
步進馬達EtherCAT探針功能(Touch probe)的檢測應用
課題
晶圓傳送盒設備:晶圓放置狀態的輔助判斷
設備
晶圓傳送盒
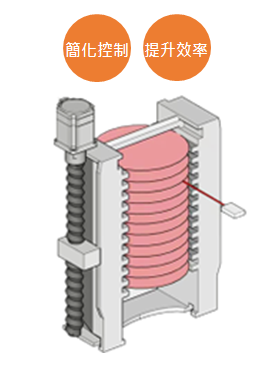
機構
螺桿機構
動作概要
透過螺桿機構使晶圓上、下移動動作,期間利用盒內的檢知器進行晶圓放置狀態的輔助判斷,以利下一工序的取料動作。
以往的問題點
以往的控制方式是從上位連接檢知器,當上位收到信號後,再向驅動器查詢目前位置,並根據查詢的位置判斷結果。
但上位讀取位置時由於信號傳送、程式回應等因素,相對於實際情況會發生延遲而且費時,無法提升效率。
以往控制示意圖:

解決對策
利用探針功能將位置鎖存後讀取,使上位更精準、高效
探針功能(Touch probe)
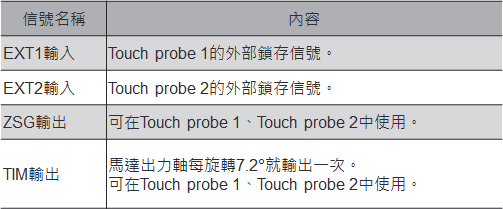
Touch probe功能是將外部鎖存輸入信號(EXT1輸入、EXT2輸入)或輸出信號(ZSG輸出、TIM輸出)作為觸發,對輸入觸發時的位置進行鎖存。
相關信號
解決對策控制示意圖:

將外部檢知器的信號直接輸入驅動器,當驅動器接收到檢知器信號上升邊緣與下降邊緣的輸出後,透過AZ系列EtherCAT通訊中的Touch probe功能對上升邊緣、下降邊緣觸發時的位置進行鎖存。
上位則依據通訊週期的處理週期,直接週期性讀取鎖存位置進行應用。
時序示意圖:
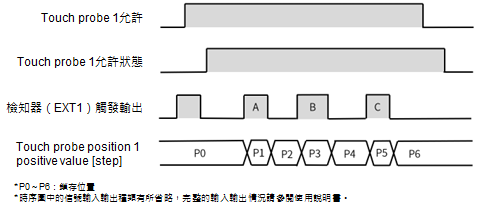
上位透過EtherCAT通訊直接讀取EXT1信號上升邊緣與下降邊緣鎖存位置資訊並以其差值乘以馬達步級角,即可得出晶圓厚度的測量情況並應用於相關生產的輔助判斷。
例如:
A的厚度=(P2-P1)*馬達最小移動量
B的厚度=(P4-P3)*馬達最小移動量
C的厚度=(P6-P5)*馬達最小移動量
A的厚度=(P2-P1)*馬達最小移動量
B的厚度=(P4-P3)*馬達最小移動量
C的厚度=(P6-P5)*馬達最小移動量
相關產品
AZ系列備有多樣化的驅動器類型,包括多軸、雙軸、單軸與mini驅動器,適用於不同的應用用途。




| 驅動器類型 | 品名 |
|---|---|
| 多軸驅動器(2軸、3軸、4軸) | AZD2A-KED、AZD3A-KED、AZD4A-KED |
| 雙軸驅動器 | AZD2B-KED |
| 單軸驅動器 | AZD-AED、AZD-CED、AZD-KED |
| mini驅動器 | AZD-KRED |


