如何解決擺臂機構大慣量所造成的晃動問題
課題
如何解決擺臂機構大慣量所造成的晃動問題
以往的裝置
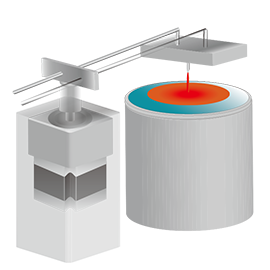
塗佈機使用擺臂控制藥液的注液位置,利用高速旋轉時離心力,讓藥液均勻擴散。
以往的問題
- 擺臂機構為偏心旋轉,雖然轉速慢,但因為慣性慣量大,容易造成定位停止後持續晃動。
- 抖動造成定位不準,導致塗佈膜厚不均勻,產生不良,成本上升。
解決對策
AZ內藏定位型驅動器的活用提案
使用AZ系列。具備高慣性比,搭配減速機再度提高容許慣性,改善擺臂抖動同時縮小馬達體積。

如何驅動大慣性
AZ系列馬達轉子容許慣性比可達30倍。
搭配減速機後,容許慣性提高為減速比的平方倍,大幅提升對於機械結構慣性的承受能力。
馬達出力軸齒輪加工,可與減速機直結,不需連軸結構,總長可較市售減速機再縮短。
減速機馬達為何能大慣性驅動
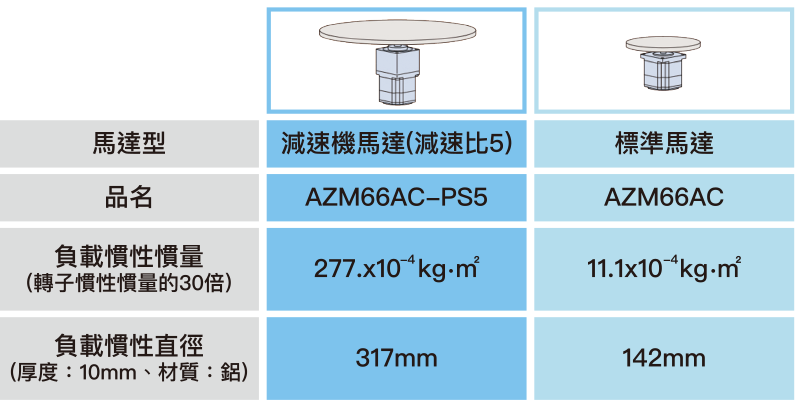
與標準型馬達相較,使用減速機時,可驅動的負載慣性慣量與減速比的 2次方呈正比。因此,馬達雖然小型,卻可以驅動大慣性。
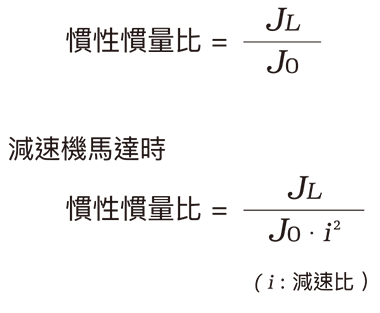
慣性慣量比按以下公式計算
慣性慣量比 = JL/Jo
減速機馬達時
慣性慣量比 = JL/Jo*i平方
(i:減速比)
慣性慣量比(參考值)
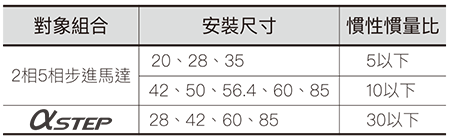
若超過表中數值範圍時,建議使用減速機型。