活用案例
不使用定位檢知器下之輸送帶高精度多點停止案例
皮帶輸送帶-3
課題
希望在減少檢知器的情形下實現多點停止
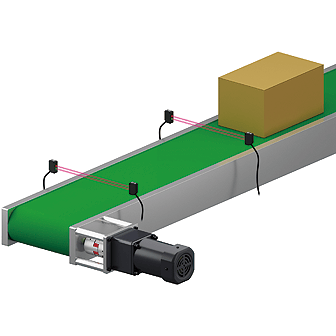
舊有設備
以三相感應馬達驅動輸送帶,並使用多個定位用檢知器進行多點停止(使用變頻器進行速度控制)
用途:工作物搬運
以往的問題點
- 檢知器或周邊零件越多,配線及維修所需的工時也會增加
- 頻繁發生斷線或錯誤動作等問題
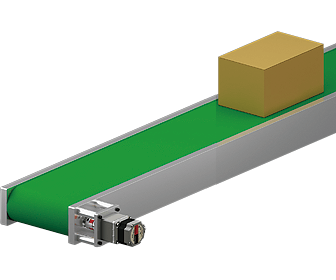
解決對策
步進馬達 RKII系列
內藏定位功能型
無需定位檢知器即可實現高精度之多點停止
內藏定位功能型
無需定位檢知器即可實現高精度之多點停止
採用步進馬達RKII系列,即可在不使用定位檢知器的情形下進行高精度的多點停止。

具體應用範例
● 無檢知器下的高精度多點停止

內藏定位功能型若事先於驅動器內設定好起動到停止位置的移動量資料,即可停在任意位置上。無須使用定位用檢知器,即使停止位置數增加也可彈性應對。
起動、停止響應性佳,不會過轉。即使重複進行定位,停止位置也不會有誤差產生,使重現性提升。
此外,通電狀態下會產生自我保持力,能保持在停止位置。
● 使用專用軟體可輕鬆設定、驅動多點停止
最多可連結4筆不同移動量或不同速度的資料,單次START輸入即可完成驅動。
使用資料設定軟體MEXE02,即可輕鬆地在電腦上完成運轉資料設定。

【連結運轉的設定範例】
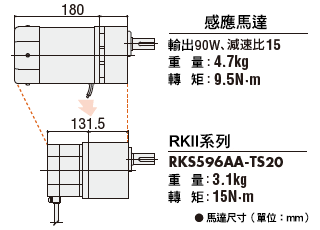
● 馬達體積縮小、重量減輕
與感應馬達相比,體積更小,有利於縮小設備體積並減輕整體重量。
【感應馬達輸出90W型與RKII系列減速機型同等品的比較】