
New Motion 92

電動夾爪EH系列可使用於機器人自製化或市售工業機器人。最適合用於「抓取」「排列」「測量」工作物。為了能更方便使用,依據客戶要求,產品種類增加了3爪型。
了解更多


電動夾爪EH系列的特徵
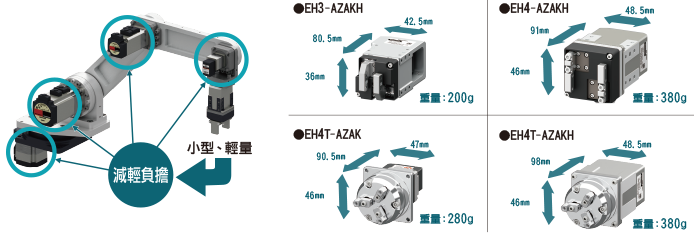
便於機器人使用,小型、輕量的夾爪
與氣動夾爪同等的小型、輕量設計,對機器人的負擔降到最低限度。末端軸若變得輕量,就可減輕各關節的負擔,有助於機器人整體的小型化並降低成本。
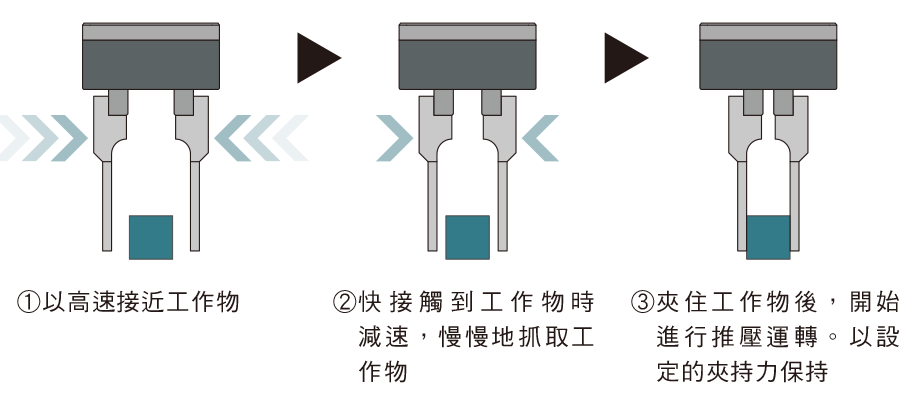
實現如人類手指般細緻的抓取動作
能以1%為單位設定夾持力。時而「柔和輕取」,時而「確實緊握」。可配合抓取的物體,自由變更或調整夾持力、夾持時間、速度。
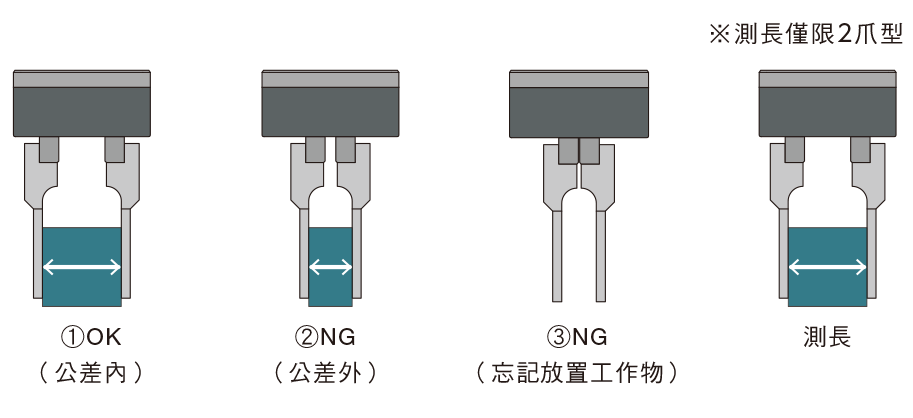
使用檢知器確認有無工作物、測長※
EH系列驅動馬達採用搭載機械式絕對式編碼器的 AZ ![]() 系列。能隨時掌握馬達的現在位置,不需外部檢知器,可由夾爪的位置資訊判定有無工作物或工作物尺寸。
系列。能隨時掌握馬達的現在位置,不需外部檢知器,可由夾爪的位置資訊判定有無工作物或工作物尺寸。
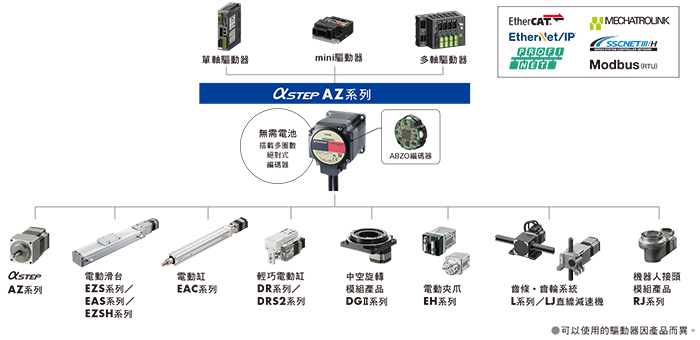
搭載AZ系列以便統一配線、控制方法、維修備品
EH系列的驅動馬達為![]() AZ系列。透過將同一設備內使用的馬達/模組產品統一為AZ系列,有許多優點,例如統一配線、控制方法及維修備品(驅動器、電纜線)等。
AZ系列。透過將同一設備內使用的馬達/模組產品統一為AZ系列,有許多優點,例如統一配線、控制方法及維修備品(驅動器、電纜線)等。
新登場3爪型的功能
3爪型可於各爪運轉時開關,以內接或外接夾持工作物。由於以3爪夾持,工作物的姿勢較為安定。
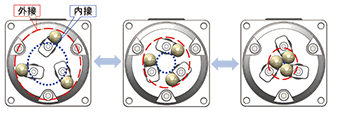

除了搭載AZ系列的EH系列特有的柔和「抓取」之外,透過減速機構造的運轉動作, 能以3點安定夾持圓筒形或球形工作物。配合用途或工作物選擇3爪型和3爪型。
| 種類 | 2爪 | 3爪 |
|---|---|---|
| 適合夾持的 工作物形狀 |
方形 |
圓筒形、複雜的形狀、球形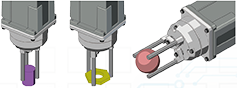 |
能對應這樣的困擾
希望維持夾持工作物穩定並
變更姿勢
變更姿勢

無法有效夾取球形工作物
搬運時會掉落
搬運時會掉落

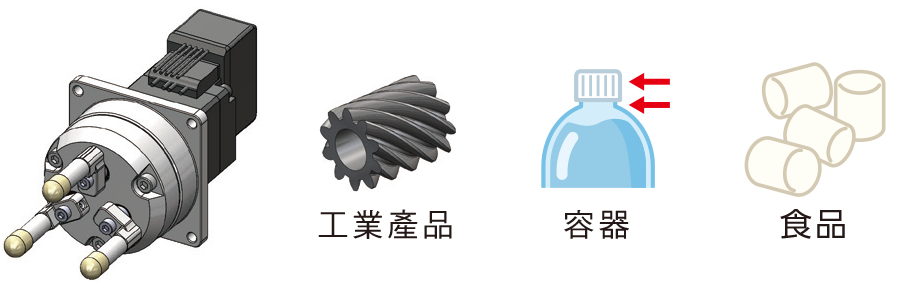
由於採取3點夾持,能穩定夾持圓筒形或球形工作物。
也可以抓取其他複雜形狀或柔軟的工作物。
想抓取搬運後
停止位置發生誤差的工作物
停止位置發生誤差的工作物

由於夾爪朝向中心閉合,即使工作物位置偏離夾爪中心,夾持時也能使其置中。可對應的工作物停止位置誤差範圍變得更寬廣。
產品種類
電動夾爪
| 2爪型 | 3爪型 | ||
|---|---|---|---|
|
EH3-AZAKH
附安裝外蓋
 |
EH4-AZAKH
附安裝外蓋
 |
EH4T-AZAKH
附安裝外蓋
 背面有PIN孔開孔
|
EH4T-AZAK
無安裝外蓋
 |
3爪型可以選擇
有無安裝外蓋!
有無安裝外蓋!
- 附安裝外蓋
建議使用定位用PIN 孔安裝或使用機器人用安裝凸緣安裝的客戶選用 - 無安裝外蓋
建議希望盡可能輕量化或自行安裝設計的客戶選用
驅動器(DC電源輸入)
|
內藏定位功能型
定位資料設定於驅動器(256點)。
使用網路轉換器(另售) ,可FA網路控制。  |
RS-485通訊附
脈波列輸入型 可藉由RS-485通訊監視馬達位置、速度、轉矩、Alarm、溫度。
 |
脈波列輸入
由定位模組(脈波產生器)控制馬達。
 |
網路對應
透過FA網路,可由上位控制機器直接控制驅動器。
 |
mini驅動器
支援網路的驅動器,與箱型驅動器相比體積更小、重量更輕。亦支援電池電源。
 |
電動夾爪EH系列的詳細規格請參閱此處。
相關產品



