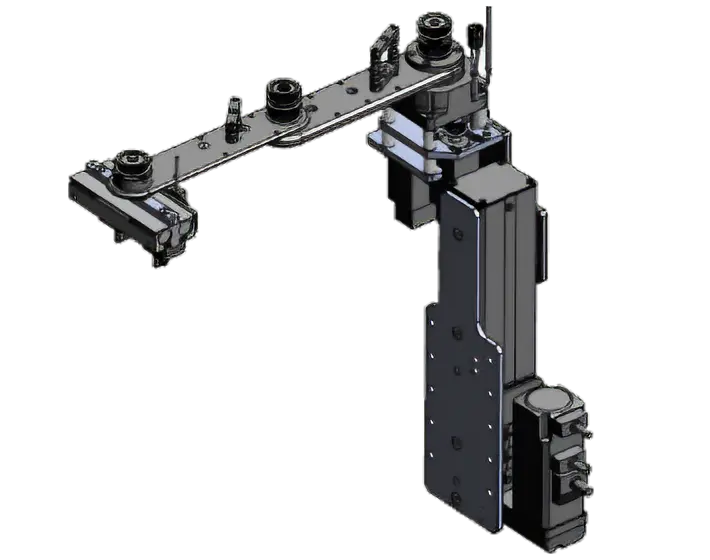
SCARA機器人(水平多關節機器人)自製事例
SCARA機器人 DEMO機
DEMO機概要
此為可讓取放工作物或製程間搬運等動作自動化的自製SCARA機器人。
本設備使用於自動化生產線當中,取代傳統人工黏接、測量、組裝等作業。
因為有著在有限空間內取放工作物或製程間搬運的需求,所以使用了自製的SCARA機器人。

| 軸數 | 5軸(3連結+升降+電動夾爪) | |
|---|---|---|
| 機器人控制 | 機器人控制器MRC01 | |
| 可搬重量 | 0.7kg | |
| 最高速度 | 500mm/s
(夾爪前端的最高速度) |
|
| 各軸的最高速度 | 軸1 | 500mm/s |
| 軸2 | 500mm/s | |
| 軸3 | 500mm/s | |
| 軸4 | 40mm/s | |
| 軸5 | 156mm/s(兩側) | |
| 設備主電源 | AC110V | |
| 驅動/控制用電源 | DC24V | |
| 重量(SCARA機器人部) | 4kg | |
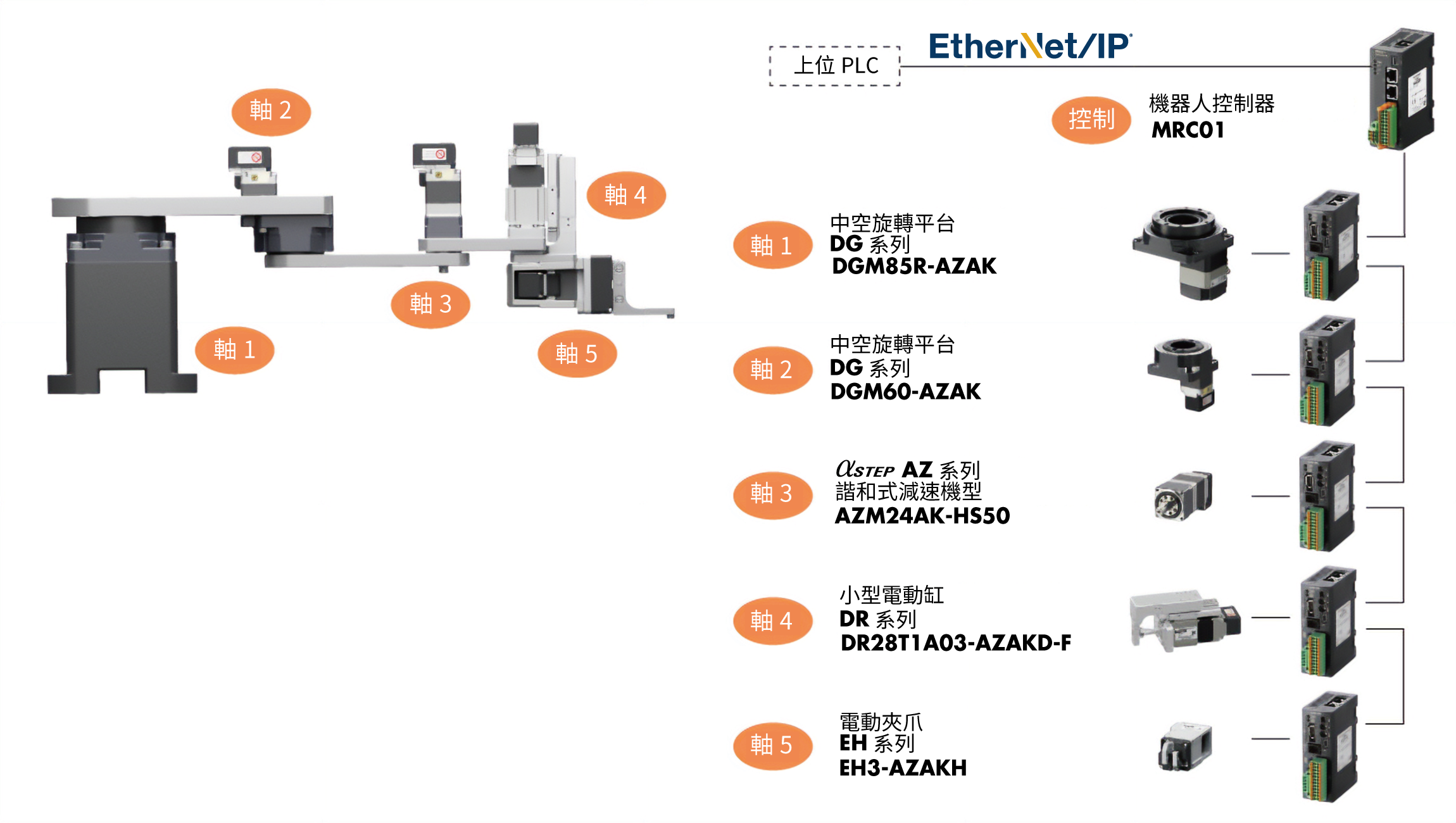
系統構成
使用EtherNet/IP控制。MRC01與AZ系列的驅動器間以RS-485通訊控制。
組裝事例說明
構成品一覽表
| 品名 | ||
|---|---|---|
| 軸1 | 中空旋轉平台 | DGM85R-AZAK |
|
|
驅動器 (內藏定位功能型) |
AZD-KD |
| 可動連接用電纜線 | CC030VZR2 | |
| DC電源用電纜線 | CC02D010-3 | |
| RS-485通訊用電纜線 | CC001-RS4 | |
| 軸2 | 中空旋轉平台 | DGM60-AZAK |
|
|
驅動器 (內藏定位功能型) |
AZD-KD |
| 可動連接用電纜線 | CC030VZ2R2 | |
| DC電源用電纜線 | CC02D010-3 | |
| RS-485通訊用電纜線 | CC001-RS4 | |
| 軸3 | αSTEP 諧和式減速機型 | AZM24AK-HS50 |
|
|
驅動器 (內藏定位功能型) |
AZD-KD |
| 可動連接用電纜線 | CC030VZ2R2 | |
| DC電源用電纜線 | CC02D010-3 | |
| RS-485通訊用電纜線 | CC001-RS4 | |
| 軸4 | 小型電動缸 | DR28T1A03-AZAKD-F |
|
|
驅動器 (內藏定位功能型) |
AZD-KD |
| 可動連接用電纜線 | CC030VZ2R2 | |
| DC電源用電纜線 | CC02D010-3 | |
| RS-485通訊用電纜線 | CC001-RS4 | |
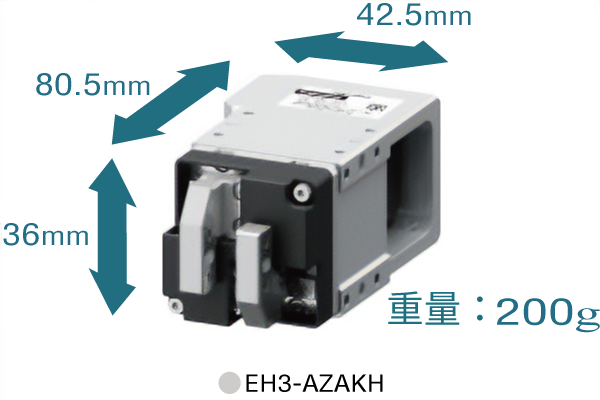
| 軸5 | 電動夾爪 | EH3-AZAKH |
|
|
驅動器 (內藏定位功能型) |
AZD-KD |
| 可動連接用電纜線 | CC030VZ2R2 | |
| DC電源用電纜線 | CC02D010-3 | |
| 制御 | 機器人控制器 | MRC01 |

|
DC電源用電纜線 | CC02D010-3 |
| RS-485通訊用電纜線 | CC001-RS4 | |






- EtherNet/IP™為ODVA的商標。
- 馬達電纜線的長度皆為3m。
- DC電源電纜線的長度皆為1m。
- RS-485通訊用電纜線的長度皆為0.1m。
控制部(機器人控制器)

控制部
MRC01

機器人控制器 MRC01
將自製機器人簡易導入至現有系統
與MRC01上位系統的連接由EtherNet/IP™直接控制。不須大幅變更現有設備的控制系統即可簡易新增導入自製機器人。
- EtherNet/IP™為ODVA的商標。
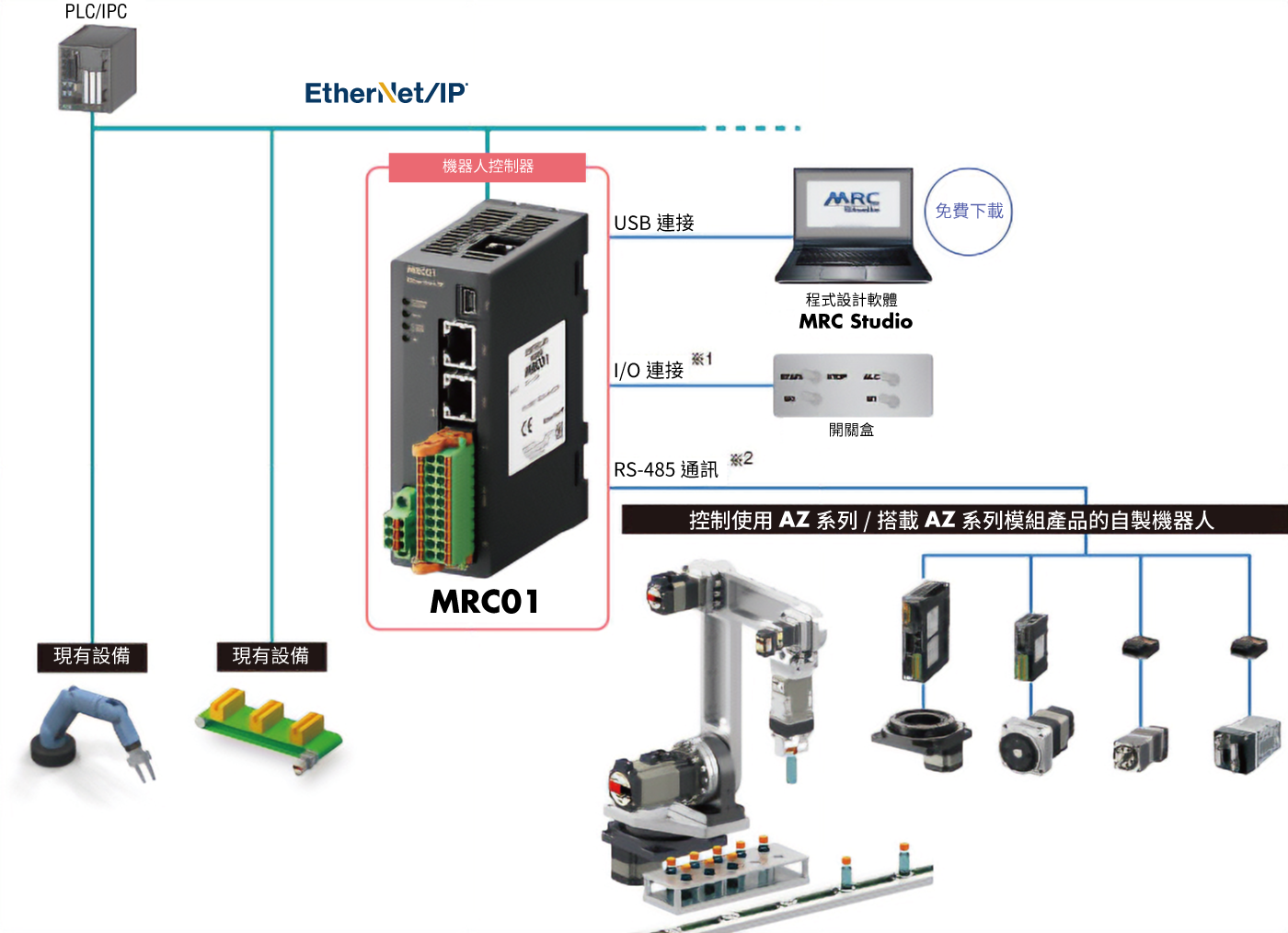
- ※1
- MRC01即使連接I/O(無上位機器)亦可操控。
- ※2
- MRC01與AZ系列的驅動器間以RS-485通訊控制。
無經驗也能簡單設定
MRC01即使不具備程式語言等專業知識,亦可輕鬆進行初期設定到運轉程式等設定。以設定精靈的形式輕易執行一連串的初期設定,包括選擇機器人類型和輸入機構資訊等等。可以一邊以示教操作使自製機器人運轉,一邊新增想新增的命令至運轉程式當中。
因為只需1個命令即可進行複數軸的設定,所以本公司的年輕裝備設計師實際上在第一次使用時,僅花費約2小時的時間即透過示教完成了程式編輯。
- 程式設計軟體 MRC Studio、EDS檔案可由此下載。

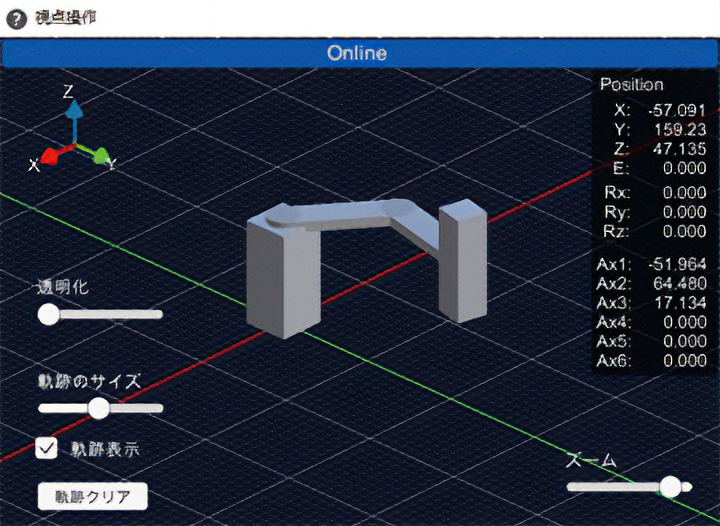
可以用線上3D模擬進行動作確認
可於3D模擬器上確認自製機器人的運轉程式,無須驅動馬達。無須連接上位PLC即可模擬。
可防止「反方向運轉」或「運轉過度導致機器人損壞」等意外發生。
- 無法離線使用。
亦可控制末端軸
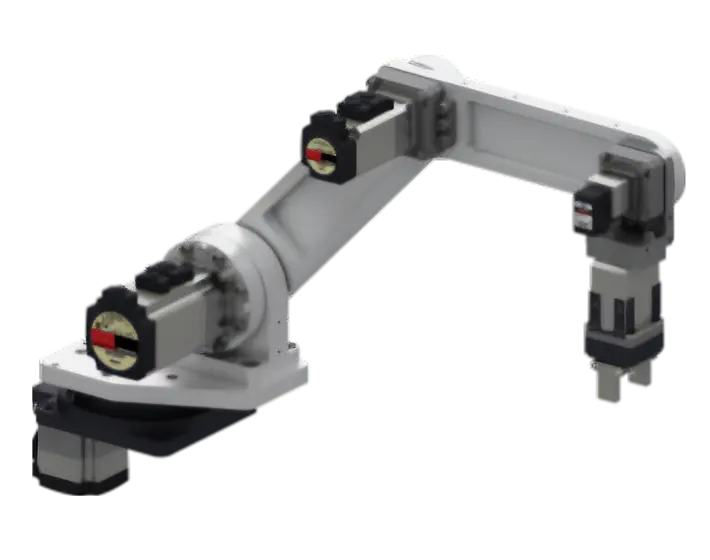
可支援垂直多關節機器人、SCARA機器人以及直交機器人等具代表性的工業機器人構造。
MRC01亦可控制末端軸,有助於降低整體系統成本及節省空間、節省配線。
-
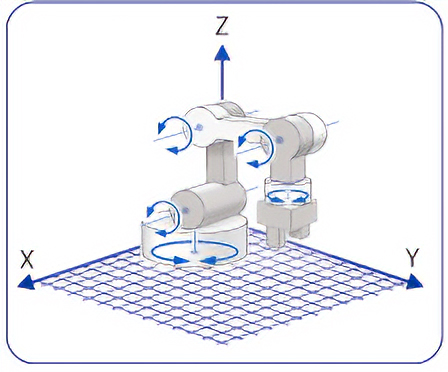
關節型機器人 -
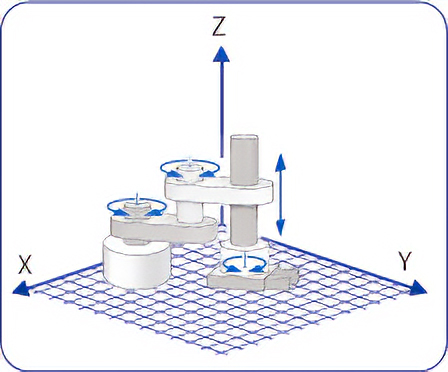
水平關節型機器人 -
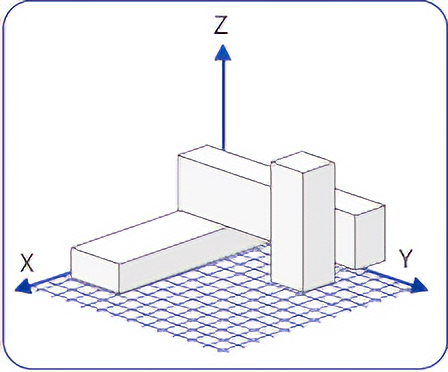
卡氏坐標型機器人
支援豐富的產品種類
可支援AZ系列,以及搭載該馬達的電動模組產品。產品種類豐富,有助於依據欲自製的機器人種類,進行高自由化的機器人設計。
AZ系列驅動器
內藏定位功能型
-

單相100-120V、
單相/三相200-240V -

DC24/48V
mini驅動器RS-485通訊型

AZ系列馬達、搭載AZ系列電動模組產品
-

馬達 -

中空旋轉平台
DGⅡ系列 -

小型電動缸
DR系列
DRS2系列
-

電動滑台
EZS系列
EAS系列
EZSH系列 -

電動缸
EAC系列 -

齒條·齒輪系統
L系列 -

電動夾爪
EH系列
搭載產品

機器人控制器 MRC01
此為只要「初期設定」「動作程式編輯」「動作確認」3個步驟,即可輕鬆導入、控制自製機器人的機器人控制器。可連接AZ系列或搭載AZ系列的電動模組產品。
關節軸、末端軸
關節軸、末端軸
AZ系列搭載產品

αSTEP AZ系列搭載產品
使用機械式多圈數絕對式編碼器,減少外部檢知器且無需電池
αSTEP AZ系列可省去原點等外部檢知器,有助於節省配線,讓機構更為輕巧。由於使用機械式多旋轉絕對式檢知器〈ABZO〉,定位運轉中即使因為緊急停止或停電而造成電源切斷,仍可保持位置資訊。因機械式無需電池即可保持資料,因此也不必花成本購買電池,擔心運用上遇到問題或需定期維修。此外,AZ系列的馬達本身可以取代檢知器監視機器人的狀態。

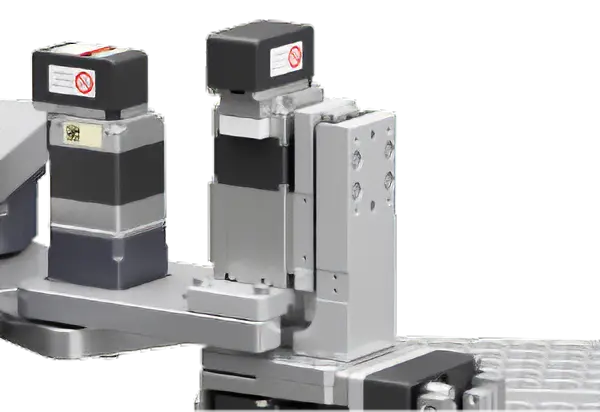
最適合用於關節軸 中空旋轉平台與小型減速機型
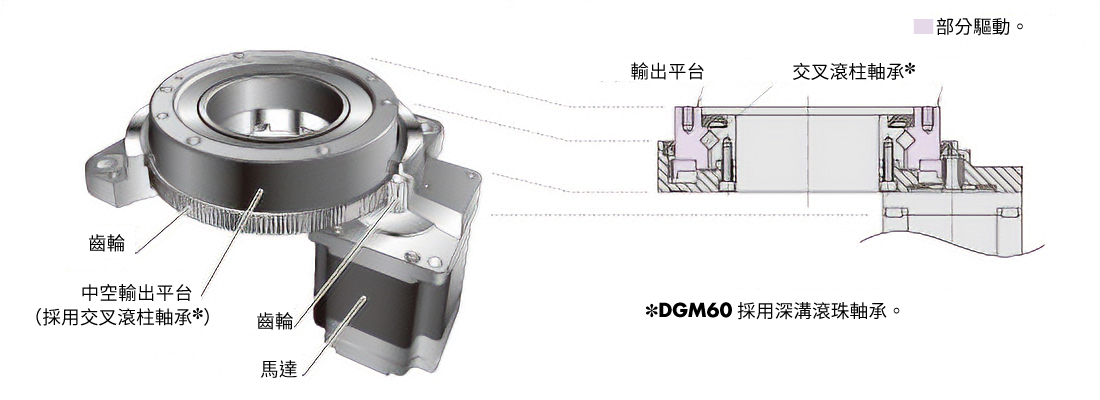
中空旋轉平台 DGⅡ系列(軸1、軸2)
SCARA機器人抓取遠離軸1機械手臂前端的工作物時,會產生較大的負載慣量。
DGII系列中空輸出平台採用Cross Roller軸承,實現了高容許慣量。藉此有助於擴大機械手臂的可動範圍。
此外,中空孔(貫穿)可用於活動空間複雜的電纜線配線,簡化設備設計。


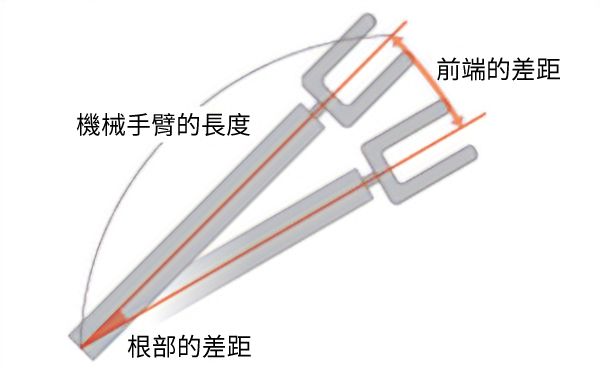
αSTEP AZ系列 諧和式減速機型(軸3)
即使是極小的差距,但在機械手臂前端會被放大,有時可能無法正確抓取工作物。由於諧和式減速機型為無齒隙,可抑制差距、實現正確的動作。
減低機器人機構前端負載的小型、輕量模組產品
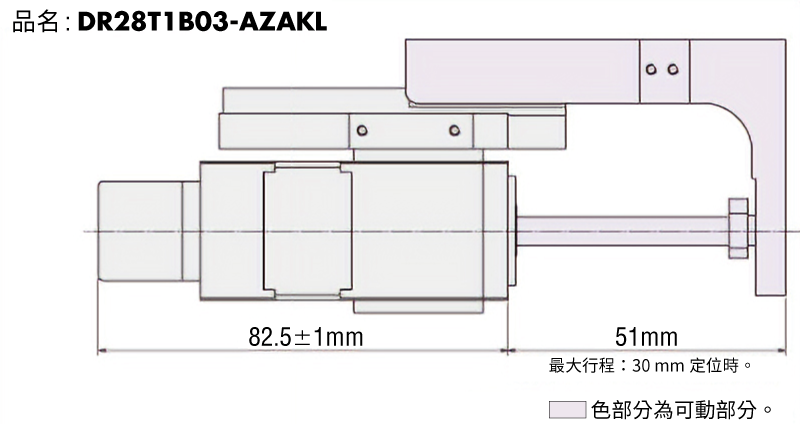
小型電動缸 DR系列 (軸4)
αSTEP AZ系列與滾珠螺桿一體化的輕巧本體,有助於使設備的體積縮小、節省空間。由於設備前端輕量化,可望提高設計的自由度。
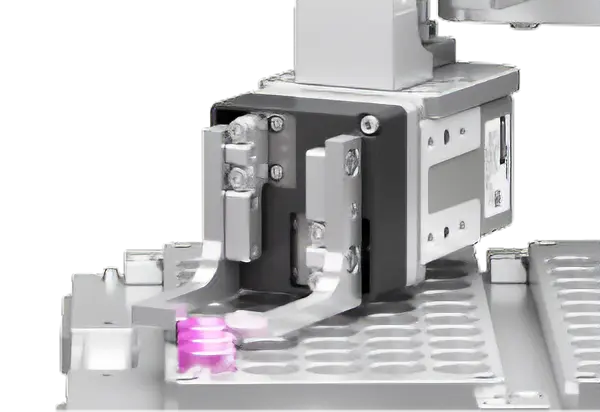
電動夾爪 EH系列 (軸5)
末端軸若變得小型、輕量,就可減輕各關節的負擔,有助於機器人整體的小型化並降低成本。
如使用電動夾爪,亦可任意調整位置/夾持時間/夾持力等設定。可以實現各種夾持動作。
搭載產品


αSTEP 搭載絕對式編碼器 AZ系列
αSTEP採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。無需電池即可實現絕對式系統。亦備齊了支援網路的驅動器,以實惠價格實現先進的定位。

小型電動缸
DR系列
將αSTEP與滾珠螺桿一體化。安裝尺寸20mm、28mm的小型尺寸,但實現高精度定位。備有種類和附加功能豐富的機構種類。搭載ABZO編碼器,有助於節省空間、節省配線。

從產品選用階段開始支援設備設計
支援馬達選用
由專責工作人員協助客戶選用馬達。
請下載選用委託表並填寫必要事項後,以諮詢表單※或傳真至客戶諮詢中心進行委託。
亦支援以現有的機構概略圖、示意圖及CAD資料等的委託。
- ※ 需要註冊會員及登入。
-
< 垂直多關節機器人 > -
< SCARA機器人 > -

< 並聯式機器人 >