混合式控制系統αSTEP
混合式控制系統αSTEP
控制方式的概要
內藏轉子位置檢知檢知器
於馬達的反出力軸側內藏有轉子位置檢知檢知器。

利用檢知器線圈檢知出轉子運轉位置所產生的磁氣電阻的變化。
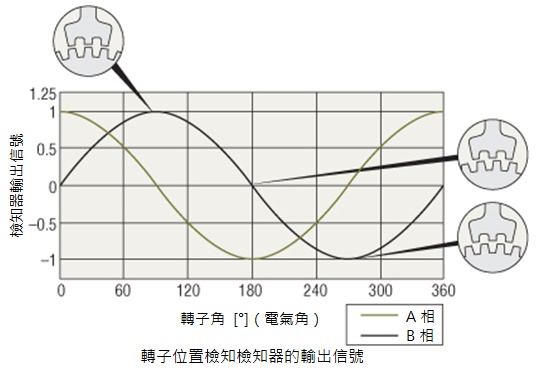
轉子位置檢知檢知器的輸出信號
採用本公司獨創的閉回路控制系統。
透過偏差計數器的計算可得知,脈波信號的指令位置與實際的轉子運轉位置的偏差量(延遲/過轉)。
透過偏差計數器的計算結果判斷是否進入「過負載領域」,以控制切換開回路模式/閉回路模式。
● 通常是以開回路模式運轉。
● 過負載時則以閉回路模式運轉。
αSTEP的控制程序構成圖
於閉回路模式下控制馬達線圈的激磁狀態,令其對於轉子運轉位置產生瞬間最大轉矩。
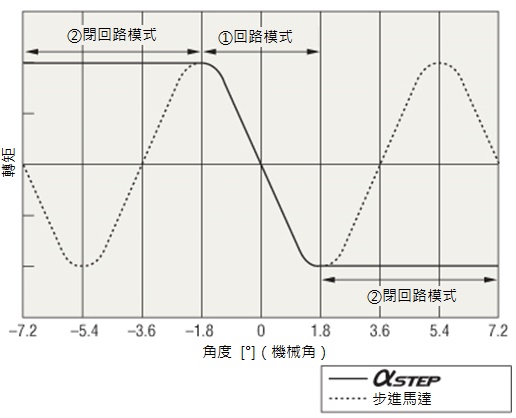
採用此種控制方式,於角度―轉矩特性上沒有所謂的不安定點(過負載領域)。
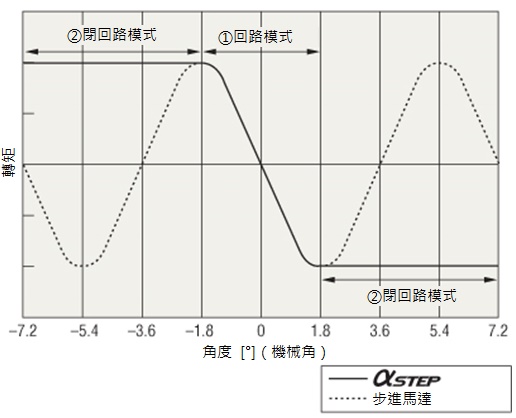
角度―轉矩特性
αSTEP的特徵
提升步進馬達的性能
● 高速領域的轉矩特性更容易使用
αSTEP在運轉時不需考慮一般步進馬達所需注意的以下各點。
- 限制起動脈波速度
可輕鬆進行活用運轉領域的高速運轉。
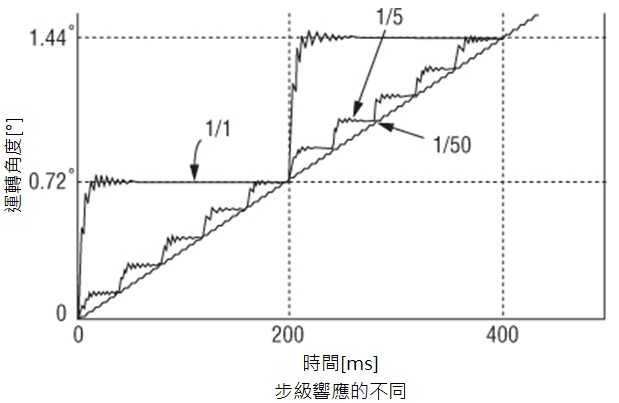
● 利用速度平滑性調整開關起動時/停止時的響應性
不需變更控制器的資料(起動脈波速度、加減速斜率)即可將起動時/停止時的響應性做16階段的調整。
此一功能主要目的是希望能減少對工作物的衝擊,以及減低低速運轉時的振動。
機械式多圈數絕對式編碼器(ABZO編碼器)
ABZO編碼器是以機械方式檢知位置,在檢知器側儲存位置。藉由將位置資訊儲存在檢知器側,可建構絕對式系統,即使在切斷電源時也能保持位置資訊。此外,與以往不同,不需使用電池來備份位置資訊,因此取下馬達電纜線也不會喪失位置。