
新產品訊息
2024年01月19日
為您介紹東方馬達最新產品,2相/5相步進馬達 PKP系列 附編碼器
2相/5相步進馬達 PKP系列 附編碼器
特徵
可高精度檢知位置
搭載高解析度、高角度精度編碼器
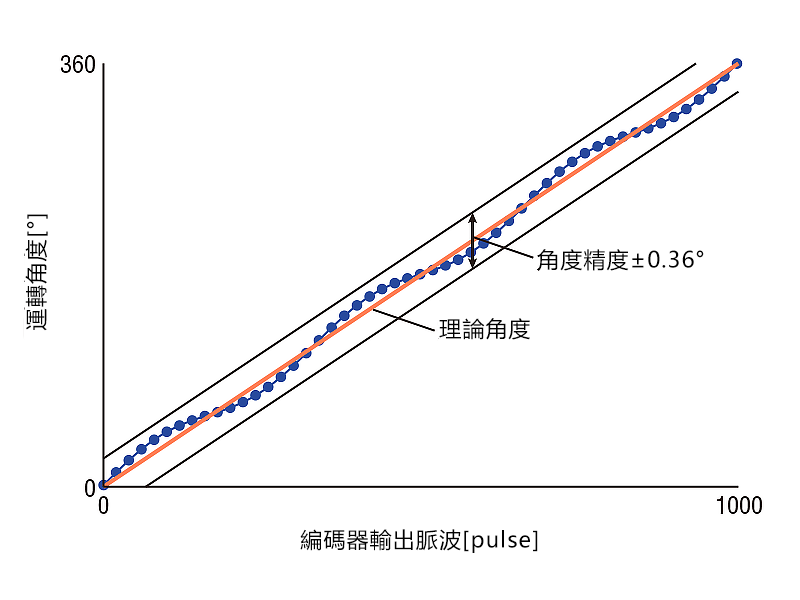
搭載高解析度的編碼器。對馬達進行檢測後的狀態下,角度精度為±0.36°(保證值)。
2相步進馬達
| 種類 | 標準型 | 高解析度型 SH減速機型 |
|---|---|---|
| 解析度 | 200P/R、400P/R※ | 400P/R |
| 角度精度 | ±0.36°(馬達出力軸的換算值) | |
| 輸出信號 | A相、B相、Z相(3ch) | |
※ 安裝尺寸42mm、56.4mm也備有解析度1000P/R的產品種類。
關於高角度精度(示意圖)
實際的運轉角度與編碼器輸出角度之間的誤差。
5相步進馬達
| 種類 | 標準型 | 高解析度型 |
|---|---|---|
| 解析度 | 500P/R※ | 1000P/R |
| 角度精度 | ±0.36°(馬達出力軸的換算值) | |
| 輸出信號 | A相、B相、Z相(3ch) | |
※ 安裝尺寸42mm、60mm也備有解析度1000P/R的產品種類。
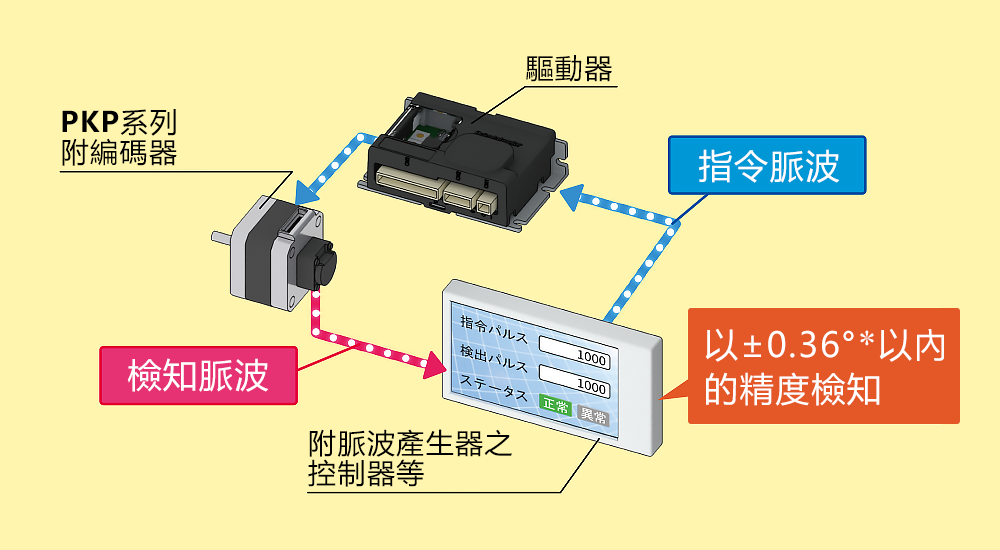
可實現更高精度的系統控制
可監視現在位置或檢知位置差距等。例如,比較現在位置與指令位置,藉此確認馬達的正常動作。
系統構成範例
※ 馬達出力軸的換算值
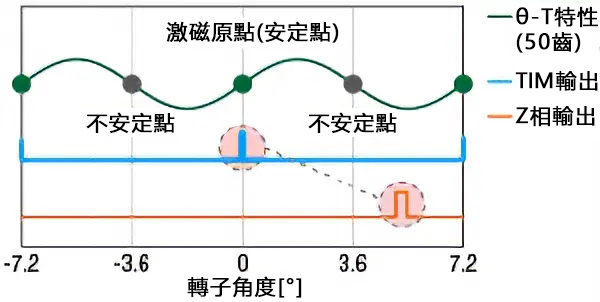
可實現重現性高的原點標出
由於在激磁原點(安定點)輸出Z相信號,可代替原點檢知器(安裝於馬達軸運轉1圈內檢知原點的檢知器)。
此外,便於併用Z相輸出信號與TIM輸出信號※,提高原點標出的重現性。
※ 馬達出力軸從原點每旋轉7.2°(高解析度型為3.6°)時從驅動器輸出的信號。
Z相輸出的時序固定時
新編碼器(磁氣式)
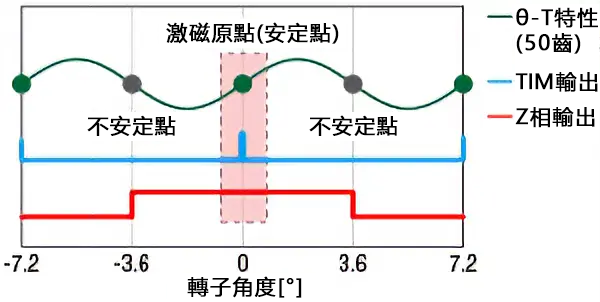
以激磁原點(安定點)為中心,於±3.6°的範圍輸出Z相信號。
Z相輸出的時序不固定時
由於Z相信號的輸出時序不固定,難以代替原點檢知器,也不容易與TIM信號併用。
可選擇電壓輸出型與Line Driver輸出型
備有電壓輸出型與Line Driver輸出型。
此外,備有便於編碼器配線的電纜線(另售)。
產品種類
2相PKP系列(雙極 4條導線)
編碼器輸出回路形式:Line Driver輸出、電壓輸出
| 種類 | 基本步級角 | 安裝尺寸 [mm] |
編碼器解析度 | ||
|---|---|---|---|---|---|
| 200P/R | 400P/R | 1000P/R | |||
| 標準型 | 1.8°/step | 20 | 〇 | 〇 | - |
| 28 | 〇 | 〇 | - | ||
| 35 | 〇 | 〇 | - | ||
| 42 | 〇 | 〇 | 〇 | ||
| 56.4 | 〇 | 〇 | 〇 | ||
| 高解析度型 | 0.9°/step | 28 | - | 〇 | - |
| 42 | - | 〇 | - | ||
| 56.4 | - | 〇 | - | ||
| SH減速機型 | 0.05~0.5°/step | 28 | - | 〇 | - |
| 42 | - | 〇 | - | ||
| 60 | - | 〇 | - | ||
5相PKP系列
編碼器輸出回路形式:Line Driver輸出、電壓輸出
| 種類 | 基本步級角 | 安裝尺寸 [mm] |
編碼器解析度 | |
|---|---|---|---|---|
| 500P/R | 1000P/R | |||
| 標準型 | 0.72°/step | 20 | 〇 | - |
| 28 | 〇 | 〇 | ||
| 42 | 〇 | - | ||
| 56.4 | 〇 | - | ||
| 60 | 〇 | - | ||
| 高解析度型 | 0.36°/step | 28 | 〇 | - |
| 42 | 〇 | 〇 | ||
| 60 | 〇 | 〇 | ||
相關產品
組合驅動器(另售)




