近年來人工成本高漲,「以機器人取代人工作業」的需求提高,
為了追求符合必要作業、動作的機器人,重新檢討全新設計或更小型化機器人的需求日益增加。
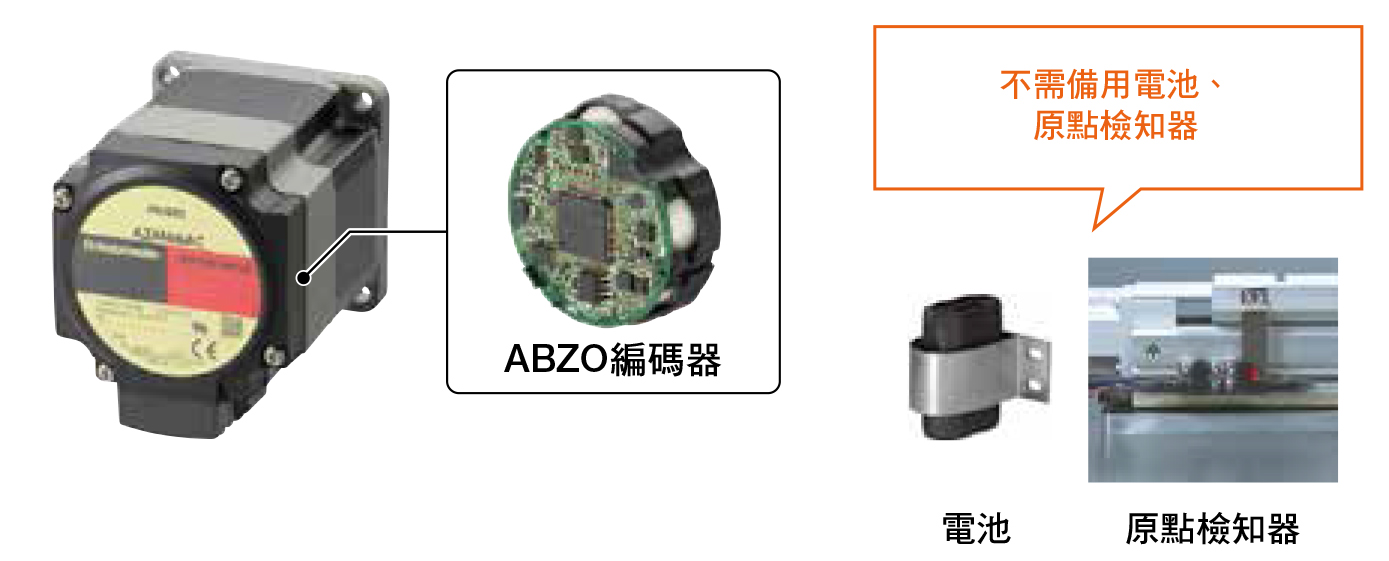
αSTEP AZ系列小型控制馬達搭載機械式編碼器,無需電池即可建構絕對式系統。
可因應並滿足未來機器人小型化的新趨勢。

最適合製作小型機器人的AZ系列
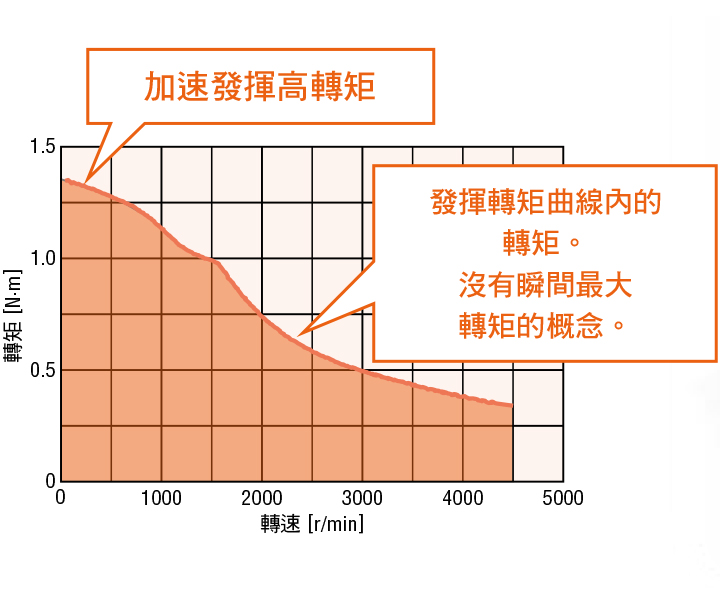
可限制轉矩。
此控制馬達瞬間最大轉矩不會超過特性圖中的額定轉矩。此外,亦可設定最高轉矩限制。
利用轉矩或位置資訊,可在Alarm前預先檢知異常。可利用輸出信號即時停止機器人作業,避免碰撞其他裝置。
根據區域檢知器等外部資訊信號,並透過內部程式,切換為預先設定之轉矩或速度運轉。

可監視、收集各種馬達狀態
部分產品可預先設定臨界值,當回授狀態達到臨界值時即會輸出信號。可用於提升裝置安全性或預防保全。
監視馬達溫度
即使機器人有外殼包覆,也可回授實際溫度,進行監視。

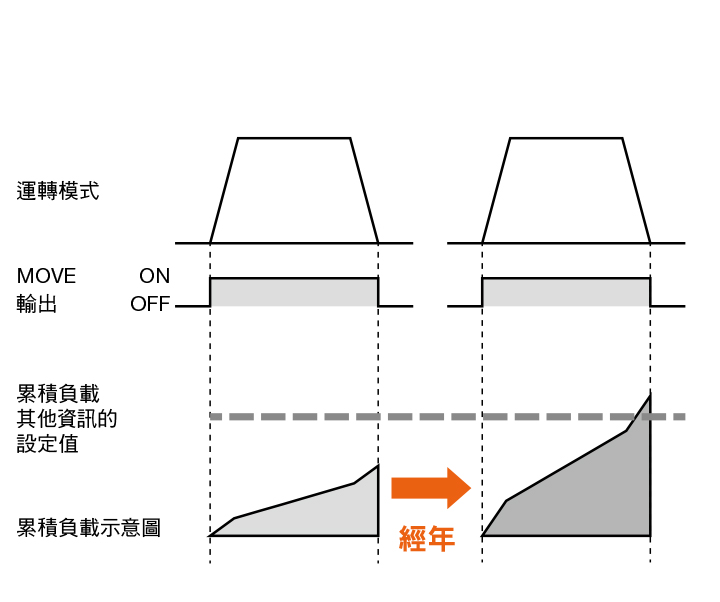
監視累積負載
除了可監視瞬間負載率之外,亦可透過運轉型態(面積)的數據變化,來掌握機構經年累月使用後,而導致增加的摩擦負載,可用於機構異常排除或壽命監控。
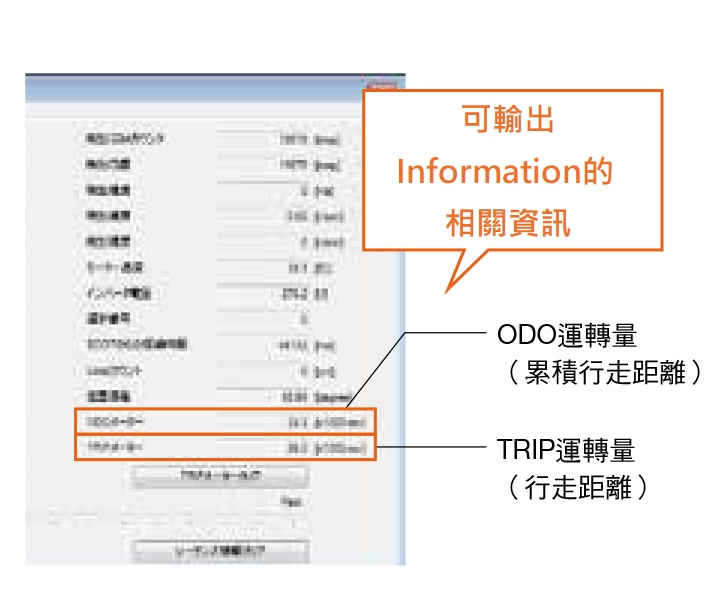
監視ODO/TRIP
可像汽車儀表一樣監視累積運轉數。達到設定的臨界值時,可輸出Information信號。可用於維修等。
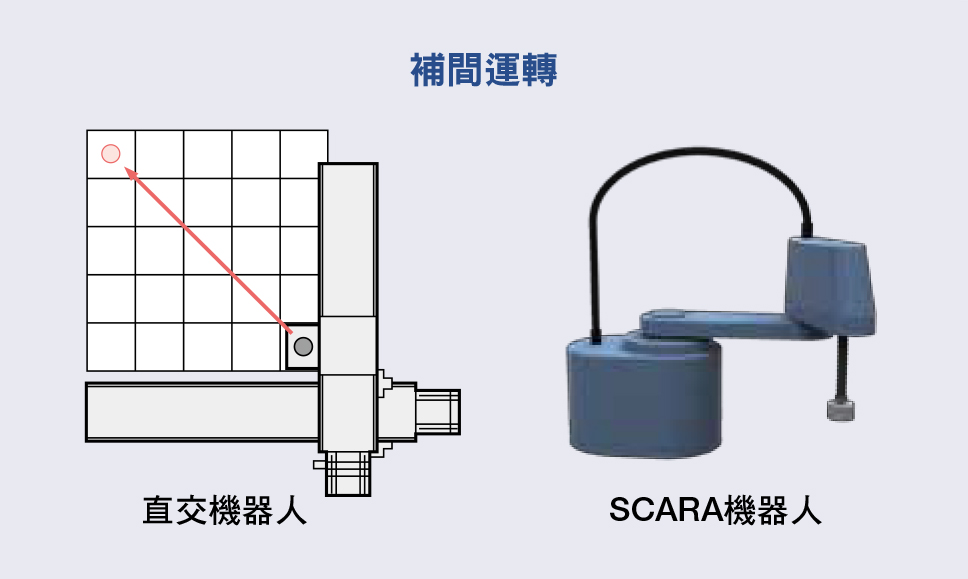
可組合脈波列輸入型驅動器或各種支援FA網路多軸驅動器*
進行補間運轉。

*僅限DC電源輸入型的產品種類
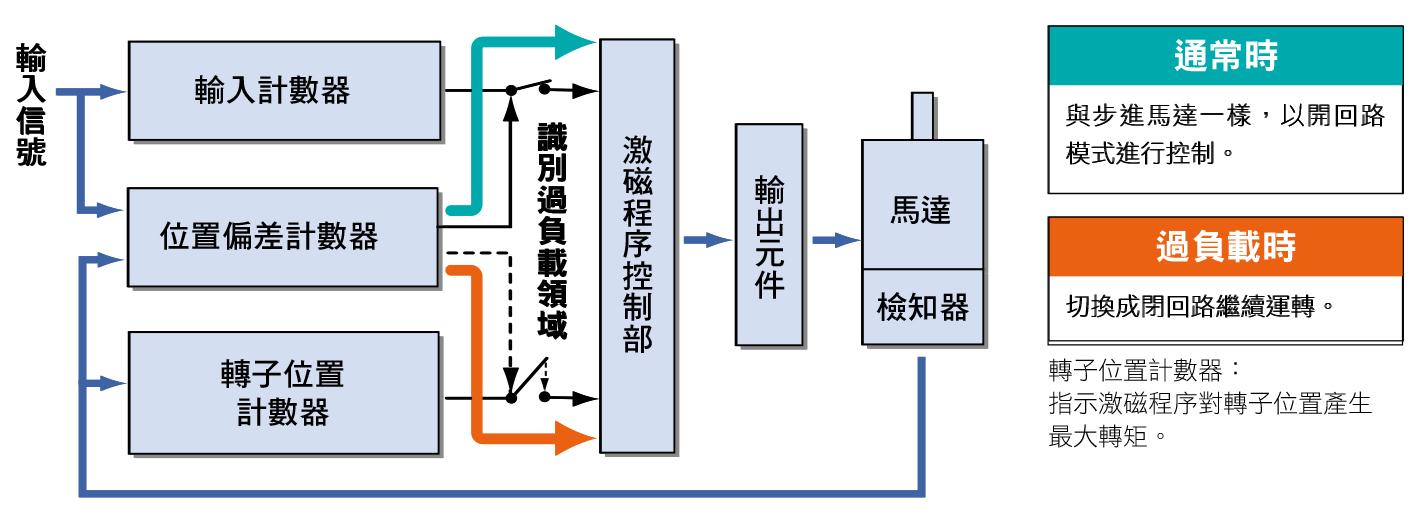
αSTEP是以步進馬達為基礎的馬達,採用獨創的開/閉回路共存控制方式,兼具「開回路控制」與「閉回路控制」的優點。通常與指令同步,以開回路控制進行高響應運轉。當過負載時立即切換成閉回路控制,進行位置修正。
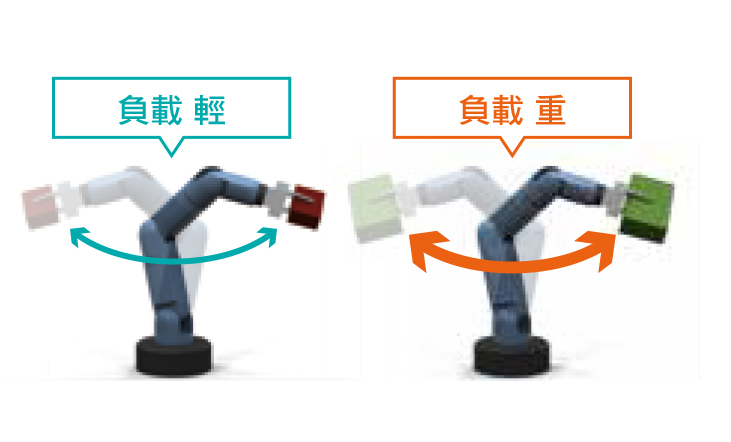
可追上急遽的動作、負載變動
開回路控制相對於指令不會發生延遲,可實現敏銳響應性的動作。若負載激烈變動,則適合使用閉回路控制。
隨時掌握馬達狀態
搭載於馬達上的ABZO編碼器隨時監視馬達狀態。可檢知異常並對應。

不需增益調整
通常為開回路控制,響應性高,卻不需花時間調整增益。

絕對式系統可省去原點等外部檢知器,有助於節省配線,讓構成更為輕巧。
由於使用機械式多圈數絕對式編碼器<ABZO>,不需使用電池保持資料。不需擔心電池的費用、問題或定期維修。
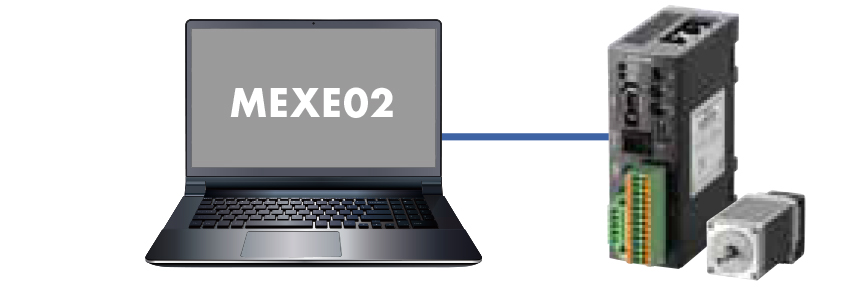
簡化程式
AZ系列的內藏定位功能型搭載連結運轉、運轉時間設定、條件分歧、及回路次數等豐富的編程功能。可簡化上位程序的程式。
亦廣泛用於機器人的末端效應器
夾爪與握把
推壓(握持力)控制、轉矩限制
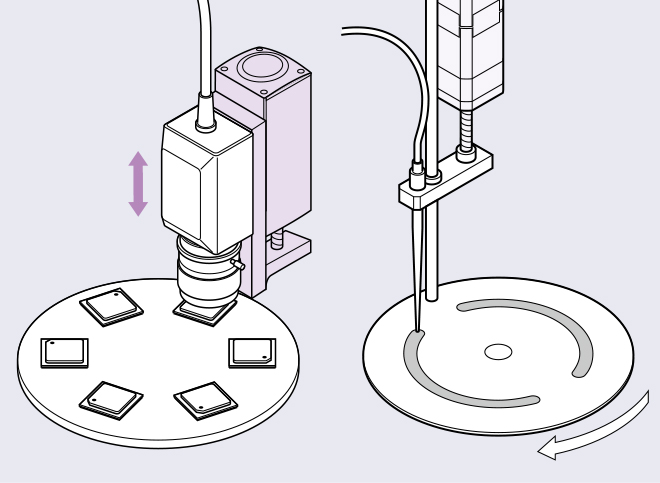
攝影機上下驅動 點膠機
調整正確焦距、
細微吐出量控制、保持力
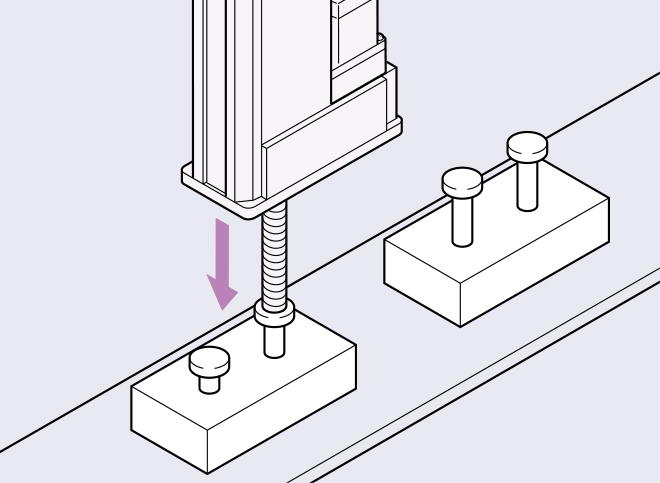
螺絲緊固 壓入
轉矩限制、
緊固時達到設定轉矩即輸出信號
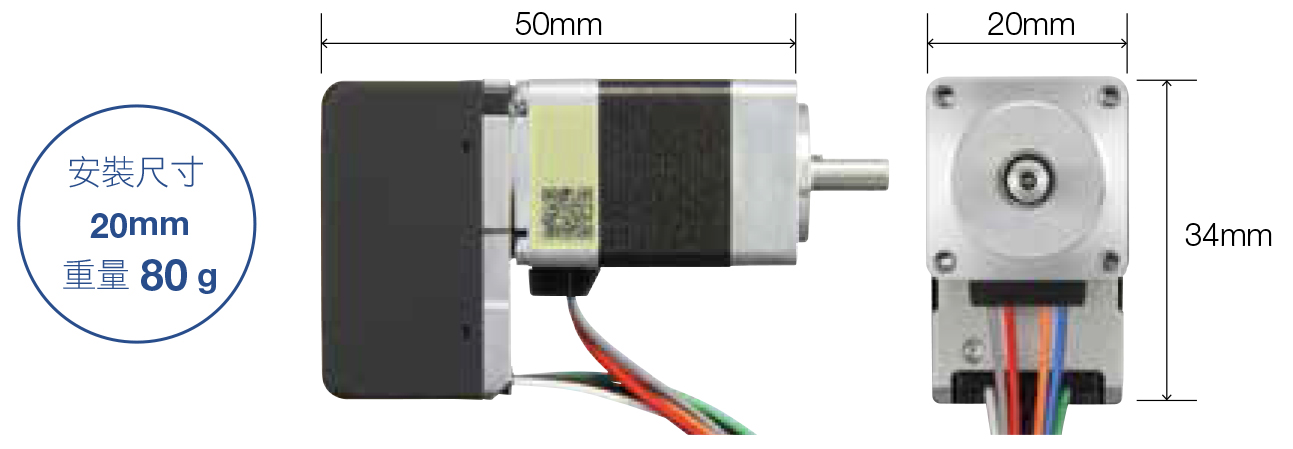
(DC電源輸入)
安裝尺寸:□20mm、□28mm


(DC電源輸入)
安裝尺寸:
PS減速機型 □28mm
諧和式減速機型 □30mm


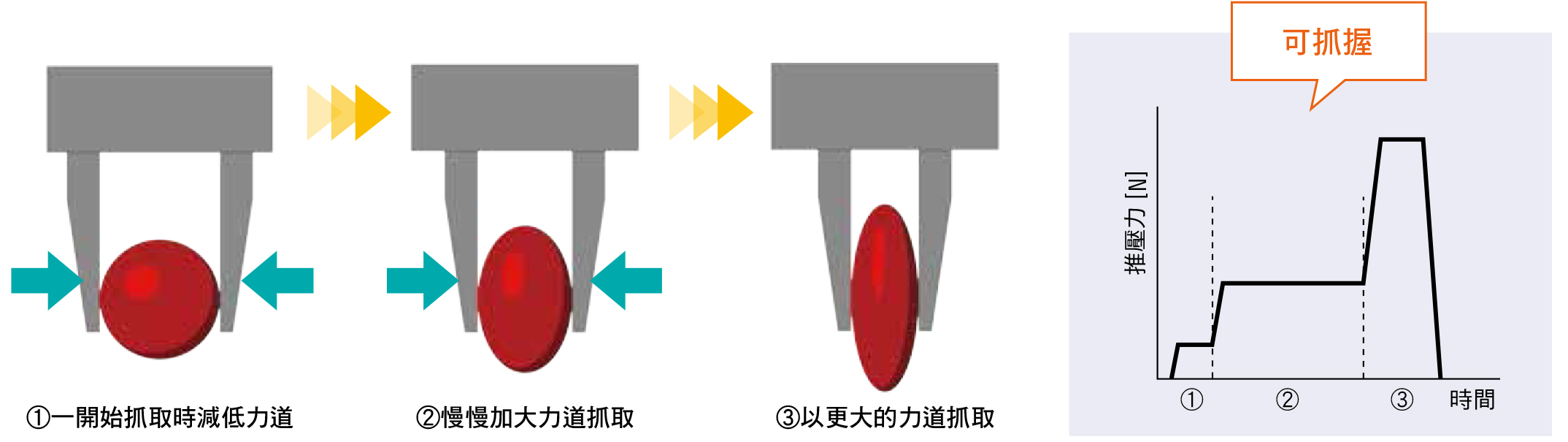
在設定馬達轉矩時,可設定握持力。
並可用信號確認工作物的握持力判定。
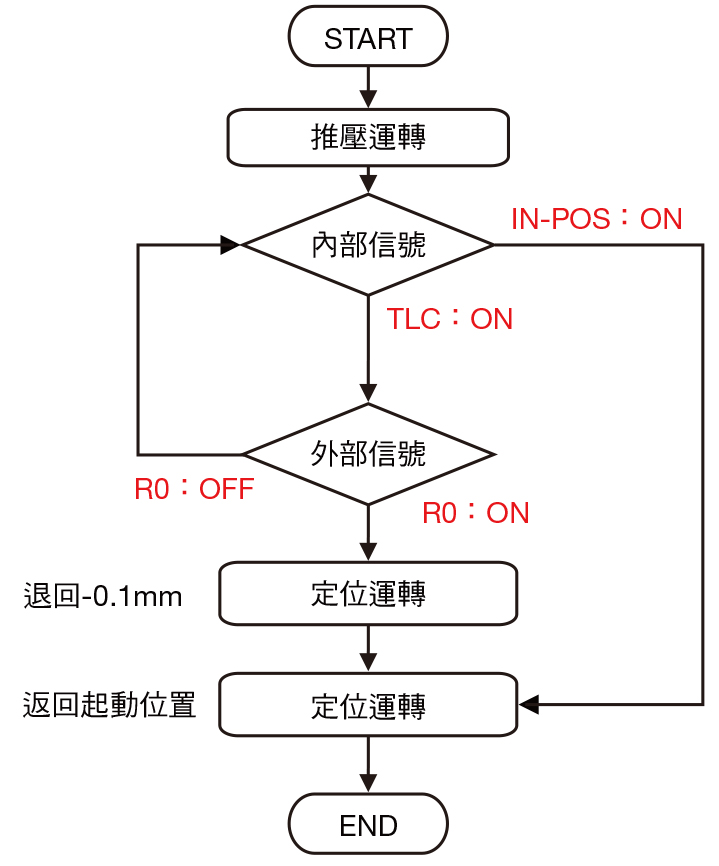
以低推力抓取→慢慢施加力量
AZ系列可自由變更推壓力與時間。
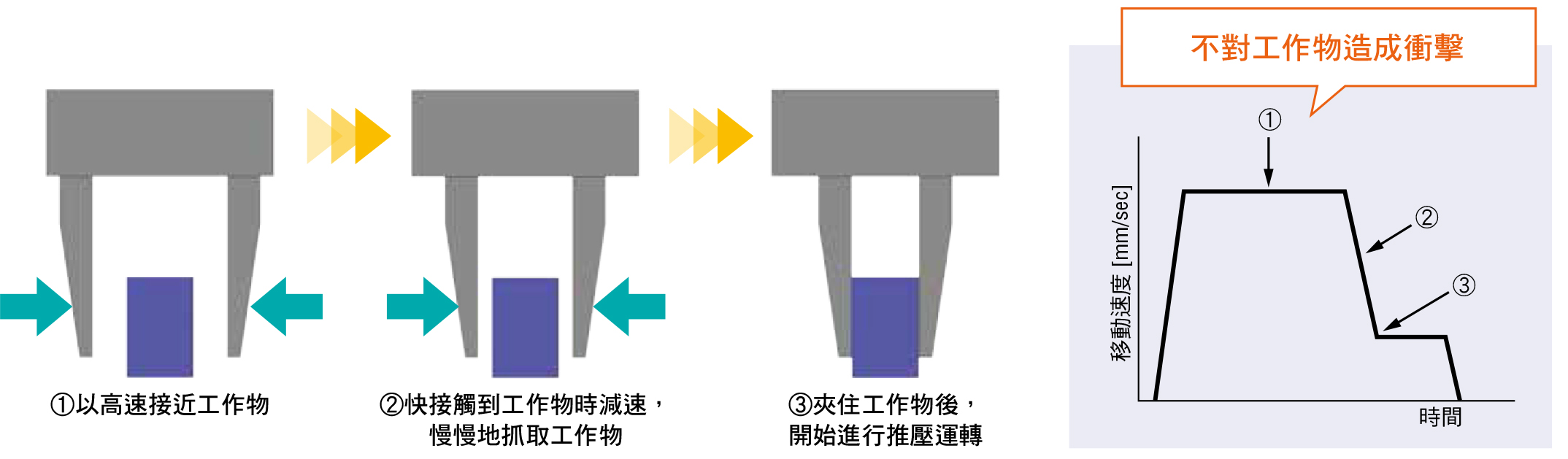
快速移動到快接觸時→慢慢抓取
以高速接近工作物。可在快接觸時減速,並以低速進行推壓。
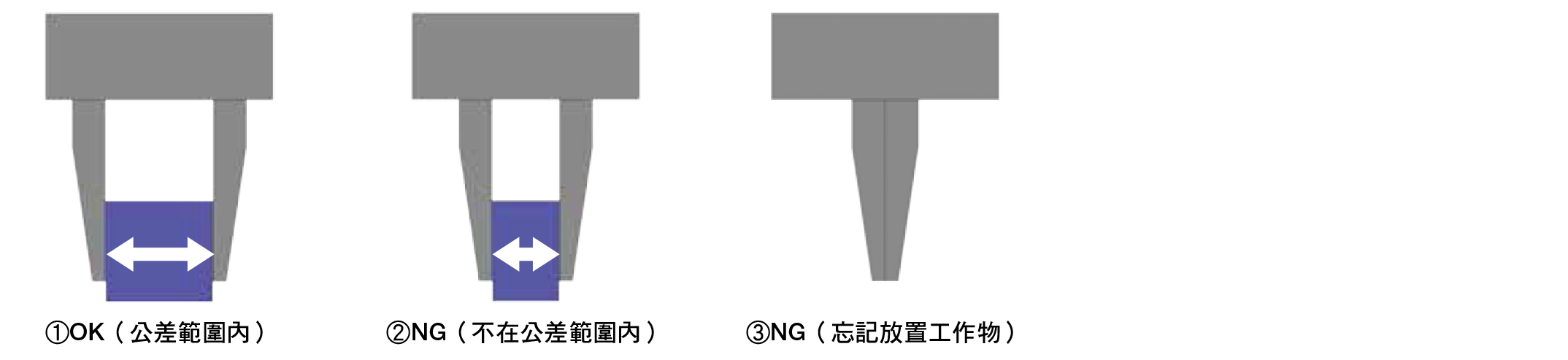
判定工作物
藉由合併輸出AREA信號與TLC信號,可判定工作物。
※AREA信號:馬達位於設定的區域內時輸出的信號。
TLC輸出:於推壓運轉中,輸出轉矩達到設定的轉矩限制值時輸出的信號。
機器人與周邊機器的配合
機器人周圍有障礙物時,可設定禁止進入範圍。
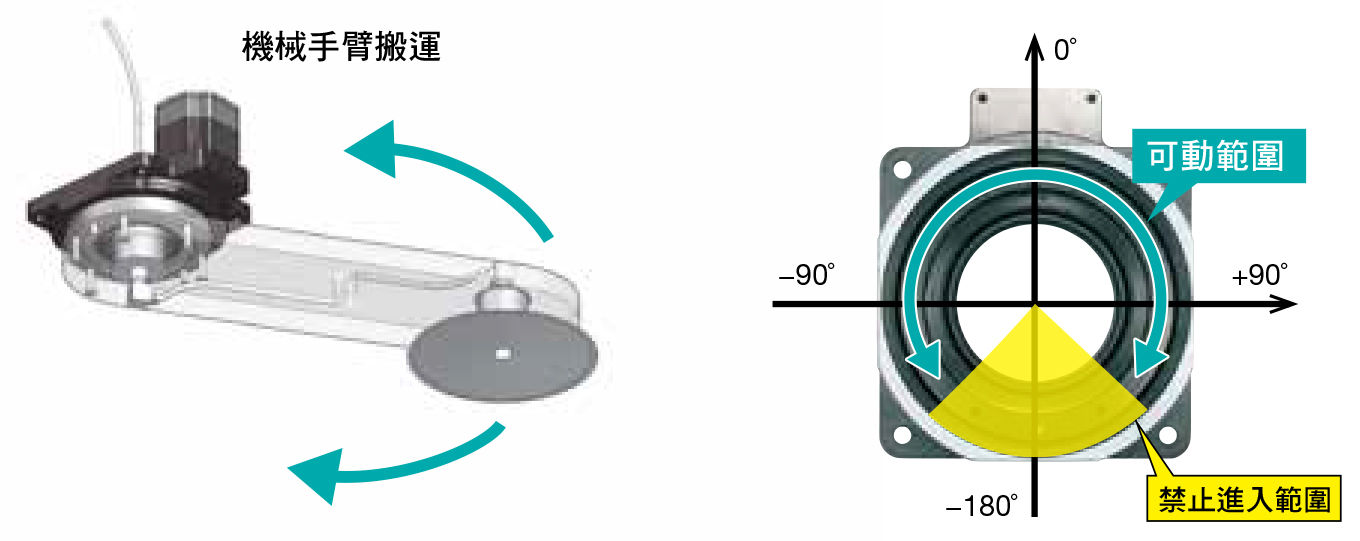

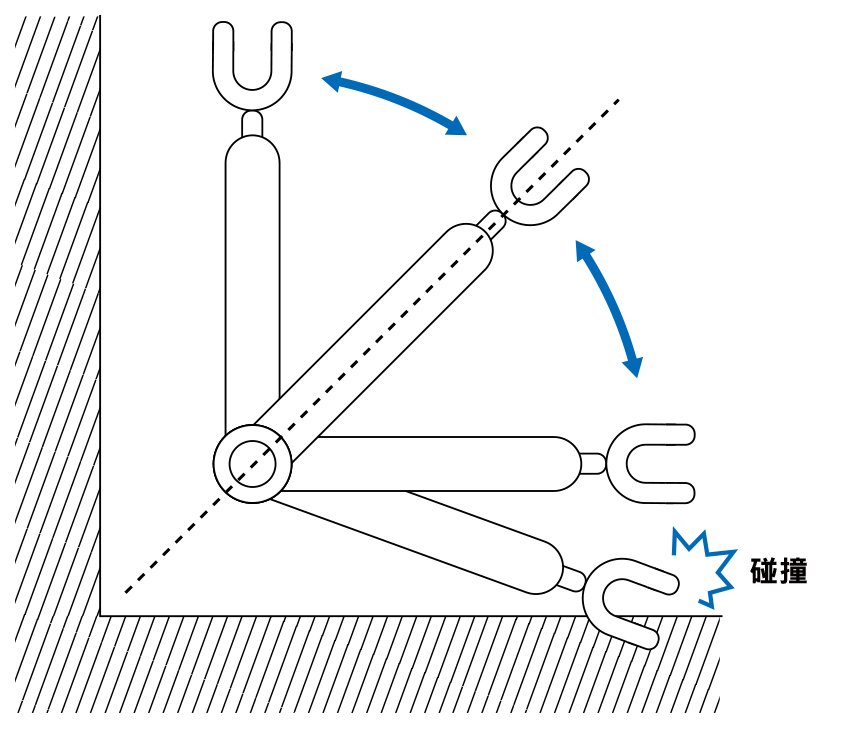
我們正在研發可在90°範圍內水平驅動的機械手臂。
但此裝置的周圍受到空間限制,較難設置外部檢知器。
在不裝外部檢知器的前提下,是否有方法可限制機械手臂的動作?


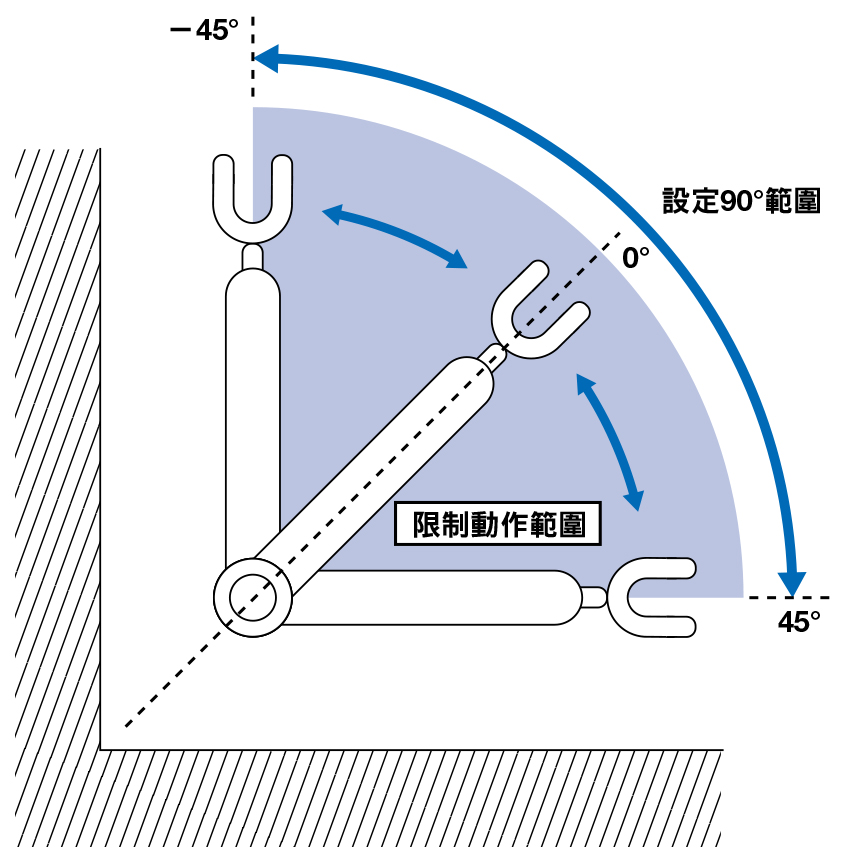
軟體極限功能可限制動作範圍。
到達參數設定的限制值時,馬達就會停止。
判定工作物的大小。




Event跳轉功能是指根據運轉I/O Event的「EVENT觸發 I/O」中所設的信號ON/OFF,使運轉分歧。

這次設置3個區域進行推壓運轉,可組合推壓工作物時發出的TLC信號進行判斷。