設備自製事例 AGV(無人搬運車)
以本公司生產設備的實例說明AGV(無人搬運車),以及採用產品的要點。
另外也一併介紹為支援設備設計所提供的服務。歡迎於檢討採用時多加洽詢。
設備實例 AGV(無人搬運車)
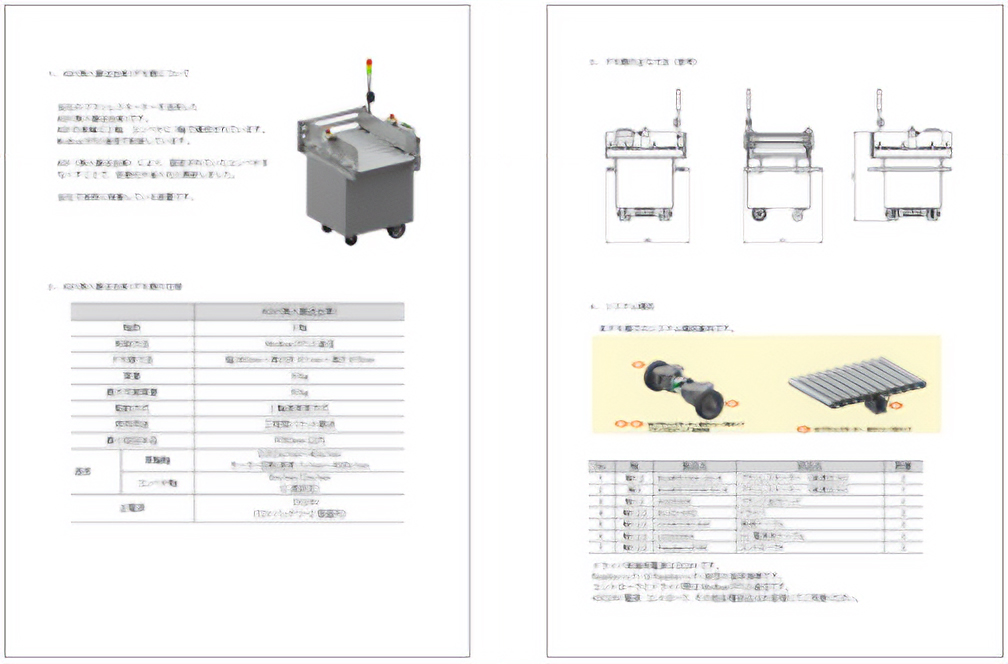
設備概要(使用AGV讓搬運工程自動化)
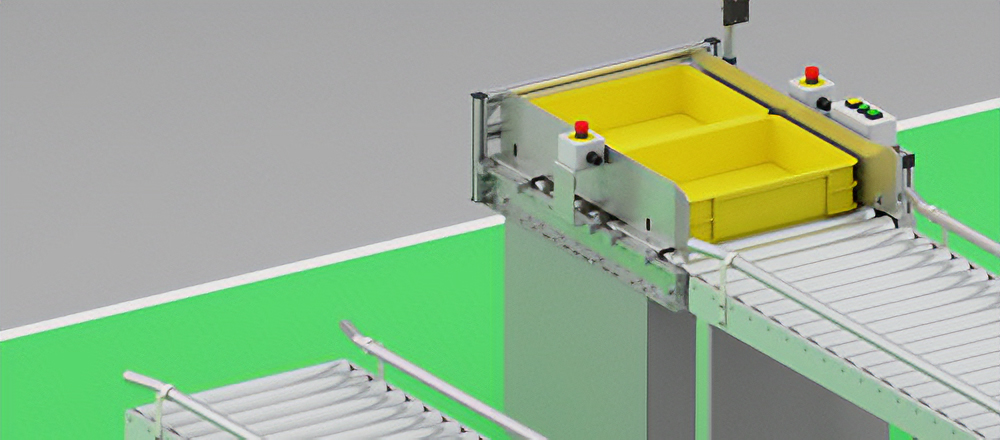
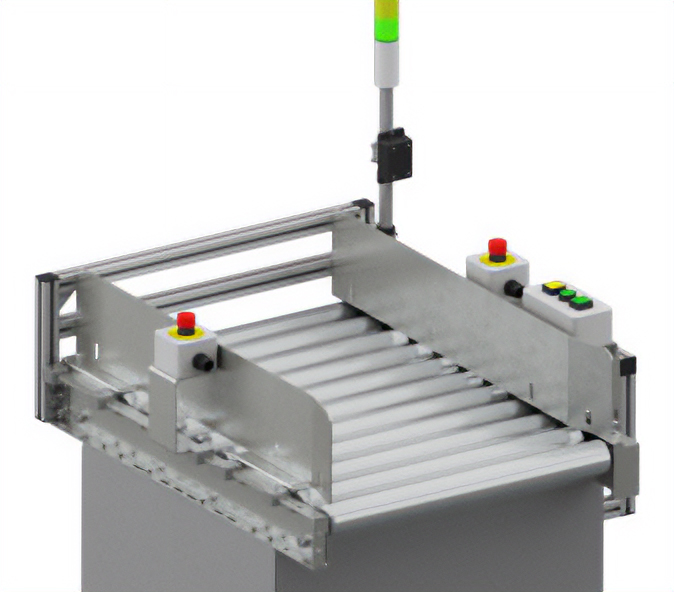
在AGV(無人搬運車)上搭載輸送帶的設備。全軸使用Modbus(RTU)控制。
AGV以2軸馬達及2輪腳輪行走,輸送帶以單軸將工作物搬運至下個製程。
透過此設備,可讓手動搬運工程自動化,減少固定式輸送帶,有利於節省人力。

車輪軸(2軸)
| 設定速度範圍 | 0.016m/min~40m/min |
|---|---|
| 馬達轉速 | 1r/min~4000r/min |
| 最小旋轉半徑 | R760mm以内 |
| 停止精度 | ±2mm |
| 搬運台車重量 | 85kg |
| 主電源 | DC24V(12V電池×2串連) |
輸送帶軸(單軸)
| 最大裝載量 | 40kg |
|---|---|
| 調速 | 6m/min、12m/min (2段速度設定) |
| 速度變動率 | ±0.01% |
構成品一覽表
| 品名 | ||
|---|---|---|
| 車輪軸 | 無刷馬達 | BLMR5100K-30-B |
|
|
法蘭輸出頭 | AGD580B |
| 驅動器 | BLVD-KRD | |
| 連接用電纜線 | CCM010B1AAF | |
| DC電源用電纜線 | LC03D06A | |
| 車輪軸 | 無刷馬達 | BLMR5100K-30-B |
|
|
法蘭輸出頭 | AGD580B |
| 驅動器 | BLVD-KRD | |
| 連接用電纜線 | CCM010B1AAF | |
| DC電源用電纜線 | LC03D06A | |
| 輸送帶軸 | 無刷馬達 | BLMR5100KM-50-B |
|
|
驅動器 | BLVD-KRD |
| 連接用電纜線 | CCM010B1AAF | |
| DC電源用電纜線 | LC03D06A | |



- 馬達電纜線的長度皆為1m。
- DC電源用電纜線的長度皆為0.6m。
- Modbus(RTU)為Schneider Automation Inc.的註冊商標。
車輪軸
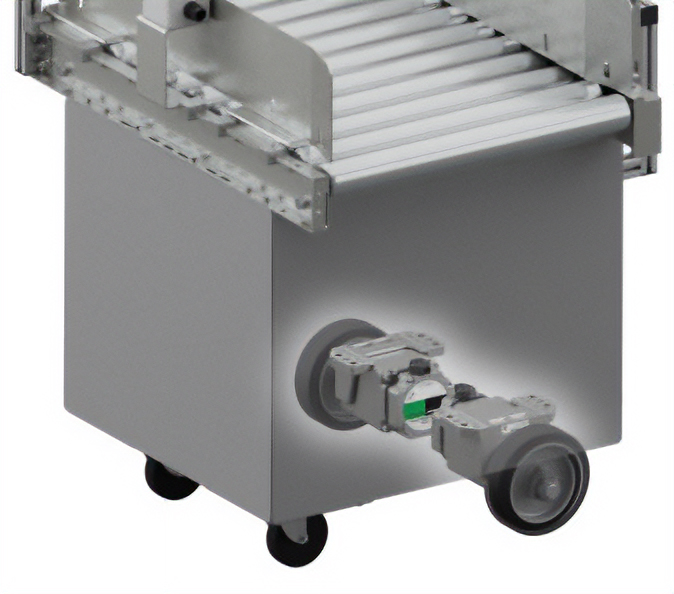
車輪軸
無刷馬達
BLV系列R型 法蘭輸出頭

<高輸出・小型化>無刷馬達 BLV系列R型
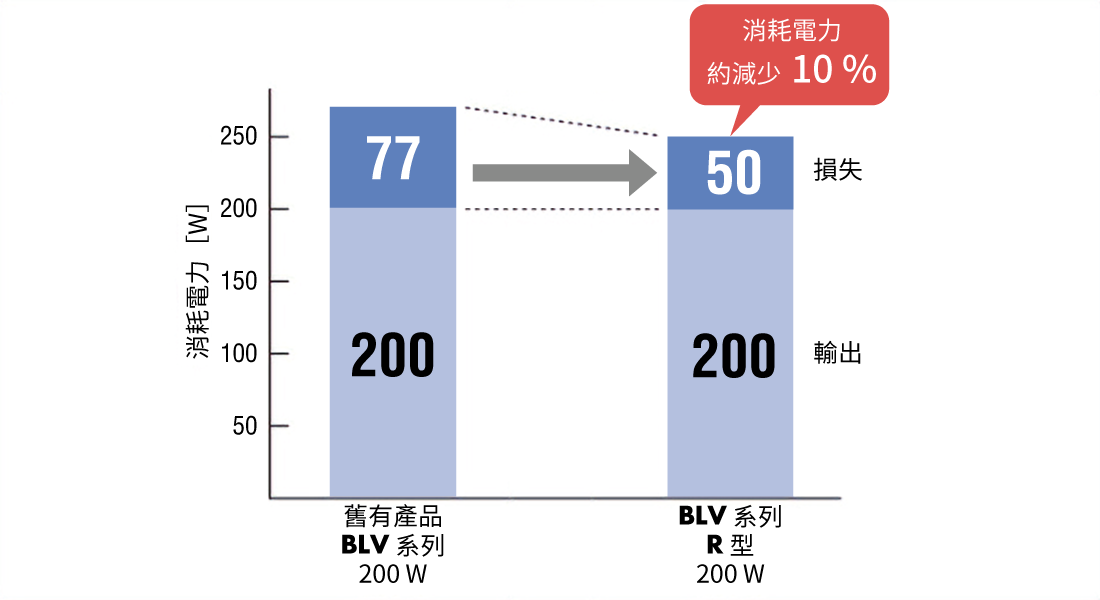
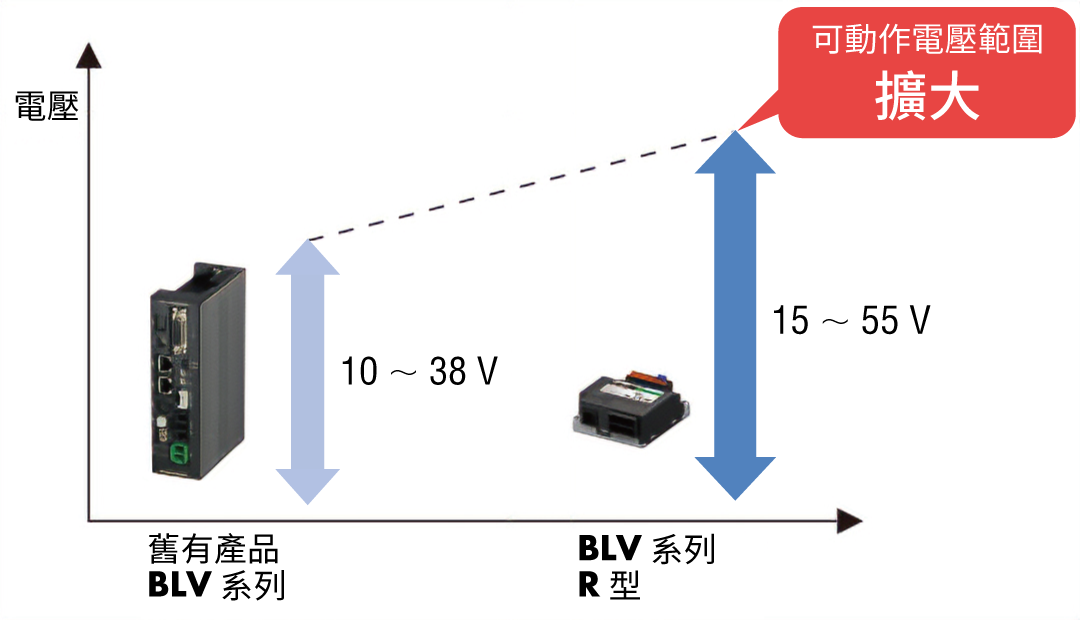
採用電池驅動且方便使用的馬達
選用方便使用的BLV系列R型,不但可動作電壓範圍較大,電池電壓降低時仍然可持續運轉。
此外,由於消耗電力較少,可延長行走距離及時間,並減少電池充電次數。
實現體積小、重量輕的AGV
由於需配合搭載的輸送帶尺寸,且設備設置空間有限,無法將AGV的尺寸再設計得更大。
由於BLV系列R型使用實現體積小、重量輕的馬達及驅動器,可幫助設備小型化及節省空間。
此外,驅動器的體積及重量比起舊有產品減少了80%,提高了設置位置的自由度。
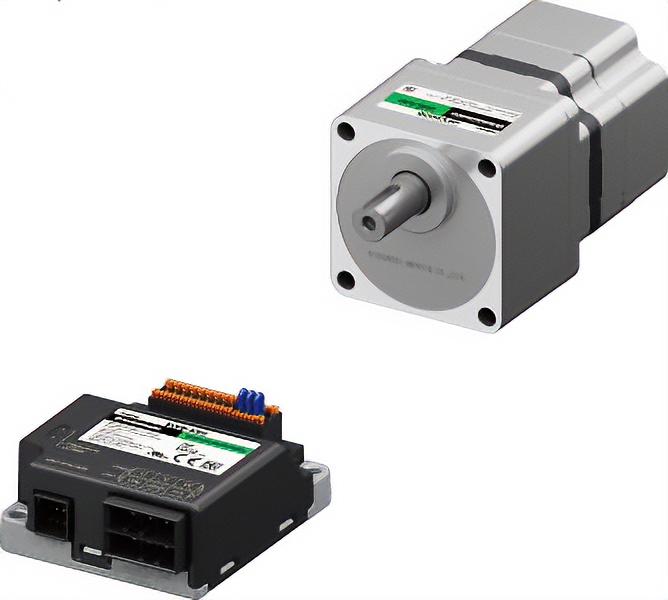
<BLV系列R型 馬達>
<BLV系列R型 驅動器>
實現定位運轉、取得位置資訊
為了使AGV正確運轉,前往下個目標位置,必須使用可定位運轉的馬達。
BLV系列R型的解析度高達0.01°(1圈36,000脈波),不只能正確運轉到目標位置,還能掌握行走狀態及現在位置的細節。

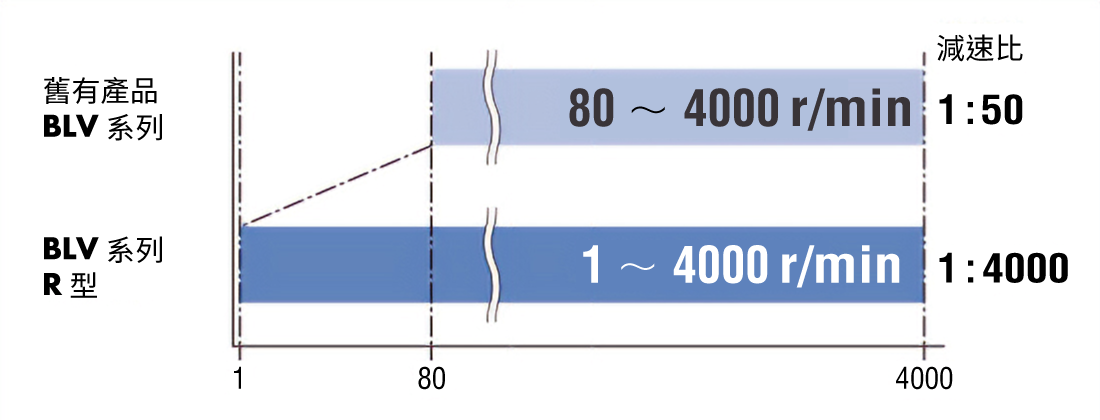
以寬廣的速度控制範圍運轉
能在有限空間運轉,符合AGV需要以低速靈活運轉的需求。
馬達軸能從1r/min起速度控制,因此可加大左右驅動輪的速度差,以達成靈活的運轉。此外,可實現平順的起動及停止。
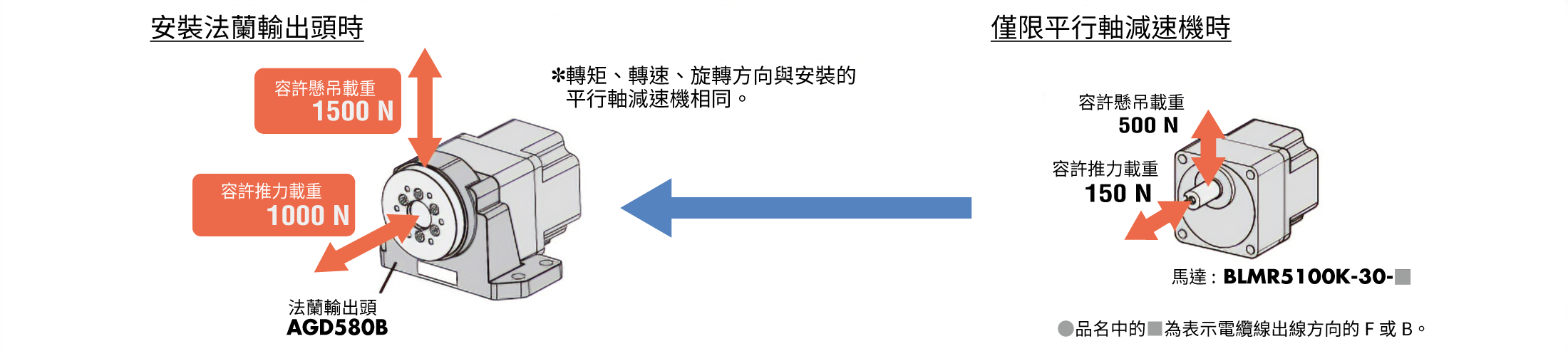
使用法蘭輸出頭提高耐載重
在AGV車輪上安裝了法蘭輸出頭,以符合耐載重的需求。由於載重較一般減速機更大,可承受工作物的設計或重量變更。
此外,由於與Cross Roller軸承及負載安裝用平台採一體化設計,可減少零件調配、機構設計等時間,安裝也更為簡單。

搭載產品
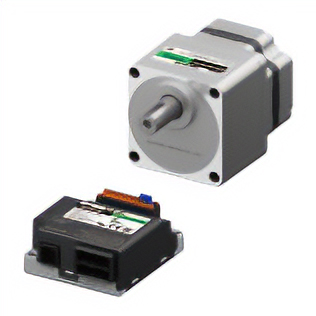
BLV系列R型
實現體積更小、重量更輕的DC電源輸入無刷馬達。可設定自1r/min起的低速運轉,實現順暢的驅動。對應電池驅動,支援更輕巧的機器開發。對應Modbus(RTU)、CANopen通訊。

輸送帶軸
輸送帶軸
無刷馬達
BLV系列R型
<高輸出・小型化> 無刷馬達 BLV系列R型
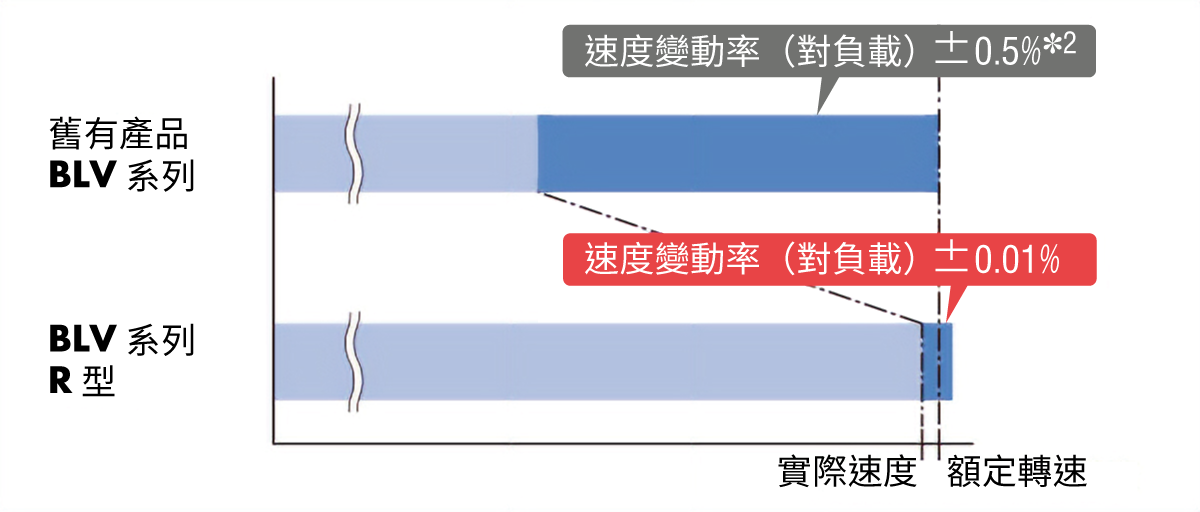
依照設定速度動作的高速度安定性
為了避免降低工作效率,輸送帶軸必須能穩定運轉,不受搬運物重量影響。
BLV系列R型在搬運重量不一的搬運物時,不會因此導致轉速降低,能依照設定速度穩定運轉。
搭載產品
BLV系列R型
實現體積更小、重量更輕的DC電源輸入無刷馬達。可設定自1r/min起的低速運轉,實現順暢的驅動。對應電池驅動,支援更輕巧的機器開發。對應Modbus(RTU)、CANopen通訊。
從產品選用階段開始支援設備設計
-
支援馬達選用
本公司提供可透過電腦選用馬達的方法。
只要輸入運轉條件的數值,即可選擇符合客戶使用方式的產品。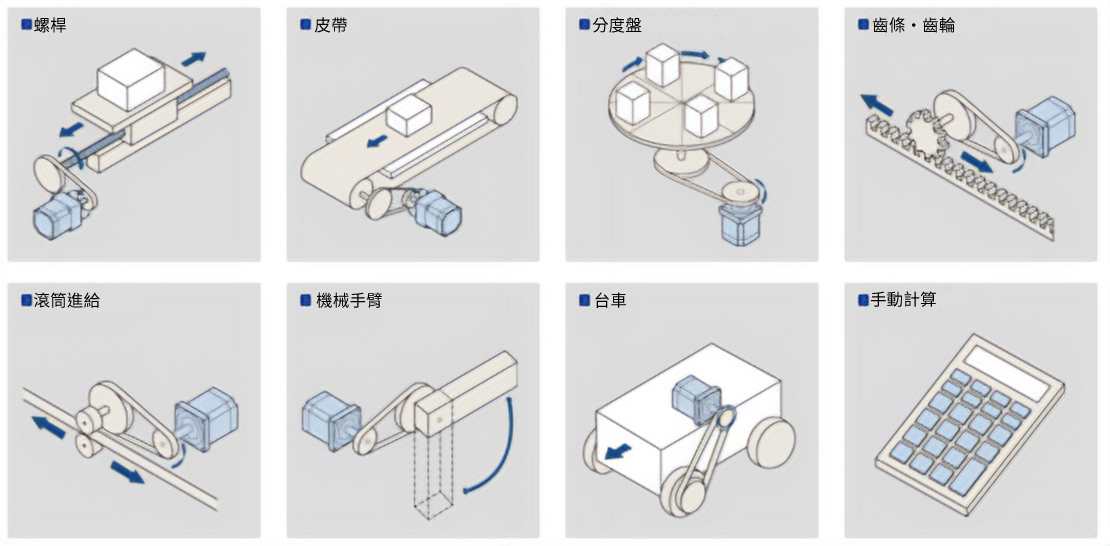
< 馬達選用工具示意圖 > -
備有設備相關資料
備有設備規格、外形尺寸及動作模式相關資料,歡迎於檢討採用同類設備時多加利用。