
步進馬達的構造
步進馬達的構造
步進馬達的截面圖如下圖所示。
步進馬達構造上大致分為定子與轉子兩零件。
轉子由轉子1、轉子2、永久磁鐵等3部分構成。另外,轉子朝軸向磁化,轉子1為N極時,轉子2則為S極。
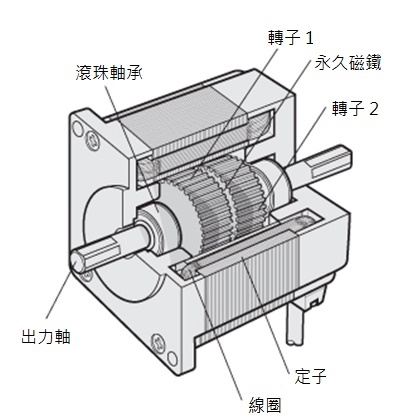
馬達構造圖:與出力軸平行方向的截面圖
定子擁有小齒狀的磁極,各自繞有線圈。
其線圈的對角位置的磁極相互連接著,電流流通後,線圈即會被磁化成同一極性。(藉由讓某一線圈流通電流,將相對的磁極磁化為相同的N極或S極。)
相對的2個磁極形成1個相。具有A相到E相等5相的類型稱為5相步進馬達,具有A相和B相共2相的類型稱為2相步進馬達。
轉子的外圈由50個小齒構成,轉子1和轉子2的小齒於構造上相互偏差1/2螺距。
激磁:馬達線圈通電流時的狀態
磁極:經由激磁而電磁鐵化的定子之突出部分
小齒:轉子和定子的小齒部分
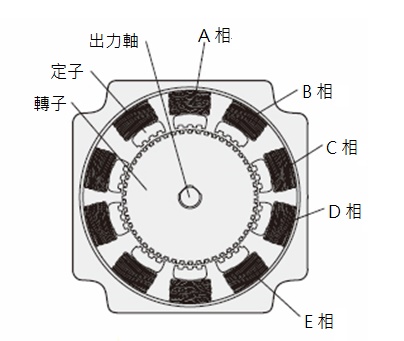
5相馬達構造圖:與出力軸垂直方向的截面圖

2相馬達構造圖:與出力軸垂直方向的截面圖


