
通訊問題&控制器
FL-20 如果要圓弧補間控制,但又因為工業4.0關係需要蒐集資訊有什麼方法嗎?
A:
能做到順暢的圓弧補間,
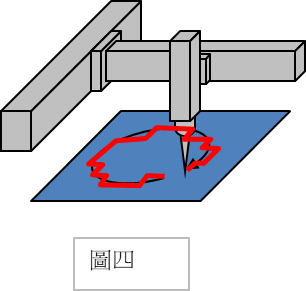
必要條件是PLC跟馬達之間的指令傳達速度要快速,順暢如圖三,不順暢如圖四:
圓弧補間-順暢 圓弧補間-不易描繪順暢的圓弧

能做到順暢的圓弧補間,
必要條件是PLC跟馬達之間的指令傳達速度要快速,順暢如圖三,不順暢如圖四:
圓弧補間-順暢 圓弧補間-不易描繪順暢的圓弧
指令傳達速度快以目前業界常見的控制種類有以下
1.脈波型控制
2.運動控制型(EtherCAT、SSCNETⅢ/H、MECHATROLINK-Ⅲ)
不過脈波型並無溫度,行走距離等資訊可做監控,無法符合工業4.0,所以不適用。
可是脈波型還是算目前主流的控制方式,如果想符合工業4.0 需要驅動器可以輸入脈波同時加入通訊控制,綜合以上,提出兩種產品提案:
1.多軸驅動器((EtherCAT、SSCNETⅢ/H、MECHATROLINK-Ⅲ)
2.AZ系列 RS-485通訊附脈波列輸入型
回分類首頁



