AMR(Autonomous Mobile Robot)
課題
可以將人力減少、空間縮小,並增加定位精度嗎?
舊有裝置
- 牙叉型AMR,但仍需仰賴人工搬運測試治具(約30kg)
以往的問題點
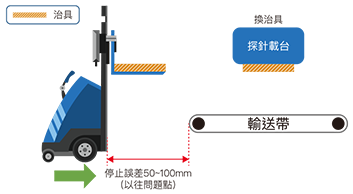
- 因馬達高低速度比不足,為符合平時運行速度,無法使用高減速比,導致AMR停止誤差較大
- AMR停止誤差50~100mm,導致更換治具時臂展過長,易有傾斜,故仍需人工搬運更換治具
- 人工搬運有工安意外風險,更換治具時,亦需透過輔助工具才能正確固定治具位置
解決對策
BLV系列R型可提升定位精度,解決以往馬達因速差不足,回授解析度不夠而導致的精度不足問題
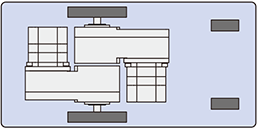
● 課題機構示意圖
▌牙叉型AMR更換治具情境
● 解決對策商品

● 採用速度控制模式,可以極低轉速(例:1RPM)微調,降低過轉量
▌提案圖表示意

● 使用高解析度編碼器,搭配傳感器測距後,亦可執行精準定位
▌提案圖表示意

延伸提案
廠區過道空間有限?
給您小型化省空間的提案

▌搭配法蘭輸出頭時

▌使用中空軸扁平式減速機時