
電動夾爪
EH系列
實現如人類手指般細緻的「抓取」動作。
驅動馬達採用內藏絕對式編碼器(無需電池)的αSTEP AZ系列。
2022.11.8
新增3爪型。
搭載αSTEP的特徵
αSTEP是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的優點。
由於搭載相同系列的馬達,設備起動時的驅動和維修方法也共用。
資料設定軟體也可共用。
此外,由於馬達與驅動器的維修備品共用,庫存管理變得簡單。
搭載AZ系列
| αSTEP | 電動模組產品 | |||||
|---|---|---|---|---|---|---|
| 電動滑台 | 電動缸 | 小型電動缸 | 齒條·齒輪系統 | 電動夾爪 | 中空旋轉平台 | |
| ・AZ系列 |
・EAS系列 ・EZS系列 ・EZSH系列 |
・EAC系列 |
・DR系列 ・DRS2系列 |
・L系列 | ・EH系列 | ・DGII系列 |
● 搭載的馬達電源輸入因系列而異。詳細的產品種類請至各系列的刊載頁確認。
由於搭載αSTEP AZ系列的馬達,與AZ系列相同,無需電池即可建構絕對式系統,有助於在緊急狀況下,維持位置資訊並減少外部檢知器。
本公司開發出小型.低成本、無需電池的機械式絕對式編碼器(已取得專利)。可提高生產力並降低成本。
絕對式編碼器
類比時鐘是依秒針、長針、短針位置指示目前時間。ABZO編碼器為絕對式編碼器,搭載複數個相當於時鐘指針的齒輪。由於是透過辨識個別齒輪角度來檢知位置資訊,因此無需電池。
多圈數絕對式編碼器
可從標準的原點,以馬達軸檢知±900運轉(1800運轉量)的絕對位置。
※安裝尺寸20mm、28mm(30mm)為±450運轉(900運轉量)。
原點的設定方法
只要按壓驅動器前方的開關,就能輕鬆設定原點。原點位置儲存在ABZO編碼器。不只手動開關,亦可從資料設定軟體MEXE02或外部輸入信號進行原點設定。
由於為絕對式系統,不需要原點檢知器、極限檢知器等外部檢知器。
原點復歸精度提升
由於是ABZO編碼器,進行原點復歸時,不必擔心原點檢知器的不穩定,因此可提高原點精度。原點復歸精度與反覆定位精度相同。
※未安裝極限檢知器時,若使用驅動器的軟體極限,即可防止超過界限值的動作。
降低成本
由於是ABZO編碼器,不須花費外部檢知器及配線相關費用。可減低整體系統的成本。
提高設備的設計自由度
由於是ABZO編碼器,可節省設置外部檢知器或配線所需空間。提升設備設計的自由度。
不受到外部檢知器錯誤動作的影響
由於使用ABZO編碼器,不會發生金屬加工中,因金屬片飛舞或油塵飛舞的環境下等,而發生外部檢知器錯誤動作或故障、斷線等問題。不只設定原點位置,也可設定軟體極限。防止超過界限值的動作。
高速原點復歸
由於是ABZO編碼器,沒有原點檢知器也能原點復歸。無須在意檢知器靈敏度,實現高速原點復歸並縮短生產週期。
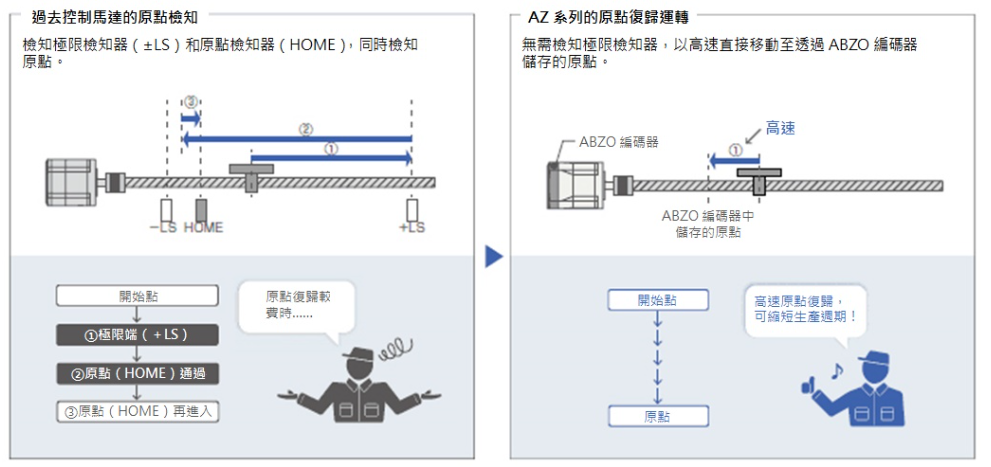
比較有無外部檢知器時的原點復歸運轉動作
通常的原點檢知
一面感知極限檢知器或原點檢知器,一面低速檢知原點,因此原點復歸費時。
搭載AZ系列的原點復歸
不必感知極限檢知器和原點檢知器,即可以高速直接移動至透過ABZO編碼器記憶的原點。
ABZO編碼器是不需要電池的絕對式編碼器。以機械方式管理位置資訊。
保持位置資訊
定位運轉中阻隔電源或拆下馬達/驅動器間的電纜線,仍可保持位置資訊。若為內藏定位功能型,則在生產線上的緊急停止時或停電之後的復原時,即使未進行原點復歸,仍可繼續定位運轉。
• 由於位置資訊儲存於ABZO編碼器(馬達側),若更換馬達時,需要重新設定原點。
在下列情況下相當有效。
• 管理複數軸,建立原點復歸程序有困難時
• 由於不易排除作業中的工作物,希望繼續進行動作時
• 希望消除原點復歸時間時
減少維修作業
由於是ABZO編碼器,因此無需更換電池。刪減維修時間及成本。
提高驅動器設置的自由度
由於是ABZO編碼器,可節省設置電池或配線所需空間。沒有驅動器設置場所的限制,提高電控箱等的配置設計自由度。
海外運送也令人安心
由於電池會自行放電,因此海外出貨等長時間的搬運設備時需要特別注意。由於是ABZO編碼器,在位置資訊保持上沒有期限。此外,將電池出口至海外時,也不必考量各種管制等。



