
降低成本及提升自由度
常有人使用編碼器或檢知器來控制馬達或提升穩定性。
但這通常會導致設計或製造部門裡增加各種業務及成本,並使配置遭受限制。
附編碼器馬達出貨時已組裝好小型編碼器,有助於減少整體成本、提高設計設備時的自由度。
若設備需要檢知運轉方向、位置及速度,附編碼器馬達會是您的好選擇。

PKP系列
作業現場是否有這樣的意見?
• 選用零件和管理圖面費時費力
• 需要空間裝設聯軸器
• 檢知器配置困難
• 安裝及配線相當耗時
• 很難調整中心及信號的位置
• 維修時需更換的零件變多很麻煩
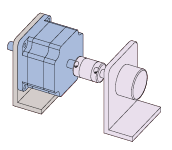
使用編碼器時
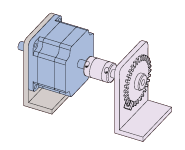
使用縫隙檢知器時
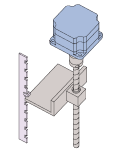
使用擋塊和檢知器時
 您的煩惱,使用附編碼器馬達即可解決。
您的煩惱,使用附編碼器馬達即可解決。
實現整體成本的降低
不僅能減少零件數量,還能刪減各種日常業務。
可藉此加快設備起動的速度。
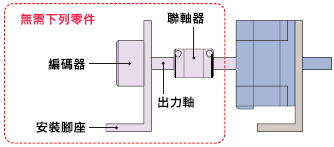
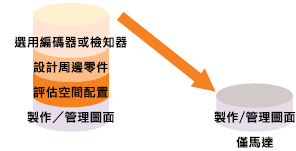
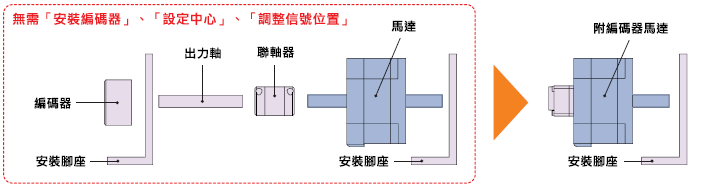
馬達出貨時已事先組裝好編碼器,故得以省略「安裝作業」、「設定中心(alignment)」、「調整信號位置」等需要一些經驗的作業。亦可縮減製作及管理作業步驟書的作業。
此外,簡化設備構成後,也減少了如聯軸器等的幾種維修對象零件。
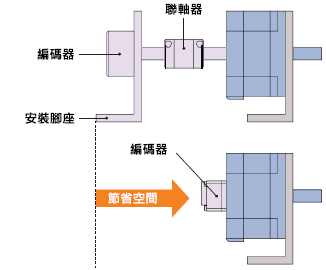
提高設計自由度
不再需要空間以固定編碼器或光電檢知器,有助於縮小設備及提升配置自由度。
本公司備有能因應各種狀況的輸出機種,不僅可用於新設計,亦能用於沿用現有設備的設計。
| Line Driver輸出 | 可實現高速、長距離傳送。耐雜訊性也相當優異。 |
| 電壓輸出 | 可減少零件數量,設計簡潔的介面。 |
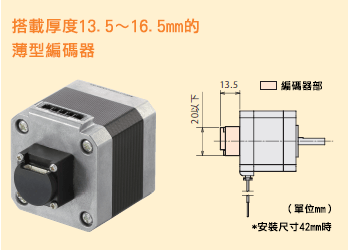
編碼器部規格
| 系列 | PKP系列 | |
|---|---|---|
| 輸出回路 | Line Driver輸出/電壓輸出 | |
| 響應頻率[kHz] | Line Driver輸出:200以下 電壓輸出:100以下 |
|
| 輸出電壓 | H準位 | Line Driver輸出:2.5V以上 電壓輸出:4.3V以上 |
| L準位 | 0.5V以下 | |
| 輸出形式 | 增量式 | |
| 解析度[P/R] | 2相:200、400 ※ 5相:500 |
|
| 輸出信號 | A相、B相、Z相(3ch) | |
※ 高解析度型與SH減速機型僅限400P/R
所謂編碼器,係指檢知馬達轉速與位置的檢知器。
本公司的附編碼器步進馬達採用增量式編碼器。
了解輸出信號(A相、B相、Z相)的使用方法
可配合設備的要求規格選購。
| 轉矩特性 | 振動 噪音 |
系列 | 基本 步級 角 [°] |
安裝尺寸[mm] | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| □20 | □28 | □35 | □42 | □50 | □56.4 | □60 | □85 | |||||
| 5相 DC |
主要於高 速領域發 揮高轉矩 |
相較2相機 種,更能 實現低振 動、低噪音 |
RKP系列 |
0.72 | ● | ● | ● | ● | ||||
| 2相 DC |
主要於低 速領域發 揮高轉矩 |
低振動、 降低噪音 |
PKP系列 |
1.8 | ● | ● | ● | ● | ● | ● | ||
| PKP系列 高解析度型 |
0.9 | ● | ● | ● | ||||||||
| PKP系列 SH減速機型 |
0.05~0.5 | ● | ● | |||||||||


