
電動模組產品
電動夾爪
電動夾爪
EH系列
實現如人類手指般細緻的「抓取」動作。
驅動馬達採用內藏絕對式編碼器(無需電池)的αSTEP AZ系列。
2爪
3爪
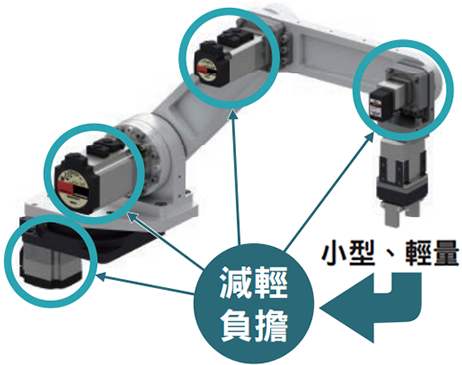
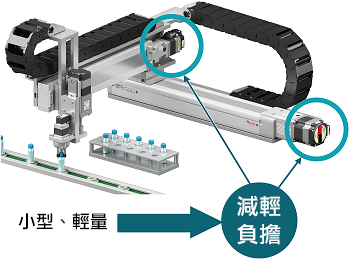
小型、輕量
DC輸入
抓取
排列
測量
2022.11.8
新增3爪型。
特徵
用途例、方便的使用方法
用途例
減輕各關節的負擔,有助於機器人整體的小型化並降低成本
末端軸若變得小型、輕量,就可減輕各關節的負擔,有助於機器人整體的小型化並降低成本。
| EH3-AZAKH | EH4-AZAKH | EH4T-AZAKH |
|---|---|---|
 |
 |
 |
| W42.5mm×D80.5mm×H36mm | W48.5mm×D91mm×H46mm | W48.5mm×D98mm×H46mm |
| 重量:200g | 重量:380g | 重量:380g |
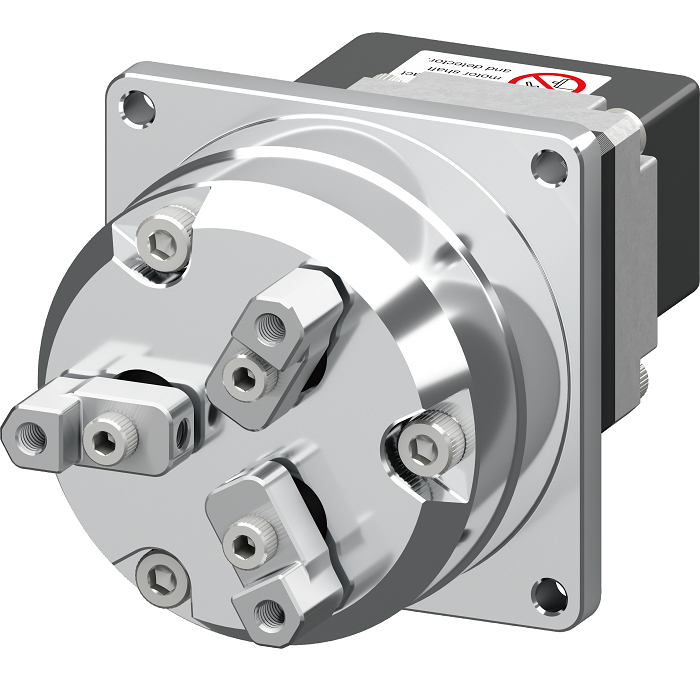
備有將EH系列安裝在市售工業機器人(協作機器人)時所需的凸緣。
包含末端軸側、機器人側的2片組。
機器人側的凸緣形狀符合ISO9409-1(JIS B 8436)。

 |
 |
 |
||
| 末端軸側 | 機器人側 |
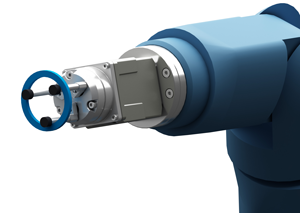
無需安裝外蓋,有助於提高設計的自由度及輕量化
備有可安裝凸緣的產品種類,可彈性安裝於客戶設計的直交軸機器人前端等。
| EH4T-AZAK |
|---|
 |
| W47mm×D90.5mm×H46mm |
| 重量:280g |
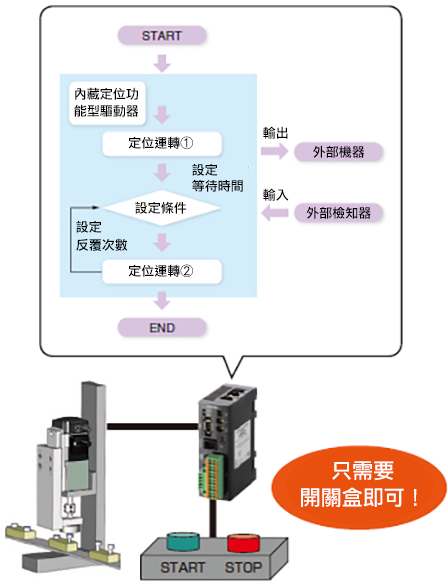
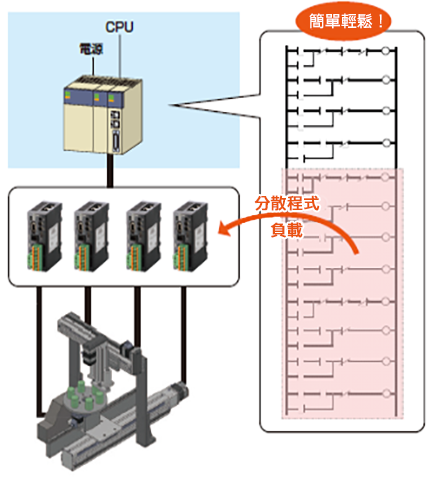
利用簡易編程功能簡化程式
可匯入控制其他機器的輸出信號以及檢知器等的外部輸入信號,以簡化程序控制的程式。
各種運轉模式及輸出入信號(對象為內藏定位功能型的驅動器等。)
可將運轉資料設定在驅動器中,從上位選擇並執行運轉資料。
此外可結合運轉資料,以內外信號的ON、OFF為契機,移到不同的運轉資料。
運轉模式
| 定位SD運轉 | 定位推壓SD運轉 | 形狀連結運轉 |
|---|---|---|
 |
 |
 |
| 將馬達的運轉速度或位置(移動量)等設定在運轉資料中,而從現在位置朝向目標位置進行梯形驅動。 | 將馬達的運轉速度或位置(移動量)等設定在運轉資料中,而從現在位置朝向目標位置進行自起動運轉。若將TLC輸出當作推壓運轉的完成信號使用,可判斷運轉中是否與負載發生推壓。 | 不停止運轉,開始執行「下一連結資料」所設定的運轉資料。 |
輸出信號
| MAREA輸出 | AREA輸出 |
|---|---|
 |
 |
| 馬達位於設定的區域內時,MAREA輸出變成ON。可設定信號輸出範圍的標準、OFFSET量、寬度。 | 馬達位於依據運轉資料設定的區域內時,AREA輸出變成ON。詳細設定請確認使用說明書的「AREA範圍指定方法」。 |
| 配置 | 信號名稱 | 功能 | |
|---|---|---|---|
| 輸入信號 | 1 | FREE | 阻隔馬達的電流使其無激磁。附電磁剎車時,解除電磁剎車。 |
| 2 | C-ON | 將馬達激磁。 | |
| 21 | T-MODE | 將過負載的Alarm設成無效。 | |
| 22 | CRNT-LMT | 進行電流限制。 | |
| 23 | SPD-LMT | 進行速度限制。 | |
| 33 | SSTART | 執行資料儲存運轉。手動連結運轉時,執行下一連結資料的運轉。 | |
| 40~47 | D-SEL0~D-SEL7 | 執行直接定位運轉。 | |
| 輸出信號 | 134 | MOVE | 馬達正在動作時輸出。 |
| 138 | IN-POS | 定位運轉完成時輸出。 | |
| 140 | TLC | 輸出轉矩達到上限值時輸出。 | |
| 141 | VA | 運轉速度達到目標速度時輸出。 | |
| 144 | HOME-END | 高速原點復歸運轉或原點復歸運轉結束時,及執行位置預設時輸出。 | |
| 159 | MAREA | 馬達位於運轉資料中所設的區域內時輸出。 | |
| 160~167 | AREA0~AREA7 | 馬達位於區域內時輸出。 |



