



被賦予的課題
導入設備後達到投資效果
與傳統依靠人力作業的人事成本相比,導入自動化後必須發生因減少人力而降低生產單價的效果。因此必須盡量以低預算導入自動化設備。
模組化的生產設備
由於模組化的逐步發展,讓產線得以因應各種情形彈性調整。必須讓設備尺寸統一才能模組化。此外,還希望能將每個設備設計得更小、更輕。

模組化的生產設備事例
為了自動化決定
導入自製機器人
(部分製程)
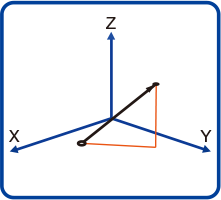
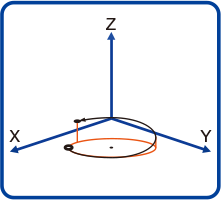
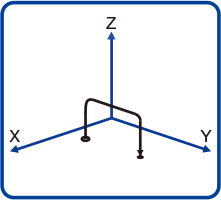
從輸送帶或垂直多關節機器人、直交機器人等多樣化的機構種類中,選擇導入水平多關節(SCARA)機器人。其原因在於希望能在有限的空間中進行搬運時能夠實施定位。

活用工業機械手臂下方有限空間
的自製SCARA機器人


透過機器人控制器
MRC01控制機器人
機器人控制經驗尚淺,編寫階梯圖又太困難。因此導入機器人控制器MRC01。使用程式設計軟體MRC Studio,能夠直覺地控制機器人。

| 可控制機器人台數 | 1台 |
|---|---|
| 最大控制軸數 | 6軸(包含末端軸) |
| 上位網路 | EtherNet/IP |
| 程式點數 | 64點(一點可以製作128個命令的程序) |
|
支援MRC01的 機器人種類 |

|
完 成
〈自製SCARA機器人的結果〉
AZ系列、中空旋轉平台DGⅡ系列、小型電動缸DR系列、電動夾爪EH系列、機器人控制器MRC01的單純小型設計,導入一個組合的構成費用能控制在30萬元以下(含電裝)。

使用2組自製SCARA機器人的設備

MRC01是只要「初期設定」、「動作程式編輯」、「動作確認」3個步驟,即可輕鬆導入、控制自製機器人的控制器。

選擇機器人種類
依照指南,在程式設計軟體MRC Studio選擇機器人的種類
設定末端軸
輸入機器人尺寸
依照顯示的插圖,輸入所使用機器人的尺寸資訊


利用項目選擇即可編輯動作程式
從命令欄選擇後,設定動作的移動量或速度。
即使不具備階梯圖等專業知識,亦可直覺性製作程式。

1 選擇命令

P to P控制
直線補間
圓弧補間
(螺旋補間)
拱形動作
疊棧
2 設定移動量、速度等

輸入及設定移動量
或速度等數值(亦
可示教)
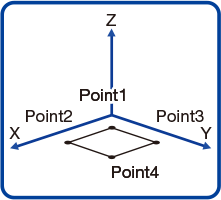
以3D模擬進行動作確認
在圖形監視器上確認程式動作。
使用測試運轉功能,圖形監視器上的機器人將依設定動作。

實際運作機器人

可與機器人控制器MRC01組合使用的
 AZ系列和搭載AZ系列的模組產品
AZ系列和搭載AZ系列的模組產品
 是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的優點。AZ系列採用本公司獨創的閉回路控制系統 ,搭載新開發的ABZO編碼器。無需電池即可實現絕對式系統。
是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的優點。AZ系列採用本公司獨創的閉回路控制系統 ,搭載新開發的ABZO編碼器。無需電池即可實現絕對式系統。



