

「自動化設備及產線的配置自由」,以及能夠應用於這個目標的東方馬達產品。
*日本經濟產業省《2021年版製造白皮書》中記載:「唯有實現靈活、可迅速替換的生產線,才能提升企業的動態能力。」(2021年5月,第1章第2節)
以搬運機器人取代會分割產線的搬運輸送帶,即可讓搬運更有彈性,提高產線的效率。如果是動作靈巧的搬運機器人,即使空間有限也能自由移動,是能有效提升空間效率的一種方法。
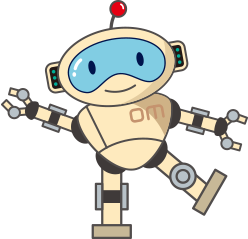
將設備依各製程模組化,即有望配合產品彈性變更配置。為了達到設備模組化,必須以一定的尺寸統一設備規格,並精簡電源配線。此外,設備移動為實現模組化的前提,故也需要將設備的輕量化及輕巧化納入考量。
也許在不久的將來,所有的生產設備都能藉由電池驅動自行移動,在配置上也能透過AI以更有效率的移動路徑去變更。
東方馬達提供2項要素

移動自動化對應產品是指以電池驅動、小型輕量為共通概念的產品群。
最適合用於構成當今漸受注目的彈性自動化設備及產線,例如搬運機器人或模組化的生產設備等等。
〈舉例來說,可以做到下圖所示的配置自由化計畫〉

搬運機器人
多關節機械手臂型
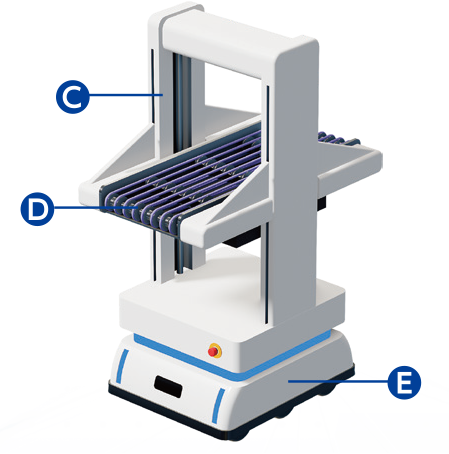
搬運機器人
升降設備型

搬運機器人
輸送帶型
各關節部驅動/AZ系列
手爪/電動夾爪 EH系列
機器人控制器
齒條·齒輪系統 L系列
BLV系列 R型
BLV系列 R型
 是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,
是以步進馬達為基礎的馬達,採用獨創的混合式控制方式,兼具「開回路控制」與「閉回路控制」的優點。
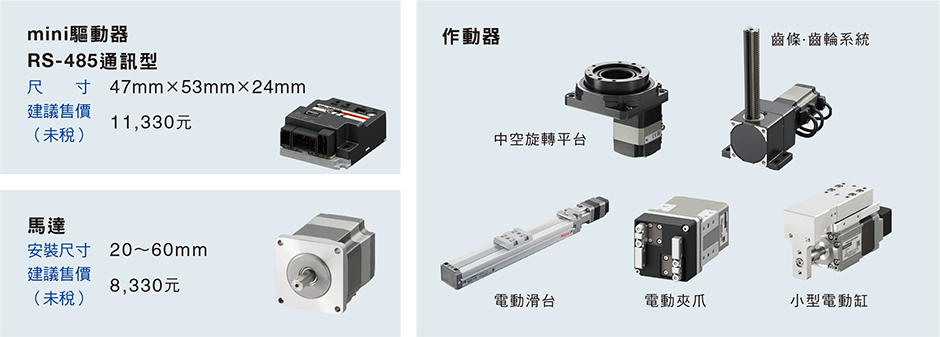
![]() 採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。無需電池即可實現絕對式系統。mini驅動器採用小型、輕量設計,目標為組裝用途或減少電控箱空間,可連接本公司AZ系列DC電源輸入馬達,以及搭載該馬達的電動模組產品。有助於開發電池驅動機器。
採用本公司獨創的閉回路控制系統,搭載新開發的ABZO編碼器。無需電池即可實現絕對式系統。mini驅動器採用小型、輕量設計,目標為組裝用途或減少電控箱空間,可連接本公司AZ系列DC電源輸入馬達,以及搭載該馬達的電動模組產品。有助於開發電池驅動機器。
對應EtherCAT驅動規範(Drive Profile)
支援EtherCAT通訊的小型、輕量驅動器。可連接本公司AZ系列DC電源輸入馬達,以及搭載該馬達的電動模組產品。

廣大的速度控制範圍。
可以從1r/min開始低速運轉,達到流暢驅動。馬達與驅動器皆大幅縮小體積、減輕重量。驅動器與舊有產品相比更加輕巧,減少約80%。尺寸大小適合安裝於設備內的有限空間。

本公司以搬運機器人所需的4大要點:「低底盤、薄型設計」、「高耐載重性能」、「停止位置的設定及微調」以及「筆直行走、迴避、停止」為切入點,以影片的形式介紹活用提案。有助於解決各個生產現場當中的多樣化行走模式及搬運物型態。


