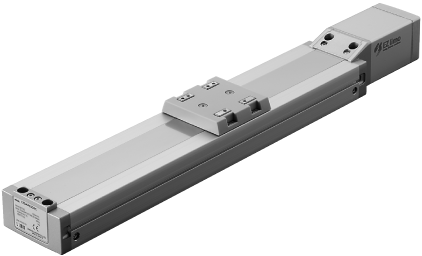
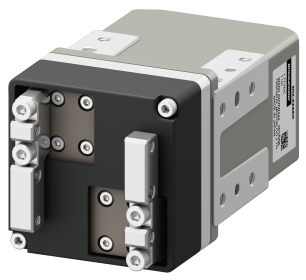
採用步進馬達與滾珠螺桿一體化的輕巧電動缸,與自製機構相比,設備更為輕巧。
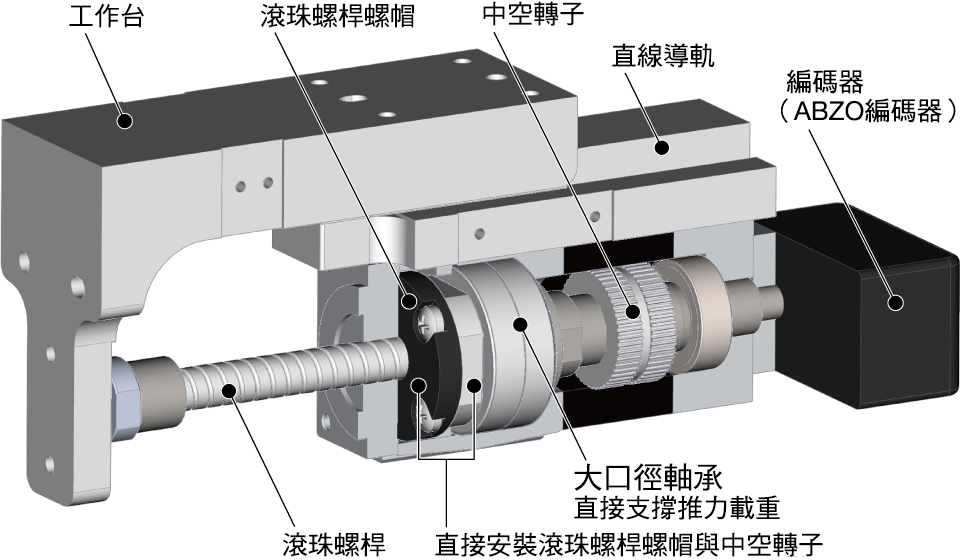
最適用於微小移動量、高精度定位
不使用聯軸器等連結零件,將中空轉子與滾珠螺桿螺帽一體化,減少因為零件剛性或組合導致的齒隙影響。
備有研磨滾珠螺桿與轉造滾珠螺桿2個種類
【最小移動量】0.001mm
【反覆定位精度】
研磨滾珠螺桿:±0.003mm
轉造滾珠螺桿:±0.01mm
將直線動作機構收納於輕巧的機體中
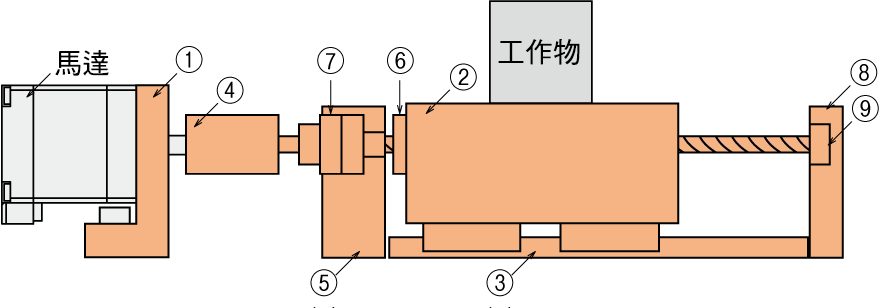
由於不需要直線導軌和聯軸器等連結零件,機構整體可小型化。與自製的機構相比,必要部件大幅減少。
| 品名 | 構成零件數 | 構成示意圖 | 構成零件 |
|---|---|---|---|
| 自行組裝時 | 9個 |
|
①安裝板 ②搬運工作台 ③直線導軌 ④聯軸器 ⑤固定側擋塊 ⑥滾珠螺桿 ⑦固定側軸承 ⑧支持側擋塊 ⑨支持側軸承 |
| 使用DR系列附導軌型時 | 0個 |
|
ー |
多樣的安裝方法
有多種安裝方法,能配合有限空間彈性選擇安裝方法。
使用多種組合構成XYZ組合,讓設備更為輕巧。
安裝參考範例
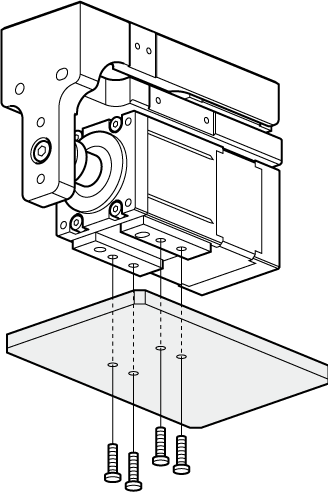
正面安裝

側面安裝
使用凸緣安裝
(標準型除外)
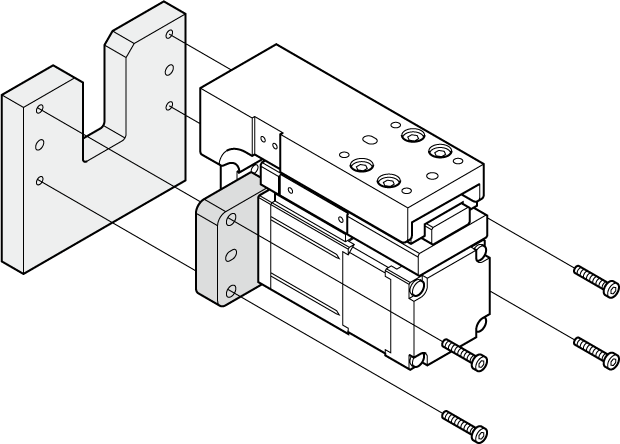
使用腳座安裝
(DR20標準型除外)
圖為附導軌型。
不需要外部檢知器及裝置空間
搭載αSTEP AZ系列的輕巧本體,實現設備的小型化及輕量化。
透過ABZO編碼器以機械方式管理位置資訊,因此無需原點檢知器、極限檢知器等外部檢知器。
可避免使用外部檢知器所需的定期維修等問題。

相關產品

αSTEP與滾珠螺桿一體化的輕巧本體,有助於實現設備的小型化並節省空間。
由於設備前端輕量化,可望提高設計的自由度。
驅動馬達搭載αSTEP AZ系列,採用無需電池的絕對式編碼器(ABZO編碼器),因此不需要原點檢知器、極限檢知器等外部檢知器。
藉由統一控制實現多樣化的動作
αSTEP AZ系列的產品種類廣泛,包含馬達附電磁剎車、減速機型等產品。
此外,亦備有將機構製品組合於馬達的電動模組產品。
藉由共用的馬達和電纜線統一配線或控制,有助於縮短設備組裝的時間。
關於相關商品的詳細資訊,請點選以下連結

統一的優點
-
配線統一
I/O的PIN腳位配置相同,可有效率地進行電氣設計與配線作業。
-
控制統一
控制方法相同,可利用相同方法驅動。網路控制時,遠端I/O和命令代碼相同,因此可節省程式編寫時間。
-
維修零件統一
馬達、驅動器、電纜線等皆為共用,因此能控制維修部件的數量,有助於節省管理成本(庫存費用及庫存空間)。
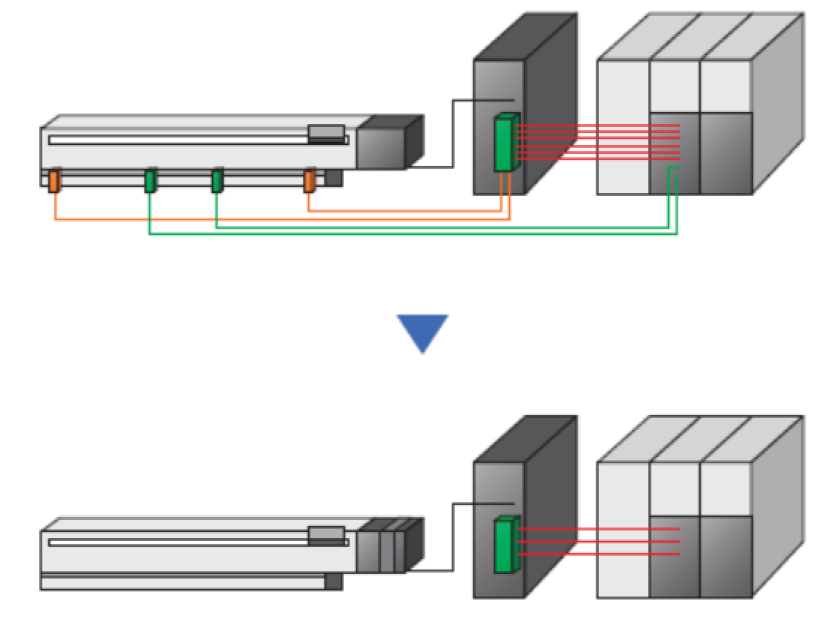
多軸驅動器
αSTEP AZ系列多軸驅動器備有2軸、3軸及4軸型。
一台驅動器能控制多台馬達,簡化與上位PLC之間的配線。
多軸驅動器 4軸型

主電源電纜線:4條
通訊電纜線:4條
馬達用電纜線:8條
合計:16條


主電源電纜線:1條
控制電源電纜線:1條
通訊電纜線:1條
馬達用電纜線:4條
合計:7條
不需要外部檢知器
AZ系列搭載機械式絕對式編碼器(ABZO編碼器),透過即時管理位置資訊,可以省去原點復歸所需的外部檢知器。CG設備採用的5軸皆不需要外部檢知器。不只能減少零件成本,縮短配線時間,還能減少因斷線導致檢知錯誤等檢知器相關問題,有助於節省成本。
縮短原點復歸時間
AZ系列搭載無需電池的機械式絕對式編碼器(ABZO編碼器)。
定位運轉中即使停電或因緊急停止而被切斷電源,仍可保持位置資訊。不使用外部檢知器即可高速進行原點復歸。
相關產品

以閉回路控制實現高穩定性,透過高效率化技術,大幅減低馬達的發熱。無須在意驅動週期,能頻繁進行短距離的定位運轉。

分別提供對應EtherCAT驅動檔、MECHATROLINK-Ⅲ、SSCNETⅢ/H的產品。可連接AZ系列DC電源輸入型的馬達及電動模組產品。