
清洗機(皮帶)
- 為解決設備空間不足,使用無刷馬達將工作物從入料站送入清洗站
- 馬達帶動皮帶機構,工作物進入清洗站腔體後,以傳感器控制停止
- 設備必須小型化,故將電控箱設置在工作站下方,因此垂直安裝空間不足
- 希望提升一倍產能,但受限於清洗時間,因此採用雙列輸送入料,導致水平安裝空間不足
- 工作物清洗由2D轉為3D後,由於傳感器控制停止的精度不足,導致工作物上的助焊劑未完全洗淨
同時解決空間與停止精度不足的問題
AZ系列FC減速機型為直交軸設計,且馬達直驅傳動減速機的面齒輪,有效縮減長度以脈波控制可實現精準定位,精度誤差從2∼3rev 提升為0.17°∼0.42°(減速機齒隙)
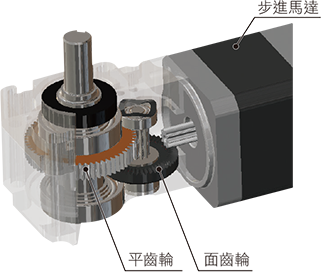
▮何謂FC減速機
所謂FC減速機型,係指與平齒輪咬合的圓盤狀齒輪:由面齒輪構成的直交軸減速機型馬達。
過去面齒輪是以大型且高輸出型為主流,但東方馬達將面齒輪加工為小型、高精度後,以實惠的價格實現了低齒隙、高強度。
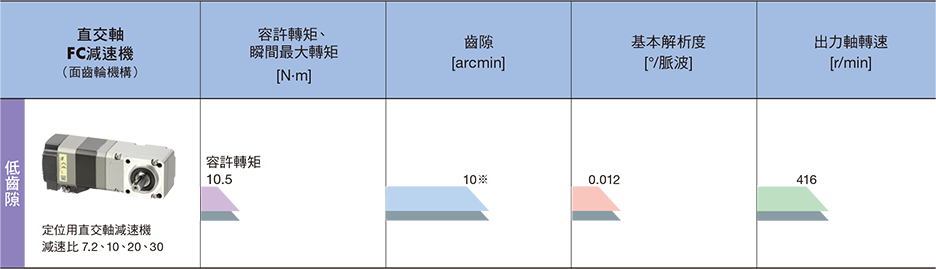
※備註:以上僅為代表規格之一,齒隙因減速機安裝面尺寸、減速比而有不同,
規格範圍10 arcmin(0.17°) ∼ 25 arcmin(0.42°),詳以官網規格資料為準。
使用Sensor回Home,如何提高回Home精度?
可使用AZ系列ABZO編碼器的絕對原點,回Home精度更佳
▮影響定位精度原因:
‧ 馬達精度
‧ 連結部精度(例:聯軸器)
‧ 機構加工精度
‧ 組裝精度
‧ Home Sensor精度
▮回Home精度實測比較:
(1)Sensor回Home時
以相同速度實測三次Sensor回Home時(不清除馬達位置),
AZ編碼器的數值分別是35678、35651、35655,最大差距為
27 pulse※
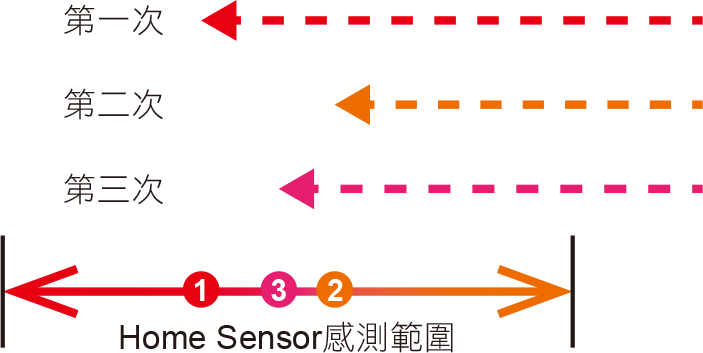
| ※ | Sensor回Home時的速度不同,所量測到的脈波差距亦會不同,因此實測值僅作為參考用。 |
(2)ABZO編碼器絕對原點
AZ設定原點,使用ZHOME直接回到設定點,不需接原點SENSOR,少了每次回HOME的位置誤差,比接SENSOR精度
更佳
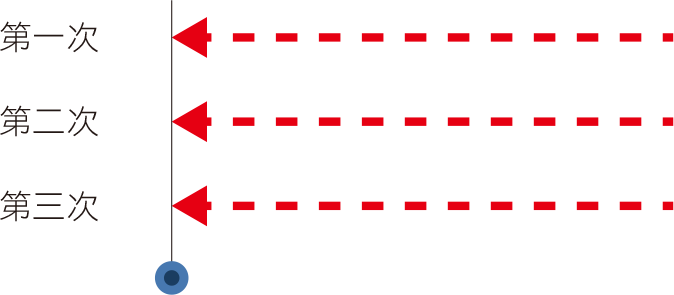
ABZO編碼器絕對原點


