
首頁 > Q&A > 產品相關常見問題 > ST-131 目前是將AZ系列EtherCAT對應驅動器與台灣歐姆龍PLC產品組合使用,並藉由MC命令進行控制。在軸設定時,馬達解析度(馬達運轉1圈的脈波數)應該設定為多少?此外,若要設定mm或deg,該怎麼做?
步進馬達
ST-131 目前是將AZ系列EtherCAT對應驅動器與台灣歐姆龍PLC產品組合使用,並藉由MC命令進行控制。在軸設定時,馬達解析度(馬達運轉1圈的脈波數)應該設定為多少?此外,若要設定mm或deg,該怎麼做?
對象產品
AZ系列EtherCAT驅動規範對應驅動器:
AZD-AED、AZD-CED、AZD-KED、AZD2A-KED、AZD2B-KED、AZD3A-KED、AZD4A-KED
控制方法:使用PLC的動作控制(MC命令)(操作模式CSP、CSV模式)若要使用驅動器內部Profile(操作模式PP、PV、HM模式),請參閱此處的Q&A。
A. 解析度初始值為10,000P/R。
請在台灣歐姆龍產品Sysmac Studio的軸設定中,將馬達解析度(馬達運轉1圈的脈波數)設定為10,000P/R。驅動器的解析度設定雖然可以變更,但使用MC命令時,建議使用預設的初始值。若變更解析度,振動等狀況可能會變大。
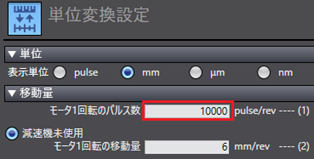
若要設定mm或deg,請將解析度的設定維持在10,000P/R,再於台灣歐姆龍產品Sysmac Studio的軸設定上設定mm或deg。
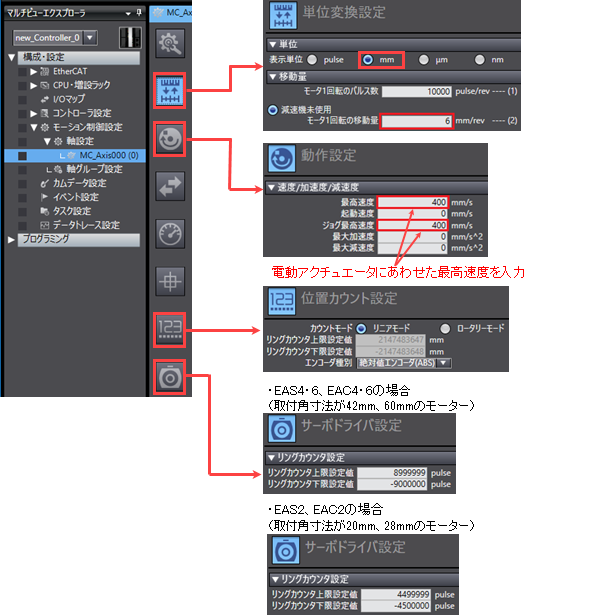
本公司電動模組產品(電動滑台、電動缸、小型電動缸)的設定範例如下。
相關的Q&A



