
活用案例
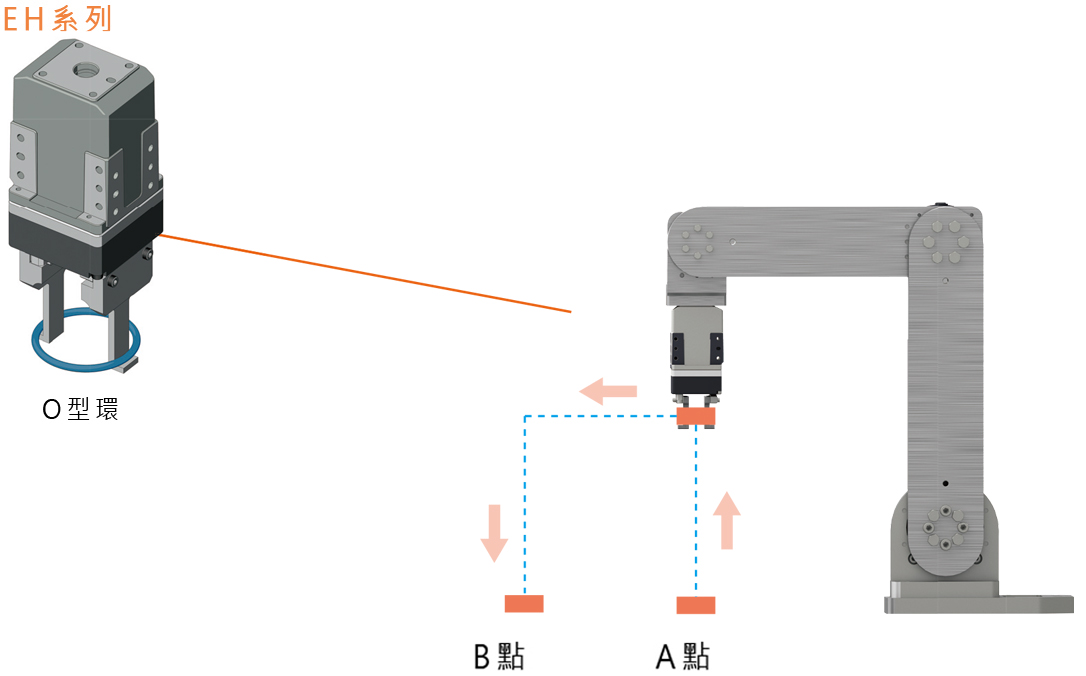
夾具-想抓取中空的工作物
課題
想實現夾持內徑工作物
以往的問題點
- 想夾持搬運中空的工作物。
- 想編製一連串程序,在A點夾持工作物後放置在B點。
解決對策
完成A點到B點的移動動作後,放開工作物
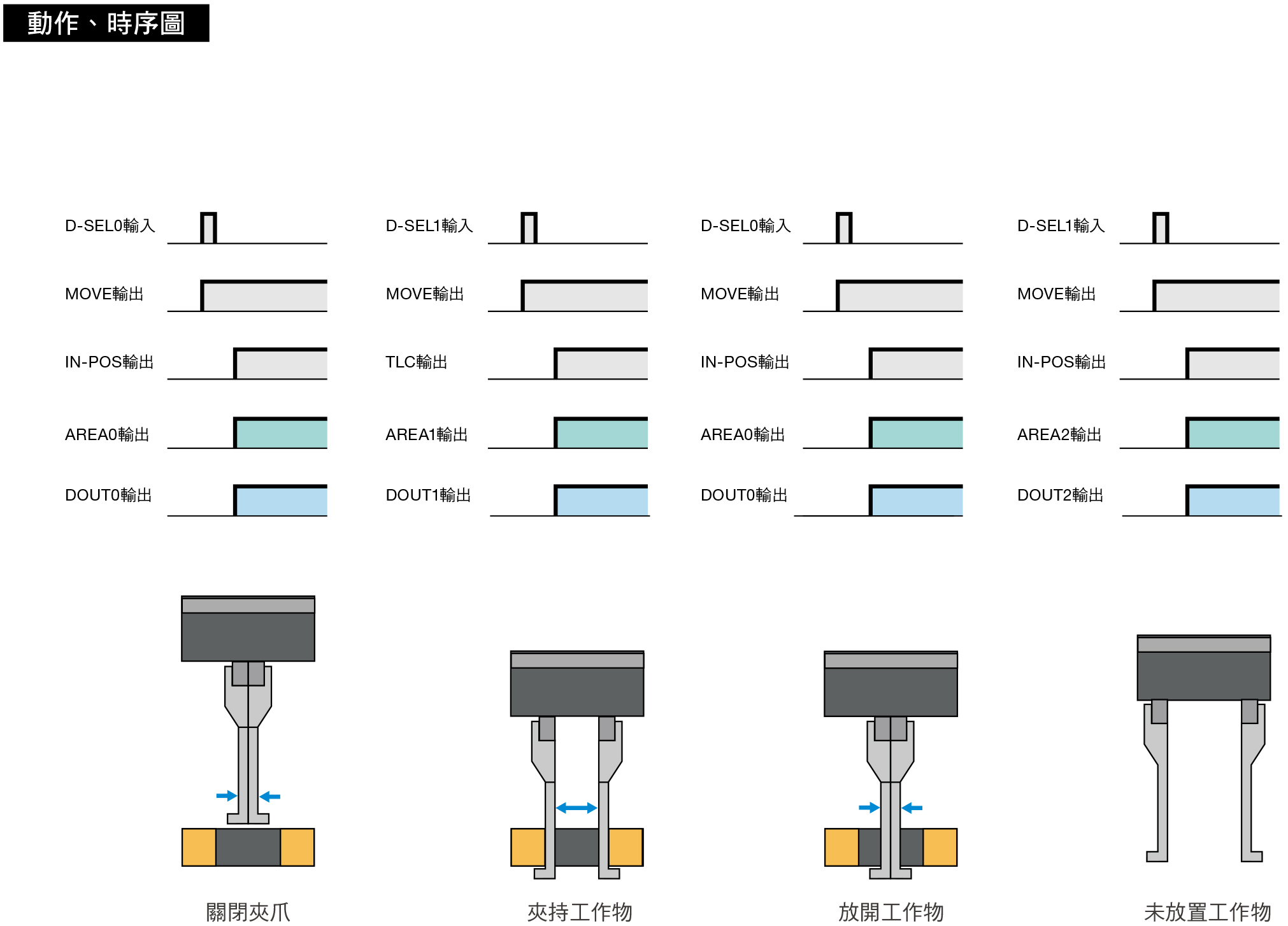
解決方法關鍵字 複合輸出功能
複合輸出功能是將2個輸出信號的邏輯結合結果以1個信號輸出。
在本例中,會將以下的信號結合輸出。
| 狀態 | 輸出信號 | ||
|---|---|---|---|
| 夾爪關閉 | DOUT 0 | IN-POS | 運轉完成時輸出的信號 |
| AREA0 | 馬達位於設定的區域內時輸出的信號 | ||
| 夾持工作物中 | DOUT 1 | TLC | 推壓時輸出的信號 |
| AREA1 | 馬達位於設定的區域內時輸出的信號 | ||
| 放開工作物 | DOUT 0 | IN-POS | 運轉完成時輸出的信號 |
| AREA0 | 馬達位於設定的區域內時輸出的信號 | ||
| 未放置工作物 | DOUT 2 | IN-POS | 運轉完成時輸出的信號 |
| AREA2 | 馬達位於設定的區域內時輸出的信號 | ||
資料設定軟體MEXE02的設定範例
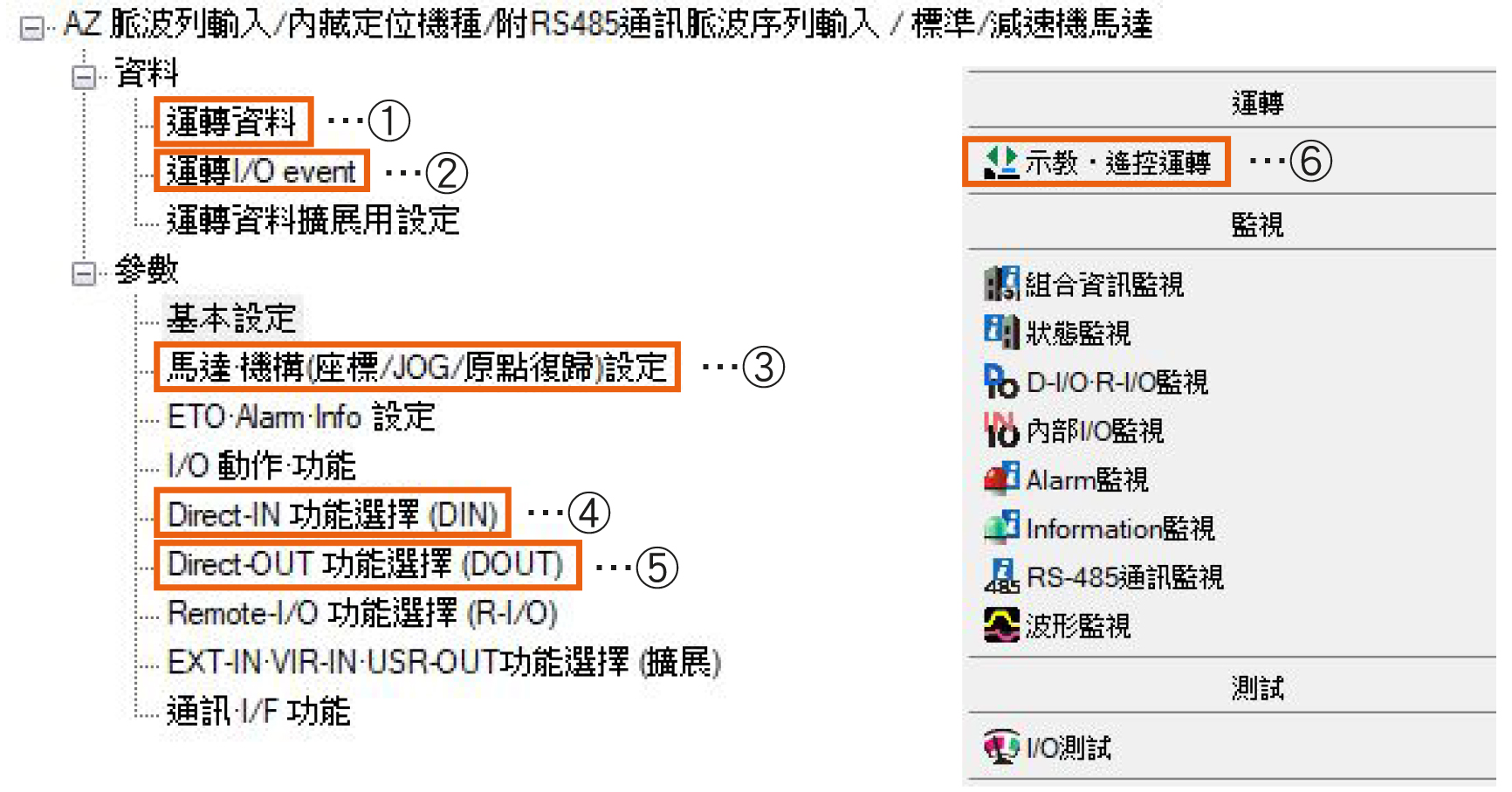
① 運轉資料

② 運轉I/O Event

③ 馬達、機構(座標/JOG/原點復歸)設定

④ Direct-IN功能選擇(DIN)

⑤ Direct-OUT功能選擇(DOUT)

⑥ 示教遙控運轉

在夾爪關閉的狀態下,按位置預設即可重新設定原點。


